C# 实现视觉定位项目:融合多技术的实际应用案例
C#应用案例# 视觉定位应用案例 #visionPro定位应用案例集合VP、相机拍照、光源控制、TCPIP通信、串口通信为一体的实际项目应用案例注释清楚,代码易懂,适合新手做项目应用在自动化生产和检测领域,视觉定位技术扮演着至关重要的角色。今天,咱们来聊聊一个集合了 VisionPro(VP)、相机拍照、光源控制、TCP/IP 通信以及串口通信的 C# 实际项目应用案例。这对于新手来说,是个很好上
C#应用案例# 视觉定位应用案例 #visionPro定位应用案例 集合VP、相机拍照、光源控制、TCPIP通信、串口通信为一体的实际项目应用案例 注释清楚,代码易懂,适合新手做项目应用
在自动化生产和检测领域,视觉定位技术扮演着至关重要的角色。今天,咱们来聊聊一个集合了 VisionPro(VP)、相机拍照、光源控制、TCP/IP 通信以及串口通信的 C# 实际项目应用案例。这对于新手来说,是个很好上手的项目示例。
VisionPro 视觉定位
VisionPro 是一款强大的视觉处理工具,在 C# 中使用它,首先得引用相关的库文件。
// 引用 Cognex VisionPro 相关命名空间
using Cognex.VisionPro;
using Cognex.VisionPro.Caliper;
using Cognex.VisionPro.Inspection;假设我们要在一张图片中定位一个特定形状的物体。
// 创建一个 CogCaliperTool 工具实例
CogCaliperTool caliperTool = new CogCaliperTool();
// 加载视觉工具的配置文件
caliperTool.RunParams.InputImage.FileName = @"path\to\your\image.jpg";
caliperTool.Run();
// 获取定位结果
CogToolResultConstants result = caliperTool.RunResults.OutputResult;
if (result == CogToolResultConstants.Pass)
{
// 获取物体的位置信息
double x = caliperTool.RunResults.Results["CenterX"].Value;
double y = caliperTool.RunResults.Results["CenterY"].Value;
Console.WriteLine($"物体中心坐标: X={x}, Y={y}");
}
else
{
Console.WriteLine("未找到目标物体");
}代码分析
- 命名空间引用:引入必要的 VisionPro 命名空间,这样才能使用其中的各类工具和功能。
- 工具实例化:创建
CogCaliperTool实例,这是用于形状匹配和测量的工具。 - 配置输入图像:指定要处理的图像路径。
- 运行工具并获取结果:运行工具后,根据返回结果判断是否找到目标物体,并获取其位置信息。
相机拍照
相机拍照部分,我们使用第三方库 Emgu.CV(OpenCV 的.NET 封装)来实现。
// 引用 Emgu.CV 相关命名空间
using Emgu.CV;
using Emgu.CV.CvEnum;
using Emgu.CV.Structure;
// 初始化相机
VideoCapture capture = new VideoCapture(0);
if (!capture.IsOpened)
{
Console.WriteLine("相机打开失败");
return;
}
// 拍照并保存图片
Mat frame = new Mat();
capture.Read(frame);
Cv2.Imwrite(@"path\to\save\image.jpg", frame);
// 释放相机资源
capture.Dispose();代码分析
- 命名空间引用:为了使用相机相关功能,引入
Emgu.CV的命名空间。 - 相机初始化:通过
VideoCapture类初始化相机,参数0表示使用默认相机。 - 拍照与保存:读取相机的一帧画面并保存为图片。
- 资源释放:使用完相机后,及时释放资源。
光源控制
假设光源是通过串口进行控制的,这里简单模拟一下串口控制光源开关的操作。
// 引用串口通信命名空间
using System.IO.Ports;
// 初始化串口
SerialPort serialPort = new SerialPort("COM1", 9600);
try
{
serialPort.Open();
// 发送开灯指令
serialPort.Write("ON");
Console.WriteLine("光源已打开");
// 模拟一些操作后关灯
