STM32物联网套件基础版05-外部中断
前言上一节我们学习了单片机独立按键操作,实际上我们采用的是查询的方法,MCU实时检测有无按键按下比较占用MCU资源,本节我们将使用中断的方法实现按键操作。一、基础知识1. STM32物联网套件简介STM32物联网套件目前有两个版本:基础版和高级版,后续会增加应用版本和语音版,核心板均采用STM32F103C8T6核心板,基础版主要元器件如下所示:高级版版主要元器件如下所示:STM32物联网套件致力
前言
上一节我们学习了单片机独立按键操作,实际上我们采用的是查询的方法,MCU实时检测有无按键按下比较占用MCU资源,本节我们将使用中断的方法实现按键操作。
一、基础知识
1. STM32物联网套件简介
STM32物联网套件目前有两个版本:基础版和高级版,后续会增加应用版本和语音版,核心板均采用STM32F103C8T6核心板,基础版主要元器件如下所示:
高级版版主要元器件如下所示:
STM32物联网套件致力于带领大家入门物联网,不仅学习STM32,也了解转微信小程序开发、物联网服务器后台开发,真正做到了解一个物联网项目的方方面面,基于此,我们定制了一套通用的WIFI通讯协议(可以理解为类似AT指令,不过集成度更高,几条指令就可以直连接云平台),如三条指令连接腾讯云实例。
后续我们会继续增加涂鸦智能、电信云、移动Onenet、阿里云等主流云平台的支持,力争做到,一套STM32代码,通过定制的WIFI模块可以连接到不同的云平台,也欢迎有产品开发需求的朋友私聊我们咨询、定制物联网方案!
本套物联网套件可以支持大学生参加物联网相关比赛、申请学校大创项目、完成毕业设计等,我们的定位是做一家开源智能硬件服务商,和大家一起探索物联网,我们的使命是推动更多物联网产品的落地和普及,让技术不再是阻碍!
2.中断简介
中断是指CPU在执行A事件的时候,突然收到B事件发出的(中断)请求,CPU停止手中的事情,转而去执行B事件,B事件执行完毕后,又回到原来A事件被打断的地方,继续执行程序的过程,示意图如下所示: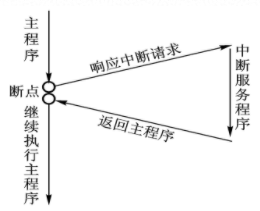
STM32单片机使用NVIC(嵌套向量中断控制器)来管理中断,主要有三部分:中断使能、抢占优先级设置、响应优先级设置,注意:优先级数值越小,优先级别越高;
其中中断使能控制中断是否打开,抢占优先级用来判断中断是否可以相互打断,高抢占优先级可以打断低抢占优先级(低抢占优先级任务正在执行时候来了高抢占优先级中断,系统会暂停执行当前任务,转去执行高抢占优先级任务,执行完毕后继续返回执行低抢占优先级任务)。
当两个中断抢占优先级相同时候,系统会根据相应优先级的高低选择执行任务,
3.中断优先级分组
问题来了,已经说到STM32单片机可以使用NVIC管理诸多中断,那么STM32一共有多少个中断呢? 我们打开startup_stm32f103xb.s启动文件中中断向量表分配,如下:
