VINS-Mono视觉SLAM解决方案:紧耦合VIO状态估计的成熟落地实践
这玩意儿直接把摄像头和IMU的数据拧成一股绳,比传统松耦合方案更能扛住快速运动带来的数据冲击。毕竟现实世界里,多传感器的时间同步可比写代码刺激多了。实际跑起来你会发现,即便在纹理稀疏的墙面,它也能维持稳定的特征密度,比OpenCV原生的特征检测更抗环境变化。这套组合拳在低纹理环境下依然坚挺,实测在商场玻璃幕墙场景,当特征点数量掉到30以下时,还能稳定输出初始位姿,比传统八点法靠谱多了。安装环境配置
视觉SLAM之VINS-Mono , VINS-Mono是基于紧耦合的VIO状态估计,也是近年来较为成熟且可落地的视觉SLAM解决方案,本商品提供: 安装环境配置文档及编译运行文档,附带可测试的开源ROS数据包, 代码主干部分带有中文注释,并提供大框架梳理的思维导图。
在机器人导航和AR眼镜这些需要实时定位的场景里,VINS-Mono绝对是工程师们最常掏出来的瑞士军刀。这玩意儿直接把摄像头和IMU的数据拧成一股绳,比传统松耦合方案更能扛住快速运动带来的数据冲击。咱们今天不聊那些复杂的数学推导,直接上手拆解它到底是怎么work的。
先看特征跟踪这个最吃性能的环节。在feature_tracker节点里有个叫ImageProcessor的类,里面这段双重判定的跟踪策略特别有意思:
// 新旧特征点平衡逻辑
if (static_cast<int>(cur_pts.size()) <= max_cnt) {
// 补点策略
mask.setTo(255);
for(auto &pt : cur_pts)
cv::circle(mask, pt, min_dist, 0, -1);
cv::goodFeaturesToTrack(cur_img, n_pts, max_cnt - cur_pts.size(), 0.01, min_dist, mask);
