改进蚁群算法在路径规划中的探索:融合人工势场的奇妙之旅
通过融合人工势场到蚁群算法的状态转移函数中,我们成功地加快了算法的收敛速度,同时提高了路径的安全性。而后续的路径平滑处理,更是锦上添花,使得生成的路径在保证安全的情况下,更加简洁高效。当然,这只是路径规划领域中的一次小探索,未来还有更多的优化空间。比如进一步优化势场力的计算方式,或者尝试不同的路径平滑算法,也许能带来更令人惊喜的结果。希望这篇博文能给对路径规划感兴趣的小伙伴们一些启发,大家一起在这
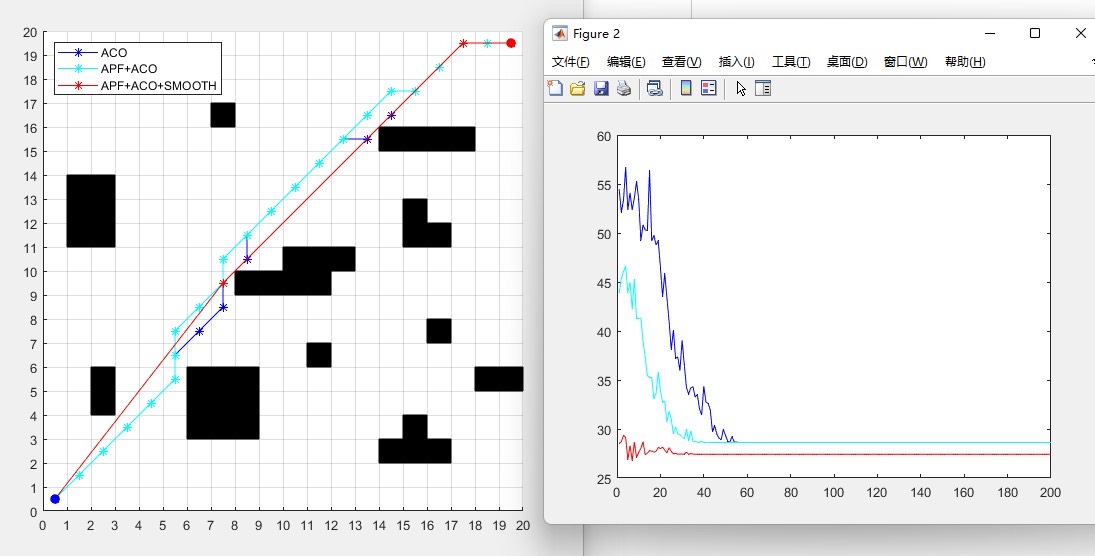
改进蚁群算法路径规划,融合人工势场APF,将距离启发和势场力整合到状态转移函数中,使得收敛更快,并且路径更安全,平滑后在保证路径安全的情况下,减少了拐点数量和路径长度,matlab,有参考
在路径规划这个充满挑战与机遇的领域,蚁群算法凭借其独特的仿生特性,一直备受关注。然而,它也并非十全十美,收敛速度以及路径安全性等方面,时常成为优化的重点方向。今天,咱们就来唠唠如何通过融合人工势场(APF)来对蚁群算法进行改进,实现更优的路径规划效果,并且使用 Matlab 来见证这一神奇的过程。
改进思路:距离启发与势场力的融合
传统蚁群算法在选择下一个节点时,主要依赖信息素和启发式信息。但为了让算法收敛更快,并且生成的路径更加安全,我们将距离启发和势场力整合到状态转移函数中。
想象一下,在一个充满障碍物的环境里,蚂蚁要找到一条从起点到终点的最优路径。距离启发就像是给蚂蚁一个“大致方向感”,让它们知道朝着哪个方向走可能更接近目标。而势场力则像是一种“排斥力”,当蚂蚁靠近障碍物时,会被障碍物产生的势场力推开,从而保证路径的安全性。
下面这段伪代码展示了状态转移函数改进的大致思路:
% 假设tau为信息素矩阵,eta为启发式信息矩阵(这里可包含距离启发信息)
% alpha和beta分别为信息素和启发式信息的权重
% APF_force为通过人工势场计算得到的势场力向量
function next_node = improved_transition_function(current_node, tau, eta, alpha, beta, APF_force)
available_nodes = find_available_nodes(current_node); % 获取当前节点可到达的节点
p = zeros(size(available_nodes));
for i = 1:length(available_nodes)
node = available_nodes(i);
% 整合信息素、启发式信息以及势场力
p(i) = (tau(current_node, node) ^ alpha) * (eta(current_node, node) ^ beta) * exp(-norm(APF_force(node)));
end
p = p / sum(p); % 归一化概率
next_node = available_nodes(randsample(length(available_nodes), 1, true, p)); % 根据概率选择下一个节点
end在上述代码中,通过将势场力 APF_force 以指数形式融入到选择概率 p 的计算中,当某个节点受到的势场力较大(靠近障碍物)时,其被选中的概率就会降低,这样就引导蚂蚁避开障碍物,同时距离启发信息也体现在 eta 中,综合起来帮助蚂蚁更快地找到较优路径。
路径平滑处理:减少拐点与缩短长度
当蚂蚁通过改进后的蚁群算法找到一条路径后,这条路径可能还不够完美,存在较多的拐点,路径长度也并非最短。所以,我们需要对路径进行平滑处理。
平滑处理的核心思路是在保证路径安全的前提下,通过一些优化算法对路径点进行调整。这里可以采用简单的局部优化策略,比如对路径上相邻的三个点进行判断,如果这三个点构成的折线可以通过调整中间点来使路径更平滑,并且不与障碍物冲突,那么就进行调整。
function smoothed_path = smooth_path(path, obstacle_map)
smoothed_path = path;
for i = 2:length(path)-1
new_point = (path(i - 1) + path(i + 1)) / 2; % 尝试将中间点调整到两端点的中点
if ~is_collision(new_point, obstacle_map) % 判断新点是否与障碍物冲突
smoothed_path(i) = new_point;
end
end
end上述代码展示了一个简单的路径平滑过程。is_collision 函数用于判断某个点是否与障碍物发生碰撞,通过遍历路径上的中间点,尝试将其调整到两端点的中点,如果新点不与障碍物冲突,就更新路径,从而逐步减少拐点数量,并在一定程度上缩短路径长度。
总结与展望
通过融合人工势场到蚁群算法的状态转移函数中,我们成功地加快了算法的收敛速度,同时提高了路径的安全性。而后续的路径平滑处理,更是锦上添花,使得生成的路径在保证安全的情况下,更加简洁高效。
当然,这只是路径规划领域中的一次小探索,未来还有更多的优化空间。比如进一步优化势场力的计算方式,或者尝试不同的路径平滑算法,也许能带来更令人惊喜的结果。希望这篇博文能给对路径规划感兴趣的小伙伴们一些启发,大家一起在这个有趣的领域中继续探索吧!

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐

 4
4 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)