__Vectors DCD __initial_sp ; Top of Stack
DCD Reset_Handler ; Reset Handler
DCD NMI_Handler ; NMI Handler
DCD HardFault_Handler ; Hard Fault Handler
DCD MemManage_Handler ; MPU Fault Handler
DCD BusFault_Handler ; Bus Fault Handler
DCD UsageFault_Handler ; Usage Fault Handler
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD SVC_Handler ; SVCall Handler
DCD DebugMon_Handler ; Debug Monitor Handler
DCD 0 ; Reserved
DCD PendSV_Handler ; PendSV Handler
DCD SysTick_Handler ; SysTick Handler
; External Interrupts
DCD WWDG_IRQHandler ; Window Watchdog
DCD PVD_IRQHandler ; PVD through EXTI Line detect
DCD TAMPER_IRQHandler ; Tamper
DCD RTC_IRQHandler ; RTC
DCD FLASH_IRQHandler ; Flash
DCD RCC_IRQHandler ; RCC
DCD EXTI0_IRQHandler ; EXTI Line 0
DCD EXTI1_IRQHandler ; EXTI Line 1
DCD EXTI2_IRQHandler ; EXTI Line 2
DCD EXTI3_IRQHandler ; EXTI Line 3
DCD EXTI4_IRQHandler ; EXTI Line 4
DCD DMA1_Channel1_IRQHandler ; DMA1 Channel 1
DCD DMA1_Channel2_IRQHandler ; DMA1 Channel 2
DCD DMA1_Channel3_IRQHandler ; DMA1 Channel 3
DCD DMA1_Channel4_IRQHandler ; DMA1 Channel 4
DCD DMA1_Channel5_IRQHandler ; DMA1 Channel 5
DCD DMA1_Channel6_IRQHandler ; DMA1 Channel 6
DCD DMA1_Channel7_IRQHandler ; DMA1 Channel 7