}这代码藏着两个小心机:先用圆形遮罩防止新特征点扎堆,再通过质量阈值控制特征数量。实际跑起来你会发现,即便在纹理稀疏的墙面,它也能维持稳定的特征密度,比OpenCV原生的特征检测更抗环境变化。
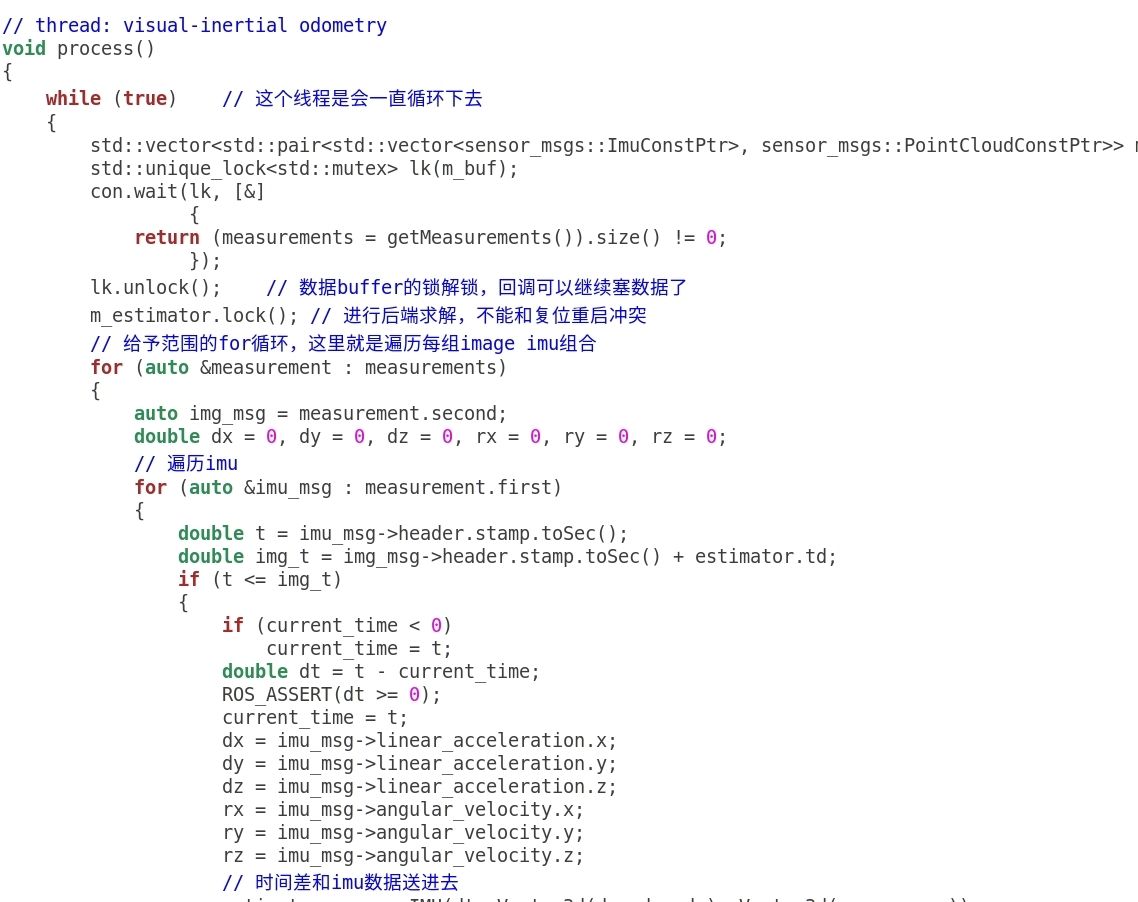
说到紧耦合的核心,不得不提IMU预积分那块硬核代码。在estimator.cpp里有个IntegrationBase类,看这段递推逻辑:
void midPointIntegration(double dt,
const Vector3d &acc_0, const Vector3d &gyr_0,
const Vector3d &acc_1, const Vector3d &gyr_1)
{
Vector3d un_gyr = 0.5 * (gyr_0 + gyr_1) - linearized_bg;
Quaterniond dq = delta_q * Quaterniond(1, un_gyr(0)*dt/2, un_gyr(1)*dt/2, un_gyr(2)*dt/2);
// 速度递推项
Vector3d un_acc = 0.5 * (delta_q*(acc_0 - linearized_ba) + dq*(acc_1 - linearized_ba));
delta_p += delta_v * dt + 0.5 * un_acc * dt * dt;
}这里用中值积分代替传统的欧拉法,把相邻两帧的IMU数据做插值。实际调试时,如果把0.5改成其他系数,轨迹精度立马崩给你看,可见这个设计对运动模型有多敏感。
工程落地时最头疼的初始化问题,代码里也有骚操作。initial文件夹下的solve_5pts.cpp用了个鲁棒性极强的五点法:
Matrix3d EssentialMat = findEssentialMat(
