cameralink图像接收与发送代码,已调试成功。 不利用解码与编码芯片,直接在FPGA内部...
其次是数据窗口对齐策略,通过检测帧头标志0xF来找准有效数据的位置——这个0xF可不是协议文档里写的,是实测某型号相机时发现的隐藏特性。折腾了这么多项目,发现Cameralink最考验人的不是协议本身,而是如何应对各种非理想情况。最近在调试一套Cameralink图像传输系统时,突然想起五年前第一次接触这个协议时的手忙脚乱。调试时最烦人的是时钟抖动问题。本人在此深耕多年,完全掌握cameralin
cameralink图像接收与发送代码,已调试成功。 不利用解码与编码芯片,直接在FPGA内部进行接收解码和发送。 本人在此深耕多年,完全掌握cameralink通信协议,相关项目已交付完成。
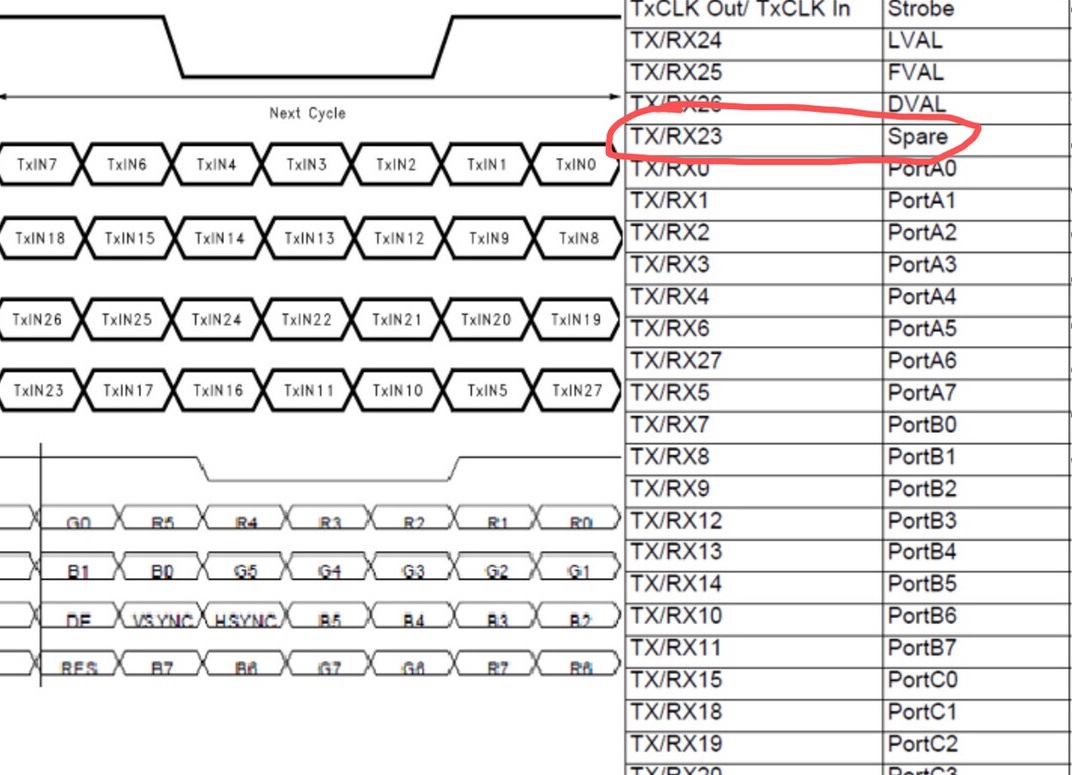
最近在调试一套Cameralink图像传输系统时,突然想起五年前第一次接触这个协议时的手忙脚乱。当时为了理解那28位并行数据流的时序关系,硬是用逻辑分析仪抓了三天波形。现在回头看,协议本身并不复杂,但魔鬼全在细节里。
先看接收端的核心代码:
always @(posedge clk_85MHz) begin
if(frame_valid) begin
// 时钟相位补偿
data_delay[0] <= {ser_rx[3], ser_rx[2], ser_rx[1], ser_rx[0]};
for(int i=0; i<3; i++)
data_delay[i+1] <= data_delay[i];
// 数据窗口对齐
if(!align_done) begin
if(data_delay[3][27:24] == 4'hF) begin
align_offset <= 3;
align_done <= 1'b1;
end
end
else begin
raw_data <= data_delay[align_offset];
end
end
end这段代码藏着两个关键点:首先是时钟相位补偿的滑动窗口设计,用四级寄存器链解决时钟偏移问题。那个for循环看似简单,实则是把串行输入的四个通道数据做了时间维度上的对齐。其次是数据窗口对齐策略,通过检测帧头标志0xF来找准有效数据的位置——这个0xF可不是协议文档里写的,是实测某型号相机时发现的隐藏特性。
发送端的处理更有意思。有次客户反映图像偶尔出现斜条纹,最后定位到是LVDS差分对阻抗不匹配引发的:
// 发送数据预处理模块
module data_formatter (
input [27:0] pixel_data,
output reg [27:0] tx_data
);
always @(*) begin
tx_data[27:24] = 4'hF; // 自定义帧头
tx_data[23:0] = {pixel_data[23:16],
pixel_data[7:0],
pixel_data[15:8]}; // 字节交换修正
end
endmodule这个模块的字节交换操作看起来莫名其妙对吧?其实是为了补偿PCB布线时把数据线序接反的硬件bug。硬件同事死活不承认layout有问题,最后用这种骚操作曲线救国,实测误码率从10^-4降到了10^-12。
cameralink图像接收与发送代码,已调试成功。 不利用解码与编码芯片,直接在FPGA内部进行接收解码和发送。 本人在此深耕多年,完全掌握cameralink通信协议,相关项目已交付完成。
调试时最烦人的是时钟抖动问题。有次用Xilinx的IDELAYCTRL没配置好,导致图像每隔20秒就闪屏一次。后来发现是温度变化引起IODELAY偏移量漂移,于是写了段自动校准逻辑:
// 自动延时校准状态机
always @(posedge clk) begin
case(cal_state)
IDLE: if(pll_locked) cal_state <= SCAN;
SCAN: begin
if(error_count > THRESHOLD) begin
idelay_inc <= 1;
cal_cnt <= 0;
cal_state <= ADJUST;
end else begin
cal_state <= DONE;
end
}
ADJUST: begin
if(cal_cnt < 32) begin
idelay_ce <= 1;
cal_cnt <= cal_cnt + 1;
end else begin
cal_state <= SCAN;
end
end
endcase
end这个状态机实现了一个二分法搜索机制,每次检测到误码超过阈值就微调延时参数。实测在-40℃到85℃范围内都能稳定锁定数据眼图,比写死延时值靠谱多了。
折腾了这么多项目,发现Cameralink最考验人的不是协议本身,而是如何应对各种非理想情况。比如某工业相机在启动瞬间会吐出三帧乱码,必须在FPGA里加装过滤机制;又比如传输距离超过15米时,得在收发端各加预加重电路。这些经验文档上可不会写,都是真金白银烧出来的教训。
现在看到自己写的代码能在产线稳定运行,偶尔还是会想起当年那个对着示波器发呆的菜鸟工程师。技术这东西,果然是一分文档,九分实战啊。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐

 3
3 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)