DCD ADC1_2_IRQHandler ; ADC1_2
DCD USB_HP_CAN1_TX_IRQHandler ; USB High Priority or CAN1 TX
DCD USB_LP_CAN1_RX0_IRQHandler ; USB Low Priority or CAN1 RX0
DCD CAN1_RX1_IRQHandler ; CAN1 RX1
DCD CAN1_SCE_IRQHandler ; CAN1 SCE
DCD EXTI9_5_IRQHandler ; EXTI Line 9..5
DCD TIM1_BRK_IRQHandler ; TIM1 Break
DCD TIM1_UP_IRQHandler ; TIM1 Update
DCD TIM1_TRG_COM_IRQHandler ; TIM1 Trigger and Commutation
DCD TIM1_CC_IRQHandler ; TIM1 Capture Compare
DCD TIM2_IRQHandler ; TIM2
DCD TIM3_IRQHandler ; TIM3
DCD TIM4_IRQHandler ; TIM4
DCD I2C1_EV_IRQHandler ; I2C1 Event
DCD I2C1_ER_IRQHandler ; I2C1 Error
DCD I2C2_EV_IRQHandler ; I2C2 Event
DCD I2C2_ER_IRQHandler ; I2C2 Error
DCD SPI1_IRQHandler ; SPI1
DCD SPI2_IRQHandler ; SPI2
DCD USART1_IRQHandler ; USART1
DCD USART2_IRQHandler ; USART2
DCD USART3_IRQHandler ; USART3
DCD EXTI15_10_IRQHandler ; EXTI Line 15..10
DCD RTC_Alarm_IRQHandler ; RTC Alarm through EXTI Line
DCD USBWakeUp_IRQHandler ; USB Wakeup from suspend
__Vectors_End
其中从Reset_Handler开始,一直到SysTick_Handler,总计10个, 为不可屏蔽中断,属于内核中断,其余中断为外部中断,而NVIC就是管理外部中断的,接下来我们看下中断优先级分组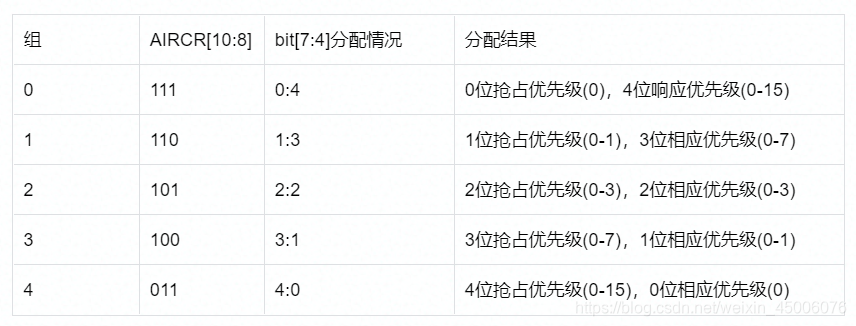
举个例子:
设置分组1,中断3(RTC)的抢占优先级为1,响应优先级为0,中断7(外部中断1)的抢占优先级为1,响应优先级为2,中断8(外部中断2)的抢占优先级为0,响应优先级为2,则三个中断优先级为:中断8 > 中断3 > 中断7。
