探索拖火车混合A星路径规划算法
拖火车混合a星路径规划算法在路径规划领域,各种算法层出不穷,今天咱就唠唠拖火车混合A星路径规划算法。这算法融合了传统A星算法的优势,并针对特定场景进行了创新,就像是给A星算法穿上了特制的“战衣”,以应对更复杂的路况。
拖火车混合a星路径规划算法
在路径规划领域,各种算法层出不穷,今天咱就唠唠拖火车混合A星路径规划算法。这算法融合了传统A星算法的优势,并针对特定场景进行了创新,就像是给A星算法穿上了特制的“战衣”,以应对更复杂的路况。
A星算法基础回顾
A星算法是一种启发式搜索算法,它结合了Dijkstra算法的广度优先搜索和最佳优先搜索的优点。核心公式为:
f(n) = g(n) + h(n)g(n)是从起点到节点n的实际代价。h(n)是从节点n到目标点的预估代价。f(n)则是综合这两者的评估函数,算法会优先选择f(n)值最小的节点进行扩展。
示例代码(简单的网格地图A星实现):
import heapq
# 定义网格地图
grid = [[0, 0, 0, 0],
[0, 1, 0, 0],
[0, 0, 0, 0],
[0, 0, 0, 0]]
# 起点和终点
start = (0, 0)
goal = (3, 3)
# 启发函数(曼哈顿距离)
def heuristic(a, b):
return abs(a[0] - b[0]) + abs(a[1] - b[1])
def a_star_search(grid, start, goal):
open_set = []
heapq.heappush(open_set, (0, start))
came_from = {}
g_score = {node: float('inf') for node in [(x, y) for x in range(len(grid)) for y in range(len(grid[0]))]}
g_score[start] = 0
f_score = {node: float('inf') for node in [(x, y) for x in range(len(grid)) for y in range(len(grid[0]))]}
f_score[start] = heuristic(start, goal)
while open_set:
_, current = heapq.heappop(open_set)
if current == goal:
path = []
while current in came_from:
path.append(current)
current = came_from[current]
path.append(start)
path.reverse()
return path
for dx, dy in [(0, 1), (1, 0), (0, -1), (-1, 0)]:
neighbor = (current[0] + dx, current[1] + dy)
if 0 <= neighbor[0] < len(grid) and 0 <= neighbor[1] < len(grid[0]) and grid[neighbor[0]][neighbor[1]] == 0:
tentative_g_score = g_score[current] + 1
if tentative_g_score < g_score[neighbor]:
came_from[neighbor] = current
g_score[neighbor] = tentative_g_score
f_score[neighbor] = tentative_g_score + heuristic(neighbor, goal)
if neighbor not in [i[1] for i in open_set]:
heapq.heappush(open_set, (f_score[neighbor], neighbor))
return None拖火车混合A星算法的改进
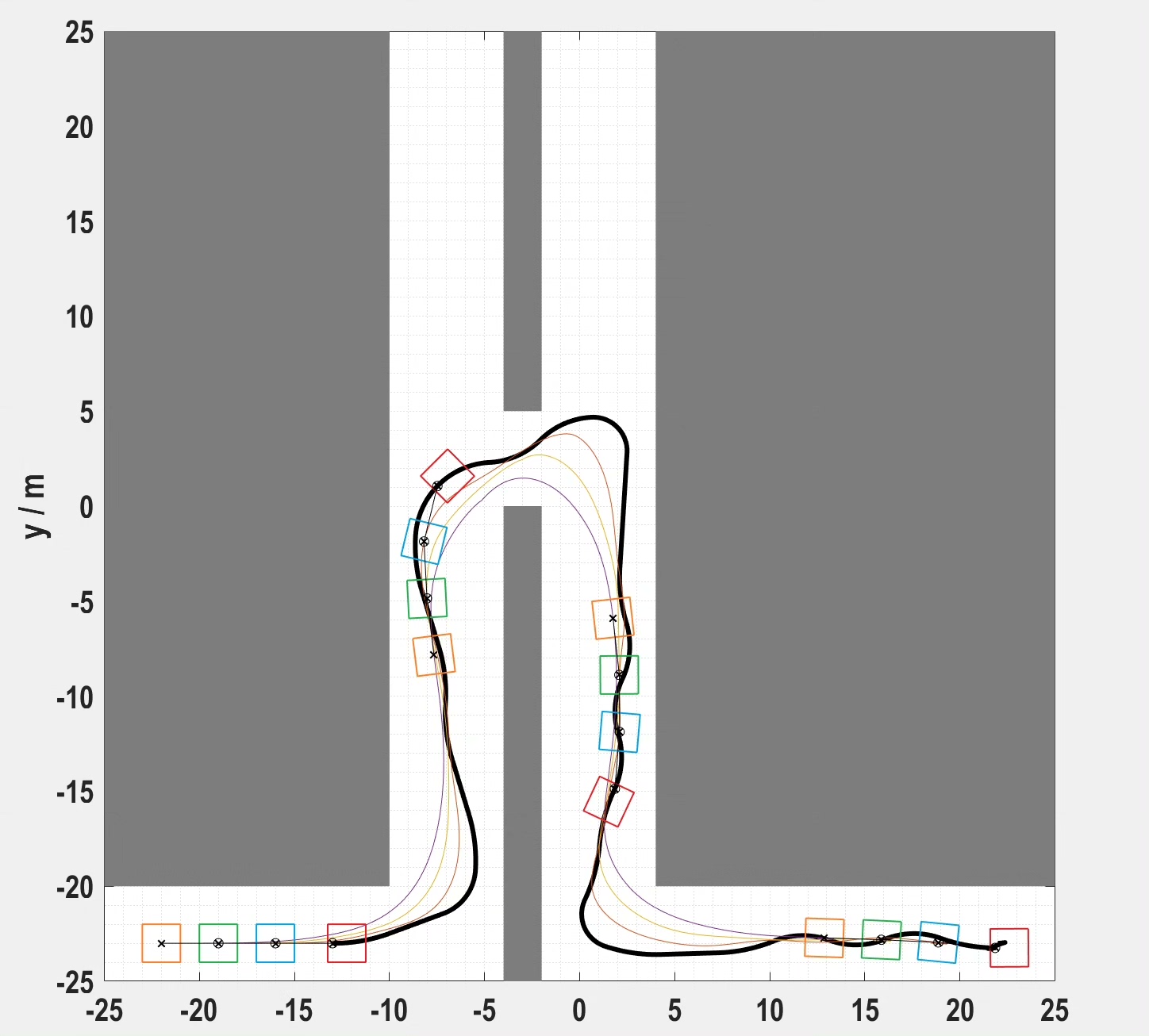
拖火车混合A星算法针对类似拖火车场景进行了优化。想象一下,一辆拖着长长的车厢的火车在复杂的轨道网络中行驶,传统A星算法可能就有点力不从心了。这时候拖火车混合A星算法就派上用场啦。
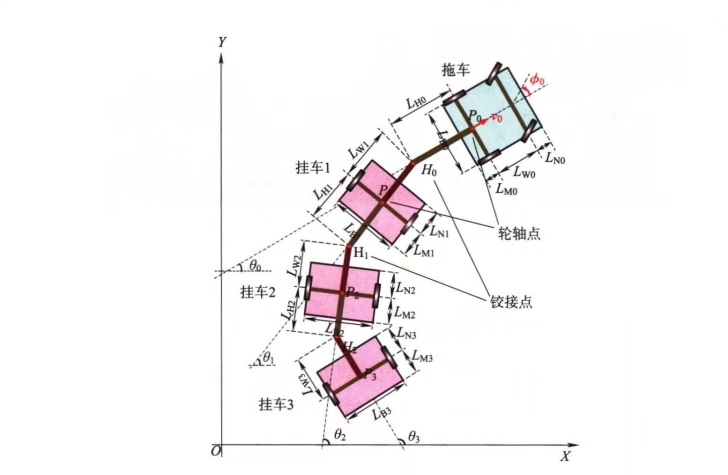
