新手ubuntu+igh主站+零差云控电机调试(3)
在控制电机运动之前,需要调试电机,具体步骤如下~
真是十分火速的更新!这篇就是开始调整电机参数
本篇参考零差云控的eRob机器人关节模组用户手册_V3.37
试运行电机
1.空载测试
安装上位机软件后打开软件,将电机与上位机通过USB转CAN连接。
点击连接设置,打开连接界面;点击连接测试,等待扫描结束;点击加入列表;点击列表中的已加入的设备;点击连接;连接成功,并显示关节 CAN ID等参数。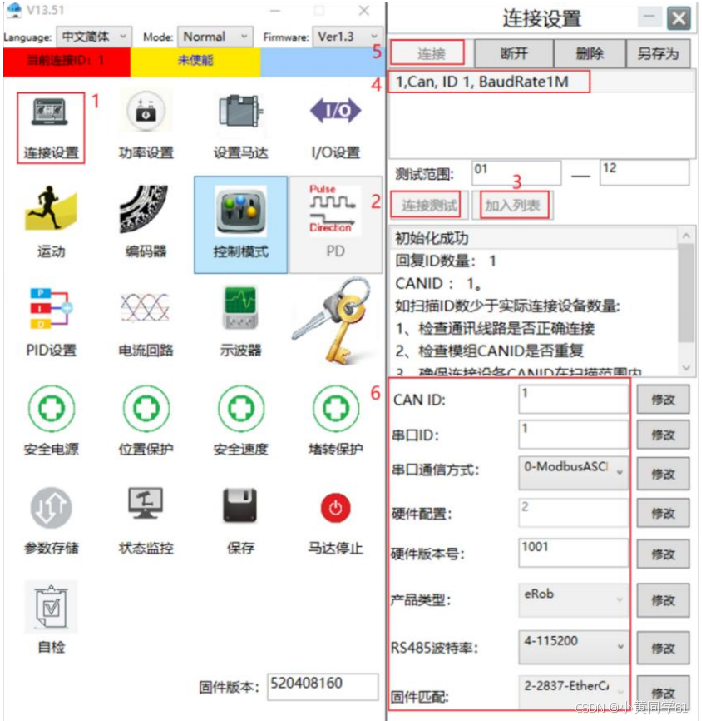
点击“使能”按钮电机使能并自动打开刹车。
关节输出端的当前位置显示和速度参数设定,数值是以编码器分辨率为单位。加加速度是设置加速度从0 到达设定加速度的时间(设置值越大越接近 S 型速度曲线,越小越接近 T 型速度曲线),默认设定 50us,停止时间是设置点对点往返运动折返时的停留时间。
设定目标位置,使电机运动至目标位置,勾选往返使电机在当前位置与目标位置之间往返运动。
设定相对运动位移值,使电机向前或向后移动一段设定的位移值,勾选往返使电机在当前位置以设定的位移做往返运动。
不勾选持续时点击“向前”或“向后”点动运动,勾选持续后点击“向前”或“向后”按钮使电机连续运动。
以设定减速度减速停止,但电机不失能,刹车不会制动。
限速功能:“应用加减速限制所有运动”勾选时,关节运动同时受限于运动界面设定的加减速度、速度限制以及安全速度界面设定的最大允许速度限制,当运动界面的“应用加减速限制所有运动”不勾选时,关节运动仅受限于安全速度界面设定的最大允许速度限制
电机空载试运行步骤:
1、核对速度参数不超过最大允许速度(查看安全速度界面),建议一开始请先设定低转
速运行。
2、运动先点击使能,确认刹车已打开(刹车打开会有“哒”的一声)。
3、点击持续运动中的“向前”,电机向前运动,观察电机运行状态。
4、点击停止,电机减速停止(注:运行中不可以直接点击主界面的马达停止)。
