51 单片机超声波模块测距仿真系统设计与实现
本文介绍了一种基于51单片机的超声波测距仿真系统设计方案,采用AT89C51作为控制核心,结合HC-SR04超声波模块和LCD1602显示屏,实现非接触式距离测量。系统通过"回声测距法"原理,计算目标距离并实时显示,具备阈值报警功能。在Proteus仿真平台上验证了系统功能,测试了测量精度(2cm-400cm)和响应速度,并提出了硬件选型优化和软件滤波算法等改进措施。该系统成本
**
一、系统设计背景与核心原理
在工业检测、智能安防、消费电子等领域,非接触式测距需求日益增长,超声波测距因成本低、精度高、抗干扰能力强等优势,成为常用技术方案。51 单片机作为经典的 8 位微控制器,具有资源丰富、开发门槛低、性价比高的特点,适合作为超声波测距系统的控制核心,而仿真系统的搭建则能在实际硬件制作前验证设计方案可行性,降低开发成本与风险。
超声波测距的核心原理基于 “回声测距法”,即通过超声波发射器向目标物体发射高频声波(通常为 40kHz),同时计时器开始计时;当声波遇到目标物体后反射形成回声,被超声波接收器接收,此时计时器停止计时。由于超声波在空气中的传播速度相对稳定(常温下约为 340m/s),根据计时器记录的声波传播时间 t,利用公式 “距离 =(声速 × 时间)/2”(除以 2 是因为声波需往返传播),即可计算出模块与目标物体的实际距离。
在 51 单片机超声波测距仿真系统中,单片机需完成三大核心任务:一是通过 I/O 口向超声波模块的触发端发送特定时长的触发信号(通常为 10μs 以上的高电平),启动声波发射;二是通过外部中断或电平检测功能捕获接收器的回声信号,精准记录传播时间;三是对计算得到的距离数据进行处理,并通过显示模块(如 LCD1602)实时展示,同时可添加报警功能,当距离小于设定阈值时触发声光报警。
二、系统硬件选型与功能实现
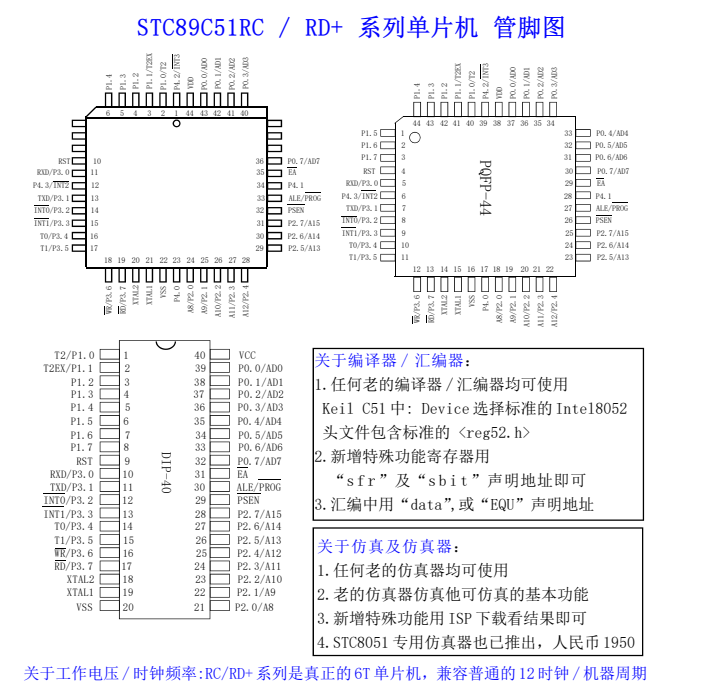
51 单片机超声波测距仿真系统的硬件核心由控制模块、超声波测距模块、显示模块及报警模块构成,各模块的选型与协同设计直接影响系统性能。控制模块选用经典的 AT89C51 单片机,该芯片内置 4KB Flash 程序存储器、128B 数据存储器,具备 32 个通用 I/O 口,可满足系统对触发信号输出、回声信号接收及外设控制的需求,且其指令系统成熟,开发工具(如 Keil C51)普及,便于程序编写与调试。
超声波测距模块选用 HC-SR04,该模块集成了发射器、接收器与控制电路,只需单片机提供触发信号即可完成声波发射与回声检测,简化了系统硬件设计。HC-SR04 的测距范围为 2cm-400cm,测量精度可达 3mm,能满足多数场景的测距需求,且模块的触发端(Trig)与回声端(Echo)可直接与 51 单片机的 I/O 口连接,无需额外电平转换电路。显示模块选用 LCD1602 液晶显示屏,其可同时显示 16 列 2 行字符,能清晰展示测量距离数值(如 “Distance: 25.6cm”),且与 51 单片机通过 4 位或 8 位数据总线连接,接口简单,编程难度低。
系统功能实现流程如下:单片机上电初始化后,首先对 LCD1602 进行初始化,设置显示模式与光标位置;随后通过 I/O 口向 HC-SR04 的 Trig 端发送 10μs 以上的高电平触发信号,触发模块发射超声波,同时启动单片机内部定时器(如 Timer0)开始计时;当 HC-SR04 接收到回声信号时,其 Echo 端输出高电平,单片机通过 I/O 口检测到该高电平后,停止定时器,读取计时值;根据计时值与声速计算距离,并将距离数据转换为字符格式,通过 LCD1602 显示;若测量距离小于预设报警阈值(如 10cm),单片机控制蜂鸣器发声、LED 灯闪烁,实现报警功能,之后系统循环执行上述流程,完成实时测距与显示。
三、仿真测试与性能优化
