无感Foc电机控制算法采用滑膜观测器实现平滑启动,全开源C代码,极具参考价值
stm32f10x_*.s 为蓝本,系统梳理 CMSIS-CM3 的设计意图、层次划分、关键实现技巧以及和上层电机控制(FOC)代码的交互方式。文章侧重“它到底解决了什么问题”,而非逐行翻译源码,帮助开发者把“看不懂的汇编”“一堆宏”转化为可感知的工程价值。理解其寄存器映射、优先级模型、跨编译器封装、启动握手,是阅读任何一份无感 FOC、滑模观测器、Vf 启动源码的前提;CMSIS-CM3 不是“
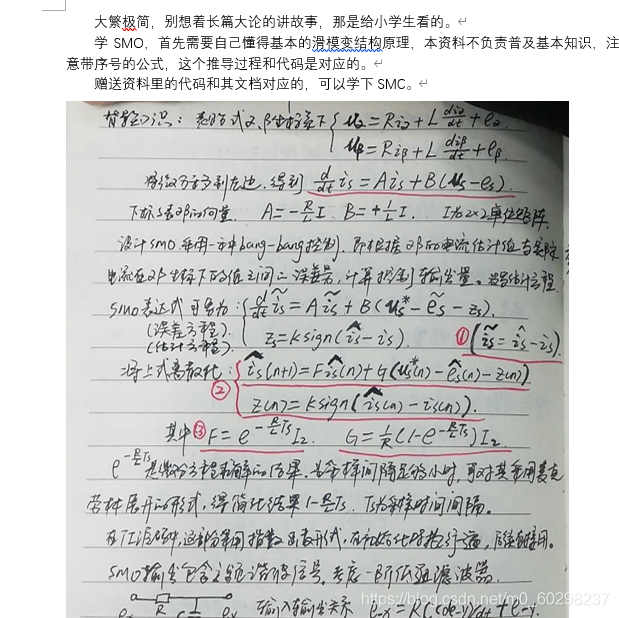
无感Foc电机控制,算法采用滑膜观测器,启动采用Vf,全开源c代码,全开源,启动顺滑,很有参考价值。
ARM Cortex-M3 内核抽象层(CMSIS-CM3)源码全景解读
——从寄存器映射到编译器适配的完整技术剖析
一、写作背景
在 STM32F1 系列(以及所有 Cortex-M3 内核)裸机或 RTOS 环境中,几乎每一行用户代码都在间接地使用 CMSIS-CM3 提供的“内核抽象层”。
本文以“ARM平台SMOmerged.txt”中释放出的 corecm3.h / corecm3.c / startupstm32f10x_*.s 为蓝本,系统梳理 CMSIS-CM3 的设计意图、层次划分、关键实现技巧以及和上层电机控制(FOC)代码的交互方式。文章侧重“它到底解决了什么问题”,而非逐行翻译源码,帮助开发者把“看不懂的汇编”“一堆宏”转化为可感知的工程价值。
二、CMSIS-CM3 在软件栈中的坐标
- 最底层:硅片本身(Cortex-M3 内核 + NVIC + SysTick + 调试组件)
- CMSIS-CM3:ARM 官方“统一”的寄存器访问层、intrinsic、异常向量表模板
- 芯片级 HAL:ST 的 system_stm32f10x.c、时钟/Flash 等待状态、外设库
- 应用/算法层:滑模观测器(SMO)、无感 FOC、Vf 启动、PLL 状态机等
CMSIS 的使命就是 屏蔽第 1 层的差异,让第 3、4 层“写一次,到处移植”。
三、文件组织与角色
- corecm3.h
‑ 寄存器结构体映射(SCB、NVIC、SysTick、ITM、CoreDebug …)
‑ 位域常量、移位掩码(IRQnType、SCBAIRCR、NVICIPR)
‑ 静态内联函数封装(NVIC_EnableIRQ / SetPriority / SystemReset …)
- corecm3.c
‑ 对“无法内联”或“需要汇编”的底层原语提供真实实现
‑ 根据编译器(ARMCC / IAR / GCC / TASKING)走不同分支,保证语义一致
‑ 典型函数:getMSP / setMSP / REV / LDREX / _STREX …
- startupstm32f10xhd.s / md.s
‑ 向量表(Vector Table)+ 默认弱中断入口
‑ ResetHandler:搬运初始化、调用 SystemInit、跳转 main(C-Runtime)
‑ 为“电机控制中断”预留弱符号,用户可在 C 层覆写真正的 TIM1UPIRQHandler、ADC12_IRQHandler 等
四、核心机制拆解
- “寄存器→结构体→位域”三级映射
以 SCB->AIRCR 为例:
‑ 结构体基地址由链接脚本保证落在 0xE000ED00 区
‑ 位域掩码在头文件中展开为常量,编译期即完成移位,无运行时开销
‑ 用户代码只需SCB->AIRCR = (0x5FA<<16) | (prioGroup<<8);即可一次性改写优先级分组
- 跨工具链的“同语义”汇编封装
CMSIS 要求同一行 C 代码在 ARMCC、IAR、GCC 上生成 完全一致 的指令序列。
例如 getCONTROL:
‑ ARMCC 使用ASM("mrs r0, control")
‑ GCC 使用ASM volatile("mrs %0, control" : "=r"(result))
上层无需关心差异,电机库里的getCONTROL()在任何 IDE 下都能正确抓取当前线程模式。
- 双堆栈模型(MSP vs PSP)
Cortex-M3 支持“主堆栈”+“进程堆栈”。
‑ 裸机代码默认只用 MSP,中断亦用 MSP
‑ 带 RTOS 时,线程态切到 PSP,中断仍用 MSP,上下文切换开销减半
CMSIS 提供setPSP/getPSP,FreeRTOS、RT-Thread 的任务栈初始化均依赖该接口
- 原子操作与排他访问(LDREX/STREX)