4.按键检测原理
简单的独立按键连接电路原理图如下所示
独立按键电路中,按键一边接GND,另一边接到单片机IO口上,当按键按下时候,按键两边1和2导通,单片机P2.5引脚直接连接GND,电平为低电平,所以只需要让单片机不断的检测P2.5引脚的I/O口是否为低电平,一旦程序检测到I/O口引脚变为低电平说明按键按下了。
4. 硬件设计
本次按键实验按键部分原理图如下,按键一端引脚均接地,另一端接到单片机PB4,当按键按下时候PB4为低电平。
实物图如下所示:
其中,PB12引脚输出低电平可以点亮LED灯,当按键按下时候,单片机检测到下降沿中断,PB4引脚为低电平,点亮LED灯。
二、实例
1. 新建工程
使用STM32CubeMX创建一个新的工程,参考环境搭建章节配置方式,设置RCC和PB12引脚输出,PB4为GPIO_EXIT4
设置中断触发方式为下降沿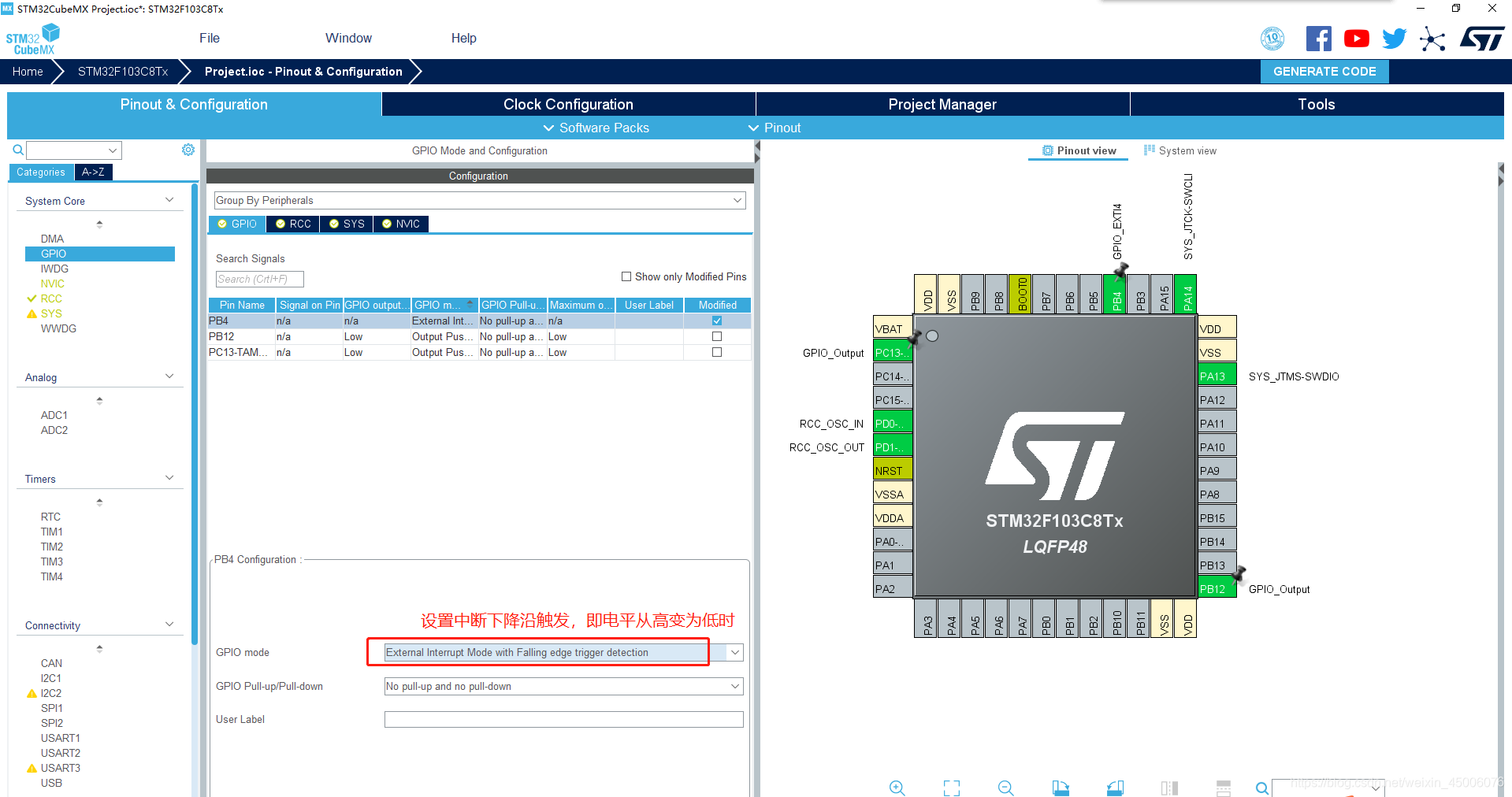
使能NVIC配置中断优先级分组4,并使能EXIT line4中断,GPIO设置抢占优先级为2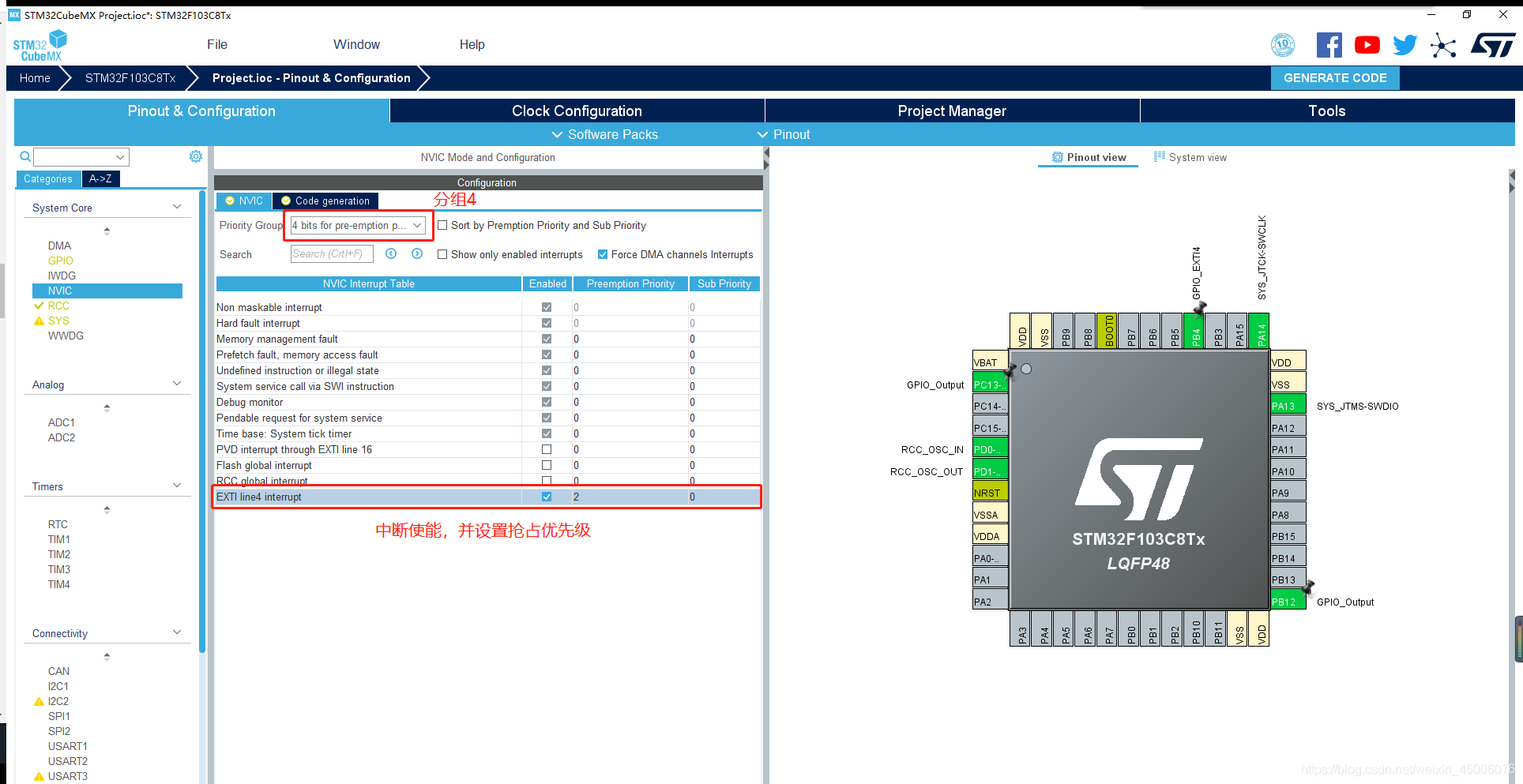
进入Clock configuration页面,选择HSE时钟源,倍频后主时钟为72MHz
切换到Project Manager栏目,设置工程名字、工程保存目录、工具链等信息,具参数如下图所示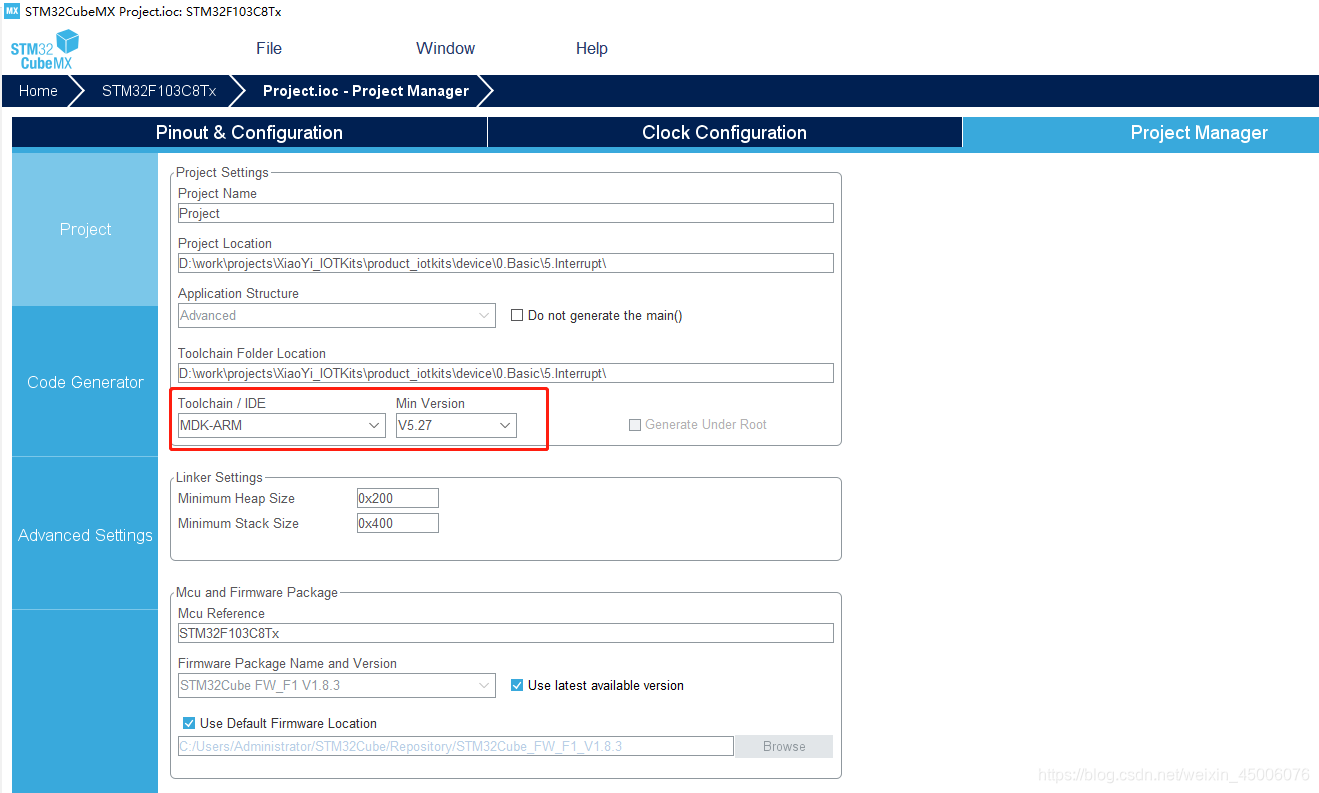
点击左边栏目Code Generator,然后勾选Generate peripheral initialization as a pair of ‘.c/.h’ files per peripheral,勾选此选项,外设将单独保存在一个文件中,而不是全部都在main.c中。
2.函数说明
(1) 首先查看下gpio.c中MX_GPIO_Init()函数
void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, GPIO_PIN_RESET);
/*Configure GPIO pin : PC13 */
GPIO_InitStruct.Pin = GPIO_PIN_13;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
/*Configure GPIO pin : PB12 */
GPIO_InitStruct.Pin = GPIO_PIN_12;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/*Configure GPIO pin : PB4 */
GPIO_InitStruct.Pin = GPIO_PIN_4;
GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* EXTI interrupt init*/
HAL_NVIC_SetPriority(EXTI4_IRQn, 2, 0);
HAL_NVIC_EnableIRQ(EXTI4_IRQn);
}
在GPIO初始化函数中,首先使能GPIOB时钟,然后初始化PB12 PB13为输出模式,PB4为输入模式,中断操作NVIC配置中断优先级,并使能EXTI4_IRQn中断;EXTI是外部中断/事件控制器,一共管理20个中断/事件线,每个中断/事件线都对应一个边沿检测器,可单独配置为中断或者事件,中断/事件线具体对应关系如下: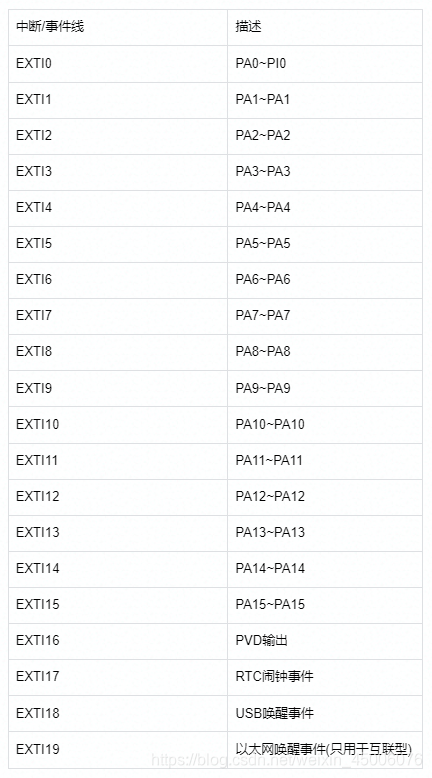
(2) 中断处理函数
当中断来临时候,会进入上文中断向量表对应的void EXTI4_IRQHandler(void)函数,函数在stm32f1xx_it.c中
/**
* @brief This function handles EXTI line4 interrupt.
*/
void EXTI4_IRQHandler(void)
{
/* USER CODE BEGIN EXTI4_IRQn 0 */
/* USER CODE END EXTI4_IRQn 0 */
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_4);
/* USER CODE BEGIN EXTI4_IRQn 1 */
/* USER CODE END EXTI4_IRQn 1 */
}
打开stm32f1xx_hal_gpio.c,HAL_GPIO_EXTI_IRQHandler(uint16_t GPIO_Pin)定义如下:
/**
* @brief This function handles EXTI interrupt request.
* @param GPIO_Pin: Specifies the pins connected EXTI line
* @retval None
*/
void HAL_GPIO_EXTI_IRQHandler(uint16_t GPIO_Pin)
{
/* EXTI line interrupt detected */
if (__HAL_GPIO_EXTI_GET_IT(GPIO_Pin) != 0x00u)
{
__HAL_GPIO_EXTI_CLEAR_IT(GPIO_Pin);
HAL_GPIO_EXTI_Callback(GPIO_Pin);
}
}
/**
* @brief EXTI line detection callbacks.
* @param GPIO_Pin: Specifies the pins connected EXTI line