它在传统A星的基础上,考虑了火车车身长度以及转弯半径等限制。比如说,在评估节点时,会增加一个与车身相关的惩罚因子。假设车身长度为 L,当扩展节点时,如果新节点会导致车身部分处于不可通行区域,就会增加一个较大的 penalty 值到 g(n) 中。
# 假设火车车身长度
L = 3
def custom_heuristic(a, b):
# 这里简单处理,实际可更复杂
return abs(a[0] - b[0]) + abs(a[1] - b[1])
def train_a_star_search(grid, start, goal):
open_set = []
heapq.heappush(open_set, (0, start))
came_from = {}
g_score = {node: float('inf') for node in [(x, y) for x in range(len(grid)) for y in range(len(grid[0]))]}
g_score[start] = 0
f_score = {node: float('inf') for node in [(x, y) for x in range(len(grid)) for y in range(len(grid[0]))]}
f_score[start] = custom_heuristic(start, goal)
while open_set:
_, current = heapq.heappop(open_set)
if current == goal:
path = []
while current in came_from:
path.append(current)
current = came_from[current]
path.append(start)
path.reverse()
return path
for dx, dy in [(0, 1), (1, 0), (0, -1), (-1, 0)]:
neighbor = (current[0] + dx, current[1] + dy)
if 0 <= neighbor[0] < len(grid) and 0 <= neighbor[1] < len(grid[0]) and grid[neighbor[0]][neighbor[1]] == 0:
# 检查车身是否有部分在不可通行区域
is_body_blocked = False
for i in range(1, L):
body_part = (neighbor[0] + i * dx, neighbor[1] + i * dy)
if not (0 <= body_part[0] < len(grid) and 0 <= body_part[1] < len(grid[0])) or grid[body_part[0]][body_part[1]] == 1:
is_body_blocked = True
break
if is_body_blocked:
penalty = 10
else:
penalty = 0
tentative_g_score = g_score[current] + 1 + penalty
if tentative_g_score < g_score[neighbor]:
came_from[neighbor] = current
g_score[neighbor] = tentative_g_score
f_score[neighbor] = tentative_g_score + custom_heuristic(neighbor, goal)
if neighbor not in [i[1] for i in open_set]:
heapq.heappush(open_set, (f_score[neighbor], neighbor))
return None拖火车混合A星算法通过这样的改进,能更有效地为拖火车这类特殊载体规划出合理的路径,避免车身碰撞等问题,在实际应用中,比如自动化物流园区的拖车调度,或者一些大型工业场景的轨道运输中,有着广阔的应用前景。随着技术的不断发展,相信这类融合创新的路径规划算法会越来越强大,为我们的生活和生产带来更多便利。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐

 3
3 0
0- 0



 已为社区贡献16条内容
已为社区贡献16条内容

所有评论(0)