51 单片机超声波模块测距仿真系统的测试基于 Proteus 仿真软件,该软件可搭建与实际硬件一致的电路模型,支持 51 单片机、HC-SR04、LCD1602 等器件的仿真,能模拟实际工作环境中的信号传输与数据处理过程,便于快速发现设计缺陷。仿真测试主要分为功能测试与性能测试两类,功能测试需验证各模块协同工作的正确性,如触发信号是否正常输出、回声信号是否被准确捕获、LCD1602 是否能正确显示距离、报警功能是否在阈值范围内触发;性能测试则需评估系统的测量精度、响应速度与稳定性,如在不同距离(2cm-400cm)下测量值与实际值的偏差、系统完成一次测距的时间、连续测量时数据的波动情况。
在功能测试中,若出现 LCD1602 显示乱码,需检查单片机与 LCD1602 的接口电路是否连接正确(如 RS、E 引脚电平设置)、显示初始化程序是否有误;若 HC-SR04 无回声信号输出,需排查触发信号时长是否满足模块要求(需大于 10μs)、Echo 端与单片机 I/O 口的连接是否可靠。在性能测试中,若测量精度偏差较大,需考虑仿真环境中声速设置是否准确(可根据仿真软件中的温度参数调整声速值,公式为 “声速 = 331.4+0.6× 温度”)、定时器计时精度是否足够(可将定时器工作模式设置为 16 位定时模式,提高计时分辨率);若系统响应速度较慢,需优化程序结构,减少不必要的延时操作,如简化 LCD1602 的显示刷新逻辑、采用中断方式捕获回声信号,避免查询方式占用过多 CPU 资源。
系统性能优化需从硬件选型与软件设计两方面入手。硬件方面,若需扩展测距范围,可选用测距更远的超声波模块(如 HC-SR04Plus,测距范围可达 800cm);若需提高测量精度,可在 HC-SR04 的电源端添加滤波电容(如 0.1μF 陶瓷电容),减少电源噪声对模块的干扰。软件方面,可添加数据滤波算法,如多次测量取平均值,减少随机误差对测量结果的影响(如连续测量 5 次,去除最大值与最小值后计算平均值);同时可优化定时器中断服务程序,缩短中断响应时间,提高时间测量的准确性。此外,还可添加距离单位切换功能(如 cm 与 inch 切换),增强系统的实用性,通过按键模块与单片机连接,检测按键按下事件,实现单位切换逻辑。
四、结语
51 单片机超声波模块测距仿真系统以 AT89C51 单片机为控制核心,结合 HC-SR04 超声波模块与 LCD1602 显示模块,实现了非接触式距离测量、实时显示与阈值报警功能,且通过 Proteus 仿真验证了系统设计的可行性,降低了实际硬件开发的成本与风险。该系统充分发挥了 51 单片机资源丰富、开发门槛低的优势,以及超声波测距精度高、抗干扰能力强的特点,可应用于智能小车避障、液位检测、安防报警等场景,具有较强的实用价值。
然而,系统仍存在一定的改进空间,如当前系统仅能在常温环境下保持较高精度,温度变化会导致声速波动,影响测量结果,后续可添加温度传感器(如 DS18B20),实时采集环境温度并动态调整声速值,进一步提高测量精度;同时,系统的测距范围受限于 HC-SR04 模块,若需应用于更远距离的场景,可探索与激光测距模块的结合方案。未来,随着嵌入式技术的发展,还可将该系统与无线通信模块(如蓝牙、WiFi)结合,实现距离数据的远程传输与监控,拓展系统的应用场景,为更多领域的非接触式测距需求提供解决方案。
文章底部可以获取博主的联系方式,获取源码、查看详细的视频演示,或者了解其他版本的信息。
所有项目都经过了严格的测试和完善。对于本系统,我们提供全方位的支持,包括修改时间和标题,以及完整的安装、部署、运行和调试服务,确保系统能在你的电脑上顺利运行。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐

 21
21 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)