5、点击软件主界面中的马达停止,电机失能刹车制动,试运行完毕。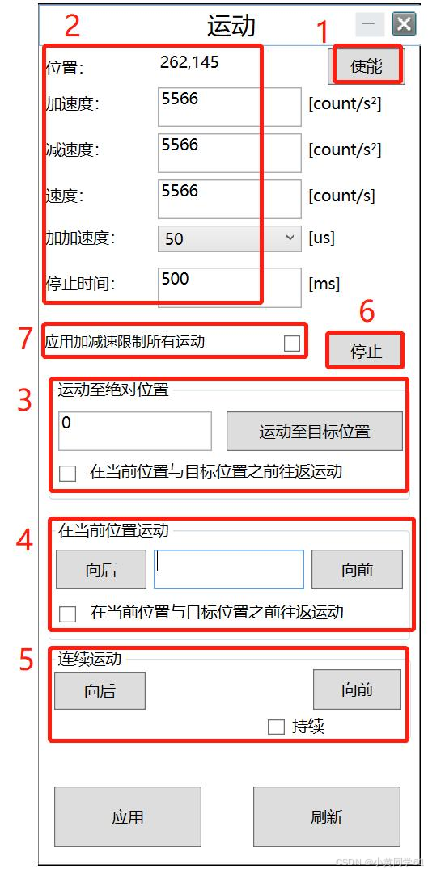
2.带负载的PID整定
速度环调节
进行PID整定前,需先确认所示参数,控制模式界面“运行模式”应设置为“位置控制”,
“控制源”设置为“0-不使用”,需在关节下使能状态下进行设置(在主界面点击“马达
停止”按钮则关节下使能),设置完后点击界面下方“应用”按钮立即生效,否则关节
将不会运转。
进行PID整定前,应先将负载位置调整到合适位置,例如关节水平安装(输出轴
轴心与地面平行时),负载位置应尽量调整到竖直位置(即负载力臂方向与地面垂直)
,然后再进行PID整定。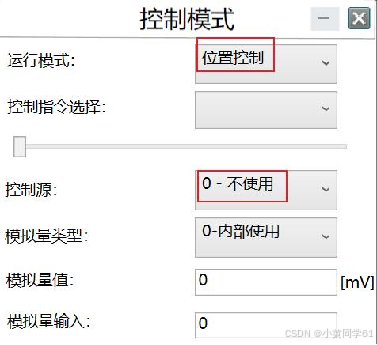
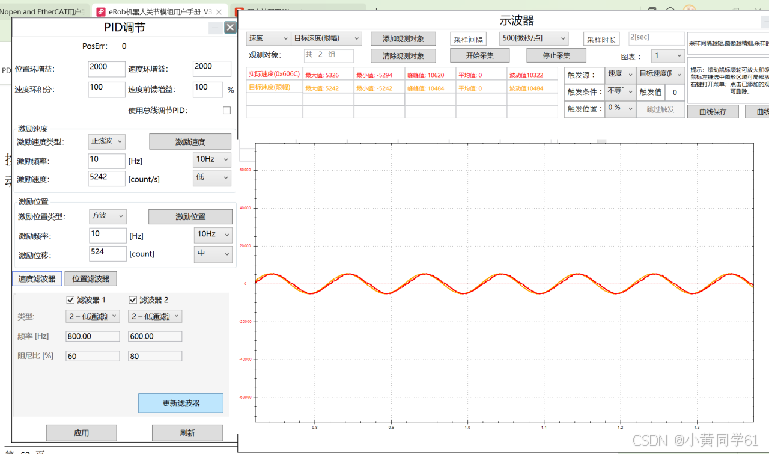
首先在示波器界面选择目标速度(限幅)、实际速度为观察源,采样间隔为 500 微秒/点,采样时长为 2s,以目标速度(限幅)作为触发源,触发条件为不等于 0 且触发位置选择在 0%,并点击“开始采集”按钮,使示波器处于“等待触发”状态。
在 PID 设置界面(如图 15-3)设置速度环激励速度类型为方波,激励频率,推荐使用1Hz,激励速度一般设定为(524288/减速比),PID 在原有基础值上去调节,点击“激励速度”按钮;此时电机会响应跟随激励速度且示波器会进行数据采集。
先调整增益,波形在刚好超调一点,但是未出现过大的震荡即可。然后调节积分,积分数值一般不用给太高,适当消除震荡即可。
速度环激励类型可选择正弦波激励再次验证。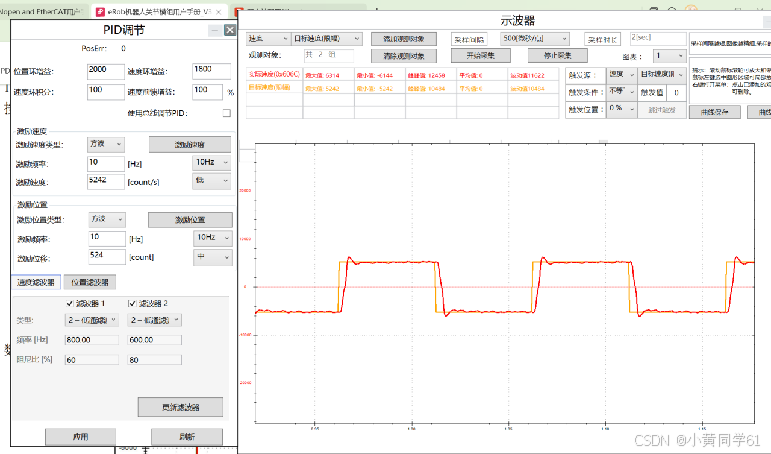
【注意】在这里只能调整这四个参数,位置环增益可以看成是比例系数,速度环增益可以看成积分系数,速度环积分就是积分系数。
位置环调节
