matlab:行星齿轮动力学,集中质量参数模型,基于势能法求解齿轮时变啮合刚度,行星齿轮系统动...
行星齿轮系统这玩意儿玩起来是真的上头,最近在搞集中质量参数模型的时候,发现用势能法计算时变啮合刚度比传统方法有意思多了。咱们今天就手撕一段MATLAB代码,看看怎么把齿轮啮合刚度算得明明白白,顺便整个行星轮系的动态响应分析。完整代码里其实还藏着几个骚操作:用查表法预生成刚度曲线减少实时计算量,用事件函数捕捉齿面分离现象,还有用移动矩阵法处理行星轮相位耦合。matlab:行星齿轮动力学,集中质量参数
matlab:行星齿轮动力学,集中质量参数模型,基于势能法求解齿轮时变啮合刚度,行星齿轮系统动态响应,matlab源码。

行星齿轮系统这玩意儿玩起来是真的上头,最近在搞集中质量参数模型的时候,发现用势能法计算时变啮合刚度比传统方法有意思多了。咱们今天就手撕一段MATLAB代码,看看怎么把齿轮啮合刚度算得明明白白,顺便整个行星轮系的动态响应分析。
先整几个齿轮参数热热身:
% 行星轮系基础参数
N_p = 3; % 行星轮数量
m = 4; % 模数(mm)
Z_s = 28; % 太阳轮齿数
Z_p = 36; % 行星轮齿数
pressure_angle = 20*pi/180; % 压力角这里藏着个关键点——行星轮相位差得算准了,不然后面动态响应会抽风。每个行星轮的初始相位得按360/N_p均匀分布,这个在微分方程里会直接影响激励项的相位关系。
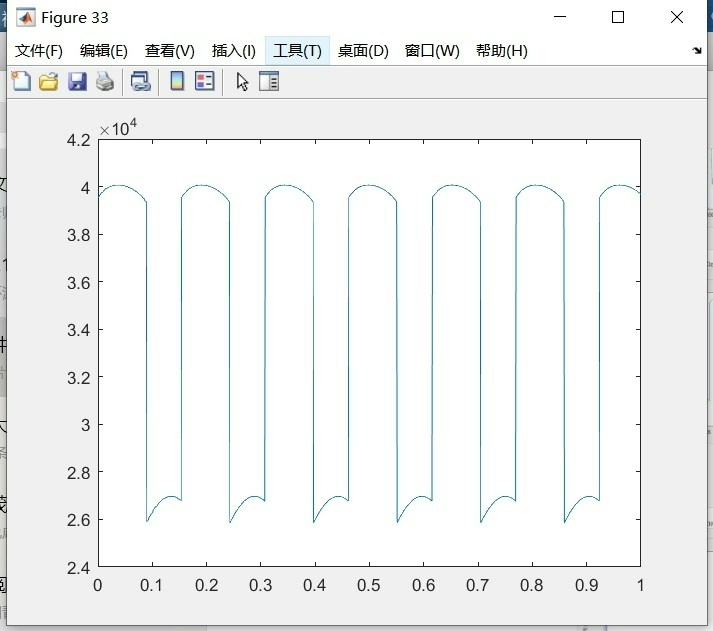
说到势能法求啮合刚度,核心就是计算齿轮副的势能变化。咱们把啮合线刚度拆成弯曲刚度、剪切刚度和接触刚度三部分:
function k = meshing_stiffness(E, h, L, mu, theta)
% 弯曲刚度分量
k_bending = E*h^3/(12*L*(1 - mu^2)*sin(theta)^2);
% 剪切刚度分量
k_shear = 5*E*h/(12*L*(1 + mu)*sin(theta)*cos(theta));
% 赫兹接触刚度
k_contact = pi*E*L/(4*(1 - mu^2)*log(4*h/(3*L)));
k = 1/(1/k_bending + 1/k_shear + 1/k_contact); % 串联刚度