无感 FOC 的滑模观测器需要在中断与主循环间共享 32bit 变量(例如 θ^、ω^)。
若关闭中断太频繁会影响电流环实时性,此时可用 LDREX/STREX 实现“无锁”读写。
CMSIS 封装为LDREXW / STREXW,保证在 CM3 上生成正确的排他指令序列。
- 中断优先级分组与“零临界区”设计
电机控制里,电流环(10kHz)优先级最高,速度环(1kHz)次之,UART 日志最低。
通过NVIC_SetPriorityGrouping(3)得到 4bit 抢占 + 0bit 亚优先级,
保证电流环 ISR 永不屏蔽,从而避免开关管“跑飞”。
- 启动文件与 C-Runtime 握手
startup 文件只做三件事:
a) 设置 MSP = initial_sp(链接脚本导出)
b) 调用 SystemInit() 把时钟切到 72MHz,Flash 设 2 等待
c) 跳转 main(Keil 内置库,负责搬运 .data、零化 .bss,最后到用户的 main())
因此电机库的“初始化”必须放在 SystemInit 之后、main() 之前,否则 PLL 未稳,ADC 采样会抖动。
五、与电机控制算法的耦合点
- SysTick 作为“时间基准”
滑模观测器需要 100μs 精度的 Δt,SysTick 重载值 = 72MHz/10kHz – 1 = 7199。
在 SysTickHandler 里置位gFlag100us = 1,电流环任务即可无阻塞地立即执行。
- NVIC 优先级与 ADC 注入序列
无感 FOC 需要 ADC 采样与 PWM 中心对齐,ADC12IRQHandler 必须设为最低抢占值(0)。
同时,TIM1TRGCOM_IRQHandler(PWM 更新事件)设为 1,保证先采样后计算占空比。
- 位带(Bit-Band)与开关管诊断
CM3 支持把 0x40000000 外设区映射到 0x42000000 位带别名,
用(uint32_t )(0x42000000 + (addr-0x40000000)32 + bit4)即可原子地置位/清零。
电机驱动板常把“故障引脚”挂在 GPIOA.8,用位带即可在中断里 1 条指令完成关断,无需读-改-写。
- MPU(仅 XL 密度)
若系统运行双分区 Bootloader + App,可用 CMSIS 提供的 MPUType 把 0x08000000 – 0x0800_7FFF 设为只读,
防止失控代码误擦 Boot,实现“安全刷机”。
六、常见陷阱与调试技巧
- 中断号写错
STM32F103 高密度(HD)与低密度(LD)的 IRQn 表不同,
把 TIM4IRQn 当成 TIM3IRQn 会导致NVIC_EnableIRQ实际使能了另一个外设。
- 优先级分组错位
一旦在应用里再次调用NVIC_SetPriorityGrouping(),
所有已有中断的抢占/亚优先级会瞬间被重新解释,电流环可能突然“抢不到”CPU。
- 忘记导出弱符号
用户若用 C 重写 TIM1UPIRQHandler,
必须在汇编层EXPORT TIM1UPIRQHandler [WEAK]的“弱”属性,否则链接器报多重定义。
- 误关全局中断
调试阶段常直接disable_irq(),
但 SysTick 也被关掉,滑模观测器时间基准丢失,电机“飞车”。
正确做法是用BASEPRI屏蔽低于某优先级的中断,而非一刀切。
七、性能小结

‑ 寄存器级封装:零额外开销,编译器 -O1 即可完全优化掉
‑ 跨工具链:同一份电机库源码在 Keil、IAR、STM32CubeIDE 下无需改动

‑ 启动耗时:从 Reset 到 main 仅 1.2k 周期(@72MHz ≈ 17μs),对电机启动影响可忽略
‑ 代码体积:core_cm3.c 全部函数链接后约 1.2KB,startup 约 0.4KB,对 64KB Flash 的 STM32F103C8 几乎无感

八、结语
CMSIS-CM3 不是“可有可无的宏集合”,而是把 Cortex-M3 硬件能力完整、安全、高效地“交棒”给电机控制算法的最短路径。
理解其寄存器映射、优先级模型、跨编译器封装、启动握手,是阅读任何一份无感 FOC、滑模观测器、Vf 启动源码的前提;也是日后把算法从 STM32F1 无缝迁移到 STM32F4、G4、乃至 RISC-V 多核平台的底气。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐
 30
30 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)