* @retval None
*/
__weak void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
/* Prevent unused argument(s) compilation warning */
UNUSED(GPIO_Pin);
/* NOTE: This function Should not be modified, when the callback is needed,
the HAL_GPIO_EXTI_Callback could be implemented in the user file
*/
}
当确认外部中断线4发生中断时候,系统会调用HAL_GPIO_EXIT_Callback(uint16_t GPIO_Pin)函数,该函数为一个__weak函数,用户可以在应用层重写该函数,如果用户忘记定义了,系统也不会报错,会进入这个__weak函数,但是什么也不执行
3. 修改程序
在gpio.c中重定义 void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)函数
volatile int key_flag= 0;
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
// 按键按下
key_flag = 1;
}
在main.c中根据中断处理函数标志位,做进一步处理,当按键按下时候按键标志清零,翻转LED灯
/* USER CODE BEGIN 0 */
extern volatile int key_flag;
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
if ( key_flag )
{
HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_12);
key_flag = 0;
}
HAL_Delay(10);
}
/* USER CODE END 3 */
}
三、下载运行
按照环境搭建章节方式给核心板下载程序,可以看到每次按下按键,红色LED灯点亮或者熄灭。
四、小结
如您在使用过程中有任何问题,请加QQ群进一步交流。
QQ交流群:906015840 (备注:物联网项目交流)
源码获取:关注公众号,回复xiaoyi_stm32kits获取资料
硬件获取:某宝搜索小驿物联
小驿物联出品:宁愿做过了后悔,也不要后悔没去做!

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 0
0 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)