基于OpenCV计算机视觉技术的车道检测系统
摘要:本文介绍了一种基于OpenCV的智能车道检测系统,支持图片、视频和实时摄像头输入,提供标准和增强两种检测模式。系统采用Canny边缘检测和霍夫变换技术,实现车道线识别与跟踪,并具备参数可视化功能。适用于自动驾驶和辅助驾驶场景,通过GUI界面提供直观操作体验,具有多种优化配置选项以满足不同精度和稳定性需求。
·
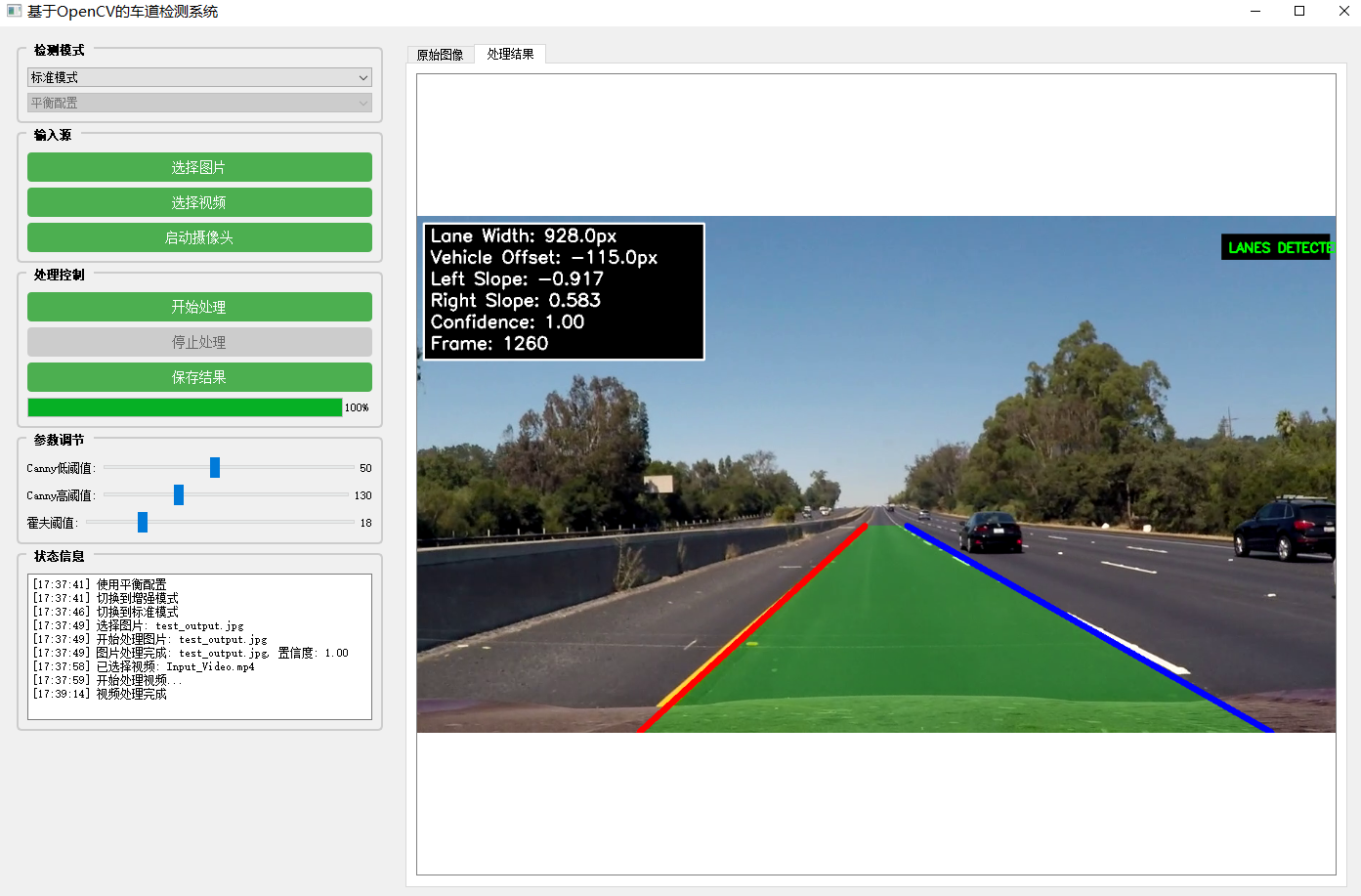
基于OpenCV和计算机视觉技术的智能车道检测系统,能够实时检测和跟踪道路上的车道线。
系统支持图片检测、视频处理和摄像头实时检测,具有标准模式和增强模式两种工作模式,适用于自动驾驶、驾驶辅助系统等应用场景。
主要特性
多种检测模式
标准模式: 使用基础算法配置,适合一般场景
增强模式: 提供三种优化配置(平衡、高精度、高稳定性)
多种输入源支持
图片检测: 支持jpg、png、bmp、tiff、webp等格式
视频处理: 支持mp4、avi、mov、mkv等格式
实时检测: 支持USB摄像头实时车道检测
核心功能
车道线检测: 基于Canny边缘检测和霍夫变换
车道跟踪: 时间序列平滑和稳定性处理
参数可视化: 实时显示车道宽度、车辆偏移等信息 -
GUI界*: 基于PyQt5用户界面
基于OpenCV计算机视觉技术的车道检测系统

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐

 12
12 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)