System.Threading.Thread.Sleep(5000);
serialPort.Write("OFF");
Console.WriteLine("光源已关闭");
}
catch (Exception ex)
{
Console.WriteLine($"串口操作出错: {ex.Message}");
}
finally
{
if (serialPort.IsOpen)
serialPort.Close();
}代码分析
- 命名空间引用:引入
System.IO.Ports命名空间来使用串口通信功能。 - 串口初始化:设置串口号为
COM1,波特率为9600。 - 串口操作:打开串口后发送开灯和关灯指令,并通过
Thread.Sleep模拟操作间隔。 - 异常处理与资源释放:捕获串口操作可能出现的异常,并在最后关闭串口。
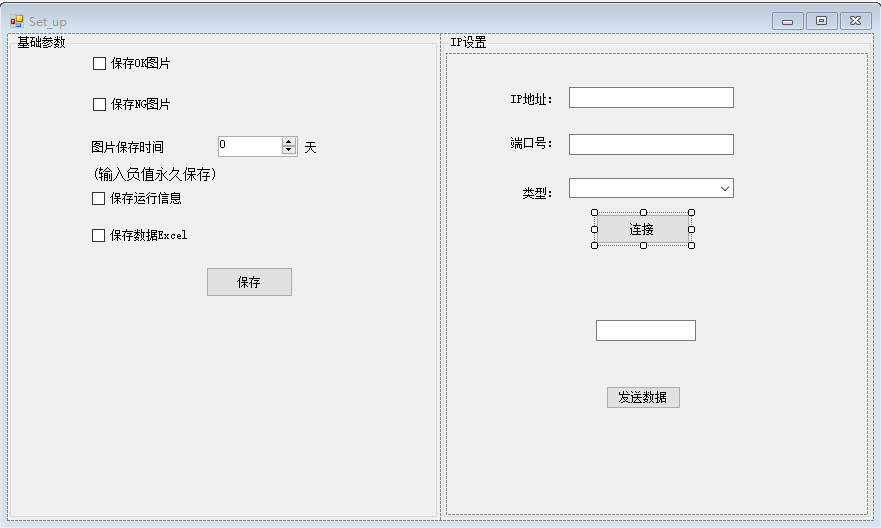
TCP/IP 通信
下面是一个简单的 TCP/IP 客户端示例,用于将视觉定位的结果发送给其他设备。
using System;
using System.Net.Sockets;
using System.Text;
// 创建 TcpClient 实例
TcpClient client = new TcpClient();
try
{
// 连接到服务器
client.Connect("127.0.0.1", 12345);
NetworkStream stream = client.GetStream();
// 准备要发送的数据(这里假设是视觉定位的坐标)
string data = "X=100,Y=200";
byte[] buffer = Encoding.UTF8.GetBytes(data);
// 发送数据
stream.Write(buffer, 0, buffer.Length);
Console.WriteLine("数据已发送");
}
catch (Exception ex)
{
Console.WriteLine($"TCP 通信出错: {ex.Message}");
}
finally
{
if (client.Connected)
client.Close();
}代码分析
- 创建客户端实例:使用
TcpClient类创建客户端对象。 - 连接服务器:指定服务器的 IP 地址和端口号进行连接。
- 数据发送:将准备好的数据转换为字节数组并发送。
- 异常处理与连接关闭:捕获可能的异常,并在最后关闭连接。
串口通信综合应用
上面光源控制部分简单展示了串口通信,实际项目中,可能还会从串口接收数据,比如获取设备状态等。
// 引用串口通信命名空间
using System.IO.Ports;
// 初始化串口
SerialPort serialPort = new SerialPort("COM1", 9600);
serialPort.DataReceived += new SerialDataReceivedEventHandler(SerialPort_DataReceived);
try
{
serialPort.Open();
// 发送指令获取设备状态
serialPort.Write("GET_STATUS");
}
catch (Exception ex)
{
Console.WriteLine($"串口操作出错: {ex.Message}");
}
private static void SerialPort_DataReceived(object sender, SerialDataReceivedEventArgs e)
{
SerialPort sp = (SerialPort)sender;
string data = sp.ReadExisting();
Console.WriteLine($"接收到的数据: {data}");
}代码分析
- 事件绑定:为串口的
DataReceived事件绑定处理方法,当有数据接收时会触发。 - 发送指令并接收数据:发送获取设备状态的指令,在事件处理方法中读取接收到的数据。
通过这个实际项目案例,将 VisionPro 视觉定位、相机拍照、光源控制、TCP/IP 通信和串口通信有机结合起来,希望能给新手朋友们在项目实践中带来一些启发和帮助。每个部分的代码都相对简单易懂,大家可以根据实际需求进一步优化和扩展。
C#应用案例# 视觉定位应用案例 #visionPro定位应用案例 集合VP、相机拍照、光源控制、TCPIP通信、串口通信为一体的实际项目应用案例 注释清楚,代码易懂,适合新手做项目应用




魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐

 48
48 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)