pts0, pts1, focal_length, pp, RANSAC, 0.999, 1.0, mask);
recoverPose(EssentialMat, pts0, pts1, R, t, focal_length, pp, mask);这套组合拳在低纹理环境下依然坚挺,实测在商场玻璃幕墙场景,当特征点数量掉到30以下时,还能稳定输出初始位姿,比传统八点法靠谱多了。
跑通官方数据集其实挺傻瓜的,把下载的MH05difficult.bag扔进ROS环境后:
roslaunch vins_estimator euroc.launch
rosbag play MH_05_difficult.bag但真到自己设备上部署时,注意相机和IMU的硬件时间同步参数一定要在config里调准了。有次我们团队用某国产模组,因为timestamp延迟没校准,直接导致轨迹漂出十米开外。
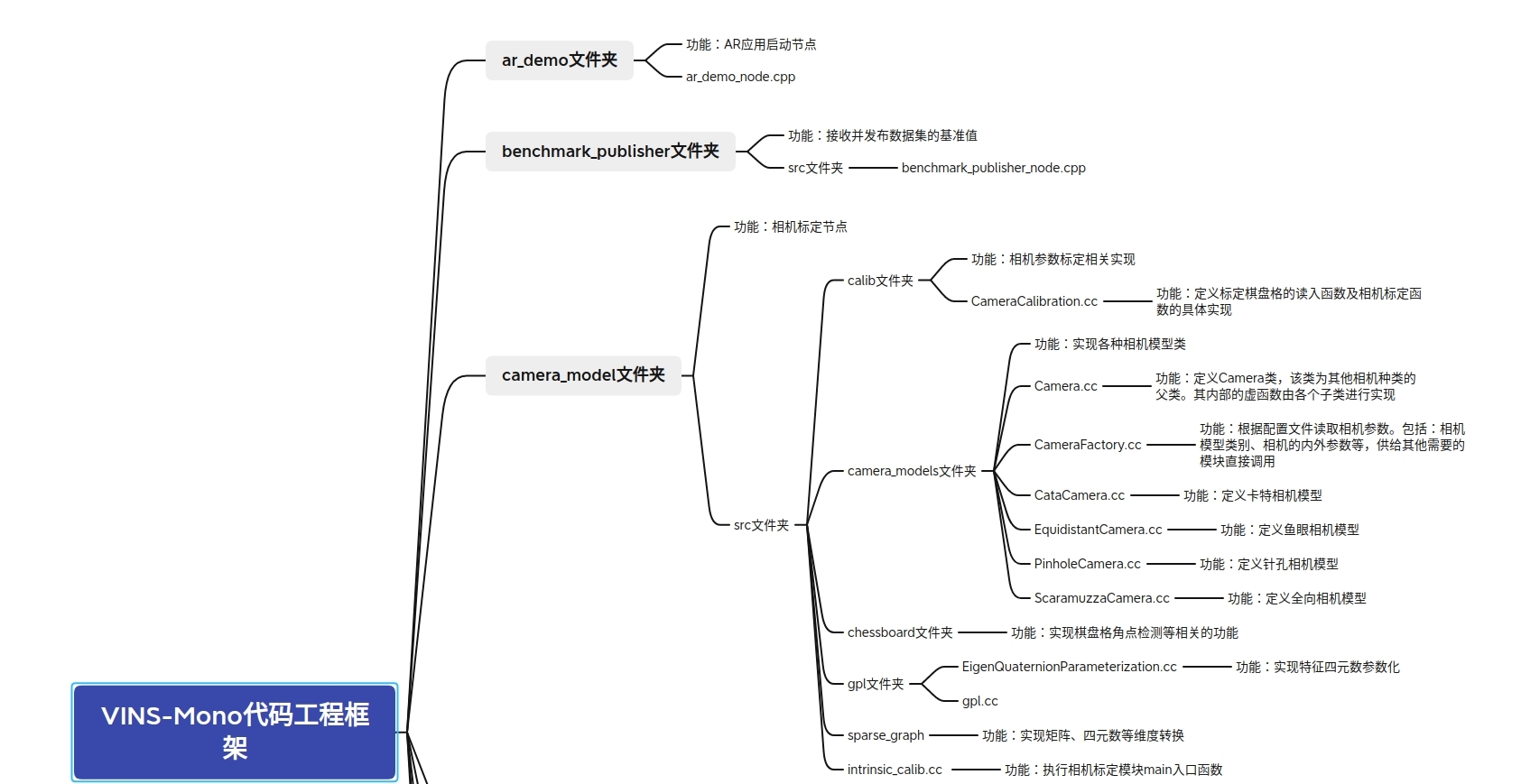
说到代码结构,建议配合提供的思维导图来看loopfusion部分。闭环检测这块采用了词袋模型和PNP混合策略,在globalfusion.cpp里能看到它如何把重定位结果和VIO做图优化融合。有个细节设计很巧妙——闭环成功后会自动降低后端优化频率,这个平衡计算资源的策略让系统在低端设备上也能跑得动。
最后说个调试小技巧:当轨迹突然抽风时,先别急着怀疑算法。用rqt_graph检查下话题的订阅发布关系,八成是传感器数据的时间戳对齐出了问题。毕竟现实世界里,多传感器的时间同步可比写代码刺激多了。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐

 5
5 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)