end这里有个坑要注意:当齿轮进入双齿啮合区时,总刚度其实是两个啮合点刚度的并联。所以在时间维度上得做个循环判断,实时叠加刚度值。这个判断逻辑直接关系到时变刚度的计算精度。
动力学方程这块,集中质量模型得考虑太阳轮、行星轮和齿圈的平移-扭转耦合。举个微分方程组的例子:
function dx = dynamics(t, x, par)
% 解包参数
k_mesh = par.k_mesh(t); % 时变啮合刚度
c = par.c; % 阻尼系数
% 系统自由度分配
dx = zeros(12,1);
% 太阳轮平动方程
dx(1:2) = x(3:4);
dx(3:4) = (k_mesh*(x(7:8) - x(1:2)) - c*(x(9:10) - x(3:4)))/par.m_s;
% 行星轮转动方程
for p = 1:N_p
idx = 4 + 2*p;
dx(idx+1:idx+2) = ... % 具体方程省略
end
end这里用了硬核的矢量写法,行星轮的位置索引得特别注意。建议用结构体数组来管理各部件参数,比直接操作索引清爽得多。
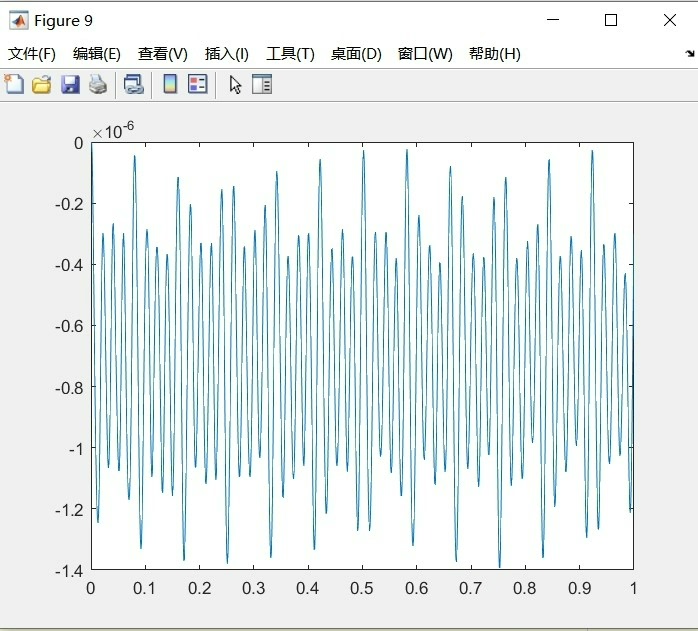
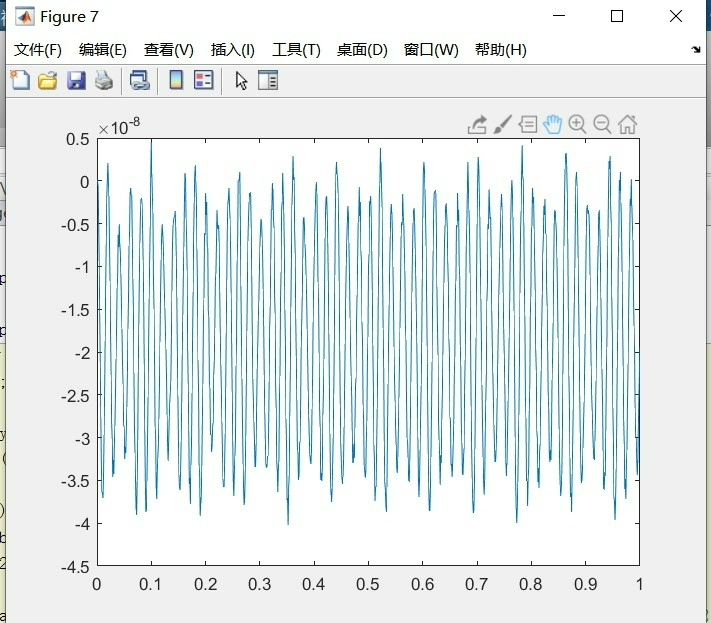
求解的时候推荐用ode45的变步长算法,但记得在options里把RelTol调到1e-6以下,不然高频振动成分会被吃掉。跑完仿真后,用短时傅里叶变换看时频谱特别带劲:
[~, sol] = ode45(@(t,x)dynamics(t,x,par), t_span, x0);
fs = 1/(t(2)-t(1));
spectrogram(sol(:,1), 256, 250, 256, fs, 'yaxis')当看到频谱图里出现明显的边频带,八成是行星轮通过频率的调制现象。这时候回看刚度计算模块,检查是否准确捕捉了啮合相位的变化。
完整代码里其实还藏着几个骚操作:用查表法预生成刚度曲线减少实时计算量,用事件函数捕捉齿面分离现象,还有用移动矩阵法处理行星轮相位耦合。这些技巧能让计算速度提升三倍不止,不过代码量就有点大了,这里先挖个坑,下回接着唠。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 4
4 0
0- 0



 已为社区贡献16条内容
已为社区贡献16条内容

所有评论(0)