首先在示波器界面选择目标位置(限幅)、实际位置为观察源,采样间隔为 500 微秒/点,采样时长为 2s,以目标速度(限幅)作为触发源,触发条件为不等于 0 且触发位置选择在 0%,并点击“开始采集”按钮,使示波器处于“等待触发”状态。
在 PID 设置界面设置激励频率,推荐使用 1Hz,激励位置一般设置为(52428/减速比),PID 在原有基础值上去调节,点击“激励位置”按钮;此时电机会响应跟随激励位置且示波器会进行数据采集。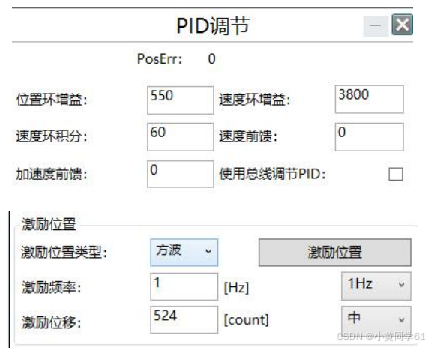

调整增益,最终波形应该接近方波波形。
调节完毕后,主界面点击“马达停止”按钮,然后在 PID 设置界面左下角点击“应用”按钮,并在主界面中点击“保存”按钮用于将参数进行保存(约 3s 后保存完成),以防止驱动器重启后还原为原来参数。
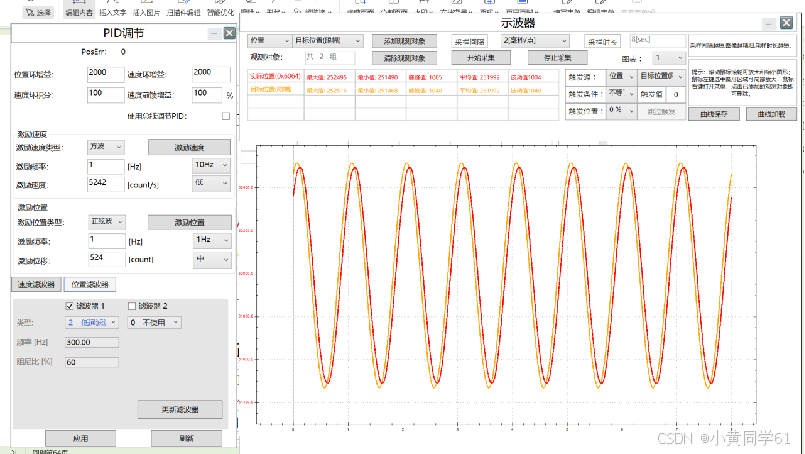
速度环激励类型可选择正弦波激励,正弦波激励最终波形应该接近波形。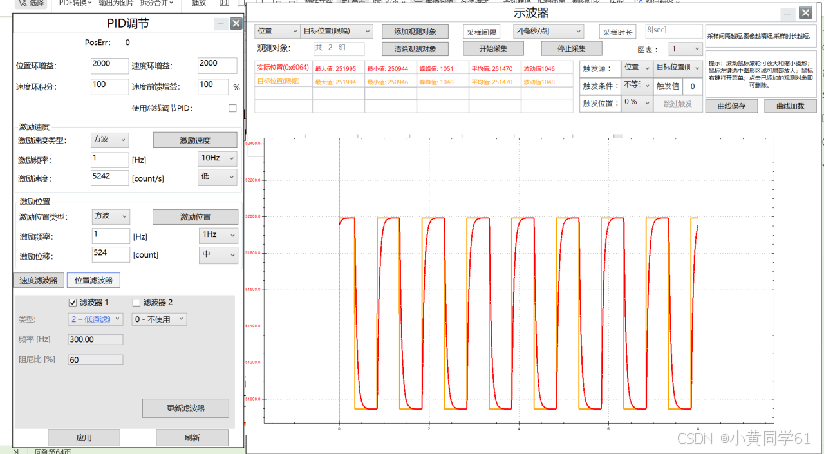
(本以为到这里就调试完了,结果并没有…)
位置保护设置
【注意】需要设置改功能
【注意】参考说明书【eRob机器人关节模组用户手册_V3.37】的9.6节
【注意】任何设置之后,一定点保存
1.连接测试软件eTurner,设定运行范围,机械零位(0°)对应的编码器位置为 262144。
2.根据说明书给出的示例进行计算,在这里假设运行范围为±60°。
下限设定值:262144-87384=174760,
上限设定值:262144+87384=349528
3.打开上位机,打开“位置保护”界面,设置位置限制:从(下限
设定值)到(上限设定值),然后点击应用、保存。
4.也要设定最大允许位置误差、软位置误差。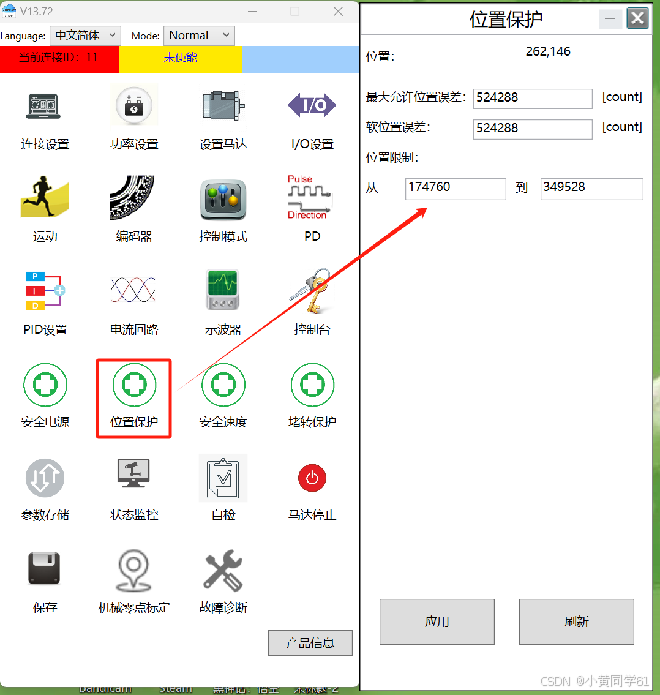
安全速度设定
【注意】需要在运行之前设定
【注意】建议先设定转角范围后,再推算速度
【注意】参考说明书【eRob机器人关节模组用户手册_V3.37】
