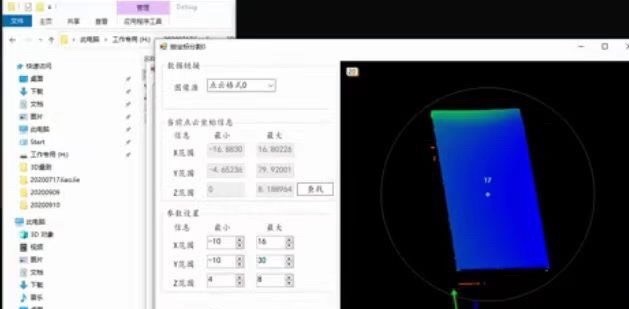
工业视觉圈子里最近总有人问,怎么把Halcon的3D点云处理能力塞进C#开发的系统里。今天咱们就聊聊这个实战场景,直接上硬菜
最后给个忠告:Halcon的3D模块在C#里调用时,异常处理一定要做足。玩Halcon的老手都知道,它的HDevelop环境处理点云确实溜,但真要集成到C#里还得花点心思。假设咱们已经用激光扫描仪搞到了点云数据,现在要在C#里调用Halcon做平面拟合计算。别被官方文档吓到,多试错多调参,车间里那些平面度、圆柱度、位置度的检测需求,基本上都能摆平。说到3D测量,绕不开距离计算。halcon点云测量
halcon点云测量软件,3D测量软件,C#联合halcon视觉系统,通用视觉软件,通用点云处理软件,测量软件,3D视觉检测系统
玩Halcon的老手都知道,它的HDevelop环境处理点云确实溜,但真要集成到C#里还得花点心思。先看个典型场景:产线上检测金属件的平面度。假设咱们已经用激光扫描仪搞到了点云数据,现在要在C#里调用Halcon做平面拟合计算。
上代码之前记得引用HalconDotNet命名空间,这个dll文件一般在安装目录的bin\dotnet35里。咱们先搞个最简单的平面拟合示例:
using HalconDotNet;
void FitPlane(string cloudPath)
{
HObject pointCloud = HOperatorSet.ReadObject(cloudPath);
HTuple planeParams = new HTuple();
HTuple confidence = new HTuple();
HOperatorSet.FitPrimitivesObjectModel3d(
pointCloud,
"primitive_type", "plane",
"result_type", "primitive_parameters",
out planeParams,
out confidence);
double nx = planeParams.TupleSelect(0).D; // 法向量分量
double ny = planeParams.TupleSelect(1).D;
double nz = planeParams.TupleSelect(2).D;
double distance = planeParams.TupleSelect(3).D;
Console.WriteLine($"平面方程:{nx}x + {ny}y + {nz}z = {distance}");
}这段代码里有个魔鬼细节——FitPrimitivesObjectModel3d这个算子,它其实是个瑞士军刀,把"primitivetype"参数换成cylinder就能拟合圆柱体。不过实测中发现点云质量差的时候,记得加上maxnum_iterations参数限制迭代次数,否则可能在车间环境里卡死。
再说说内存管理这个坑。Halcon的HObject在C#里必须手动释放,不然分分钟内存泄漏。建议用using语句包着:
using (HDevEngine engine = new HDevEngine())
{
using (HObject cloud = HOperatorSet.GenObjectModel3dFromPoints(xArr, yArr, zArr))
{
// 处理逻辑
}
}遇到点云配准的需求也别慌,Halcon的RegisterObjectModel3dPair算子配合C#多线程能玩出花。上次给汽车厂做零部件检测,就是靠这招把扫描的点云和CAD模型对齐。关键代码长这样:
HType pose = new HType();
double score;
HOperatorSet.RegisterObjectModel3dPair(
modelObject3D,
sceneObject3D,
"num_levels", 5,
"max_num_iterations", 200,
"pose_out", out pose,
"score", out score);这里有个骚操作——把num_levels设成动态值,根据点云密度自动调整配准精度。实测发现当点间距超过0.1mm时,level降到3层反而更稳定。
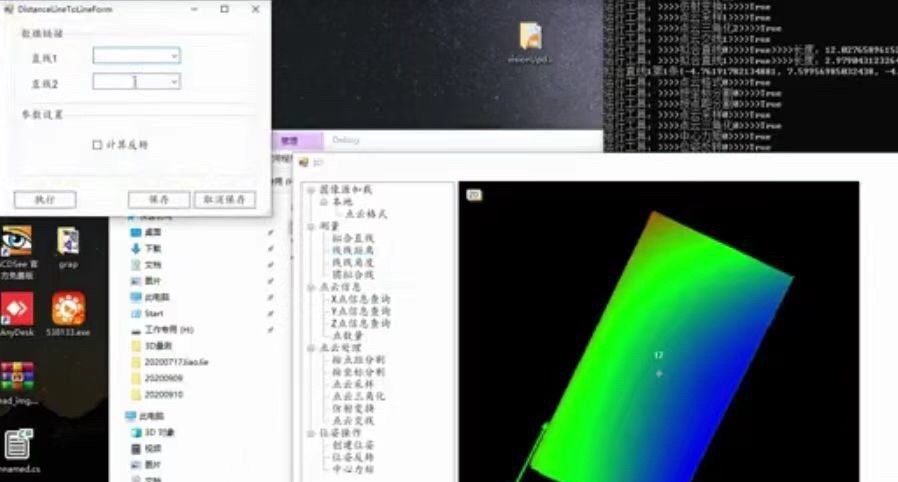
说到3D测量,绕不开距离计算。Halcon的DistanceObjectModel3d算子能直接输出点云到平面的距离分布。但要注意点云的法向量必须提前计算好,不然结果会抽风:
HOperatorSet.SurfaceNormalsObjectModel3d(
objectModel3D,
"mls",
new HTuple(0.03),
out HObjectModel3D normalsModel);这里用移动最小二乘法(mls)平滑法向量,0.03的参数适合大多数机加工件。要是检测铸造件这种粗糙表面的,得调到0.1以上才hold得住。
最后给个忠告:Halcon的3D模块在C#里调用时,异常处理一定要做足。特别是当点云数据量超过百万级时,建议用异步调用+进度回调,别让UI线程卡死。见过最狠的bug是产线工人连续快速点击测量按钮,直接把工控机搞蓝屏了——所以现在我们的代码里都加了操作锁,像这样:
private readonly object _halconLock = new object();
void SafeHalconOperation(Action operation)
{
lock (_halconLock)
{
try
{
operation();
}
catch (HOperatorException ex)
{
// 记录错误编号和消息
Logger.Error($"Halcon错误 {ex.GetErrorCode()}: {ex.Message}");
}
}
}说到底,Halcon的3D功能在C#里用好了真是生产力大杀器。别被官方文档吓到,多试错多调参,车间里那些平面度、圆柱度、位置度的检测需求,基本上都能摆平。下次有机会再聊聊怎么用Halcon做点云分割,那又是另一个刺激战场了。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐
 4
4 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)