1.连接测试软件eTurner
2.根据说明书给出的示例进行计算,在这里假设运行范围为±60°,
最大运行速度为15°/s。
则最大允许速度为21846count/s。
3.打开上位机,打开“安全保护”界面,设置:从(最大允许速度)
到(最大允许速度误差),然后点击应用、保存。
4.也要根据最大允许速度,在“运动”界面中改变运行速度。
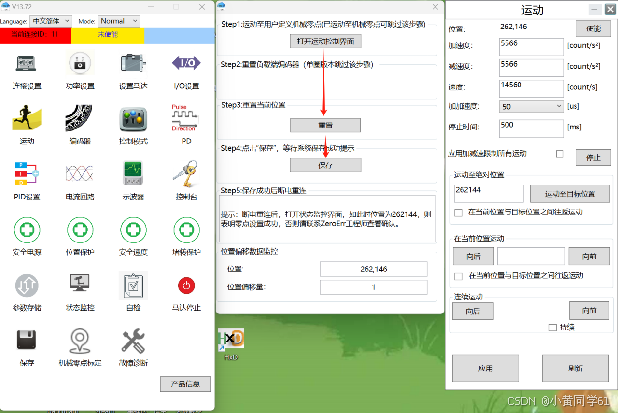
机械零点标定
【注意】需要在运行之前设定
【注意】参考说明书【eRob机器人关节模组用户手册_V3.37】的9.5.1节
1.连接测试软件
2.选择“机械零点标定”,根据步骤进行设置
3.打开“运动控制”界面,“运动至目标位置”设置为机械零点的数值(262144),
进行“运动至目标位置”,点击“使能”,电机运动。
4.重置当前位置
5.保存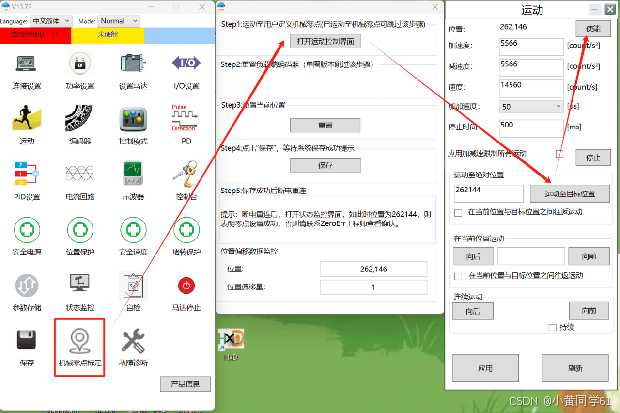
【注意】这里不机械调零的话,会报错0x1288,就是机械调零的问题。
运行电机
将电机通过Ethercat线将电机与上位机连接。
运行主站,检查是否检测到从站。
运行主站
`sudo /etc/init.d/ethercat start
检查主站
sudo ethercat master
输入指令,设置电机运动模式。
调整模式
sudo ethercat states -p 0 OP
如有错误,恢复初始状态
udo ethercat states -p 0 PREOP
编译控制代码,运行控制代码,即可控制电机。
ps:真是一篇非常好的文章,剩下的控制代码还没有看懂,双电机控制还没有实现,可能就暂时告一个段落~

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 44
44 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)