带你看懂工业机器视觉里的“镜头畸变”!
镜头畸变是光学镜头导致的图像直线弯曲现象,分为径向畸变(桶形/枕形)和切向畸变(安装偏差)。人眼可忽略轻微畸变,但工业机器视觉需要高精度矫正。通过棋盘格标定板进行软件校正,结合硬件安装调整,可有效消除畸变影响。相机标定是工业视觉系统的关键步骤,能确保图像坐标到真实坐标的精准转换。
大家有没有这样的经历:
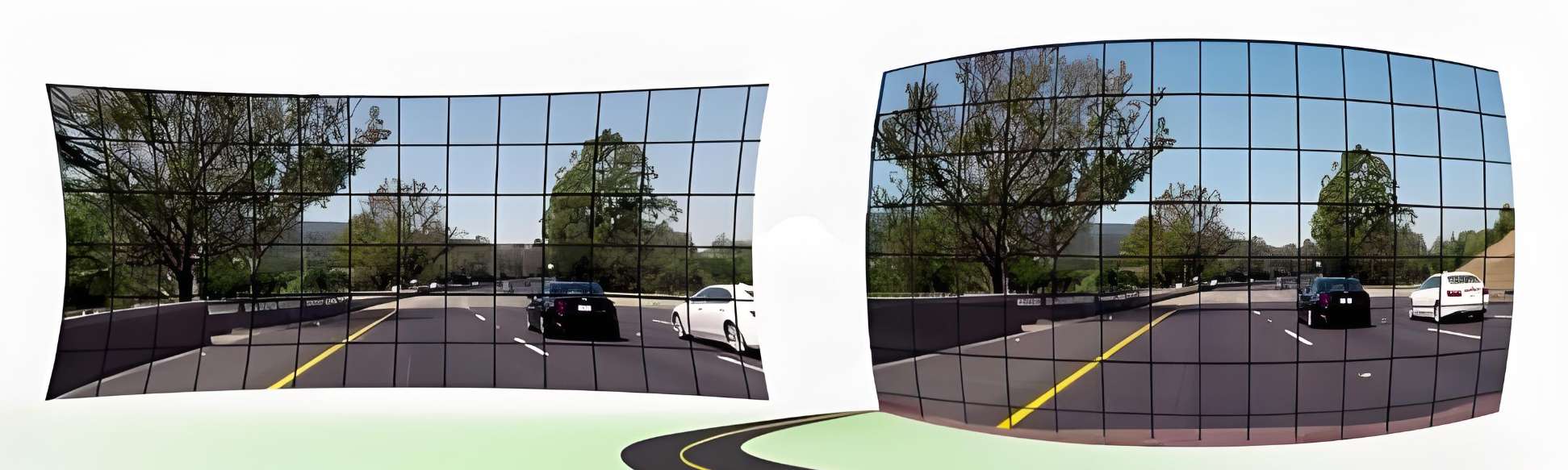
拍照时,明明是笔直的一面墙,拍出来却像波浪一样弯曲?
本来是正正方方的大楼,也莫名其妙地“变形”了?
别担心,你的手机没坏,也不是地球引力出了问题——这其实是镜头畸变在作怪!
什么是镜头畸变?
镜头畸变就是——由于镜头自身的光学结构,导致图像中原本平直的线条发生弯曲,看起来像“变形金刚”一样。

虽然这种畸变不会让照片变模糊,但在工业机器视觉中就没那么简单了。机器视觉可是用来测量和识别的,图像一歪一扭,测量就可能出错,识别也可能失败。所以,在工业场景里,畸变必须被“认真对待”!
畸变的两大类型:径向 + 切向
在工业视觉系统中,常见的畸变分为两种:
🎯 一、径向畸变(Radial Distortion)
这是最常见的一种畸变,由镜头的设计或制造工艺引起,越靠近图像边缘畸变越严重。
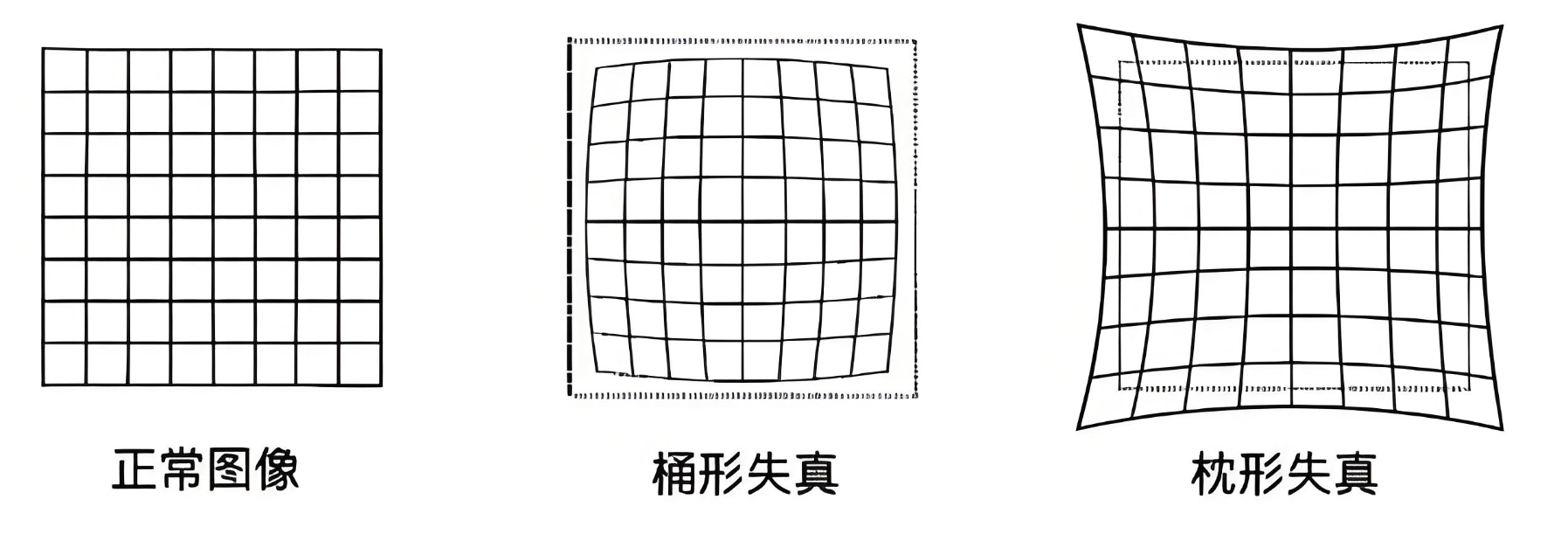
- 桶形畸变(Barrel Distortion):图像向外鼓起来,像木桶那样 bulging!
👉 直线往外弯,四周“鼓”了出来。
- 枕形畸变(Pincushion Distortion):图像向内凹陷,像个枕头被按了一下。
👉 直线向内收,四角“凹”了进去。
🔧 二、切向畸变(Tangential Distortion)
通常是镜头装歪了造成的,镜头和图像感应器没有完全平行。
结果是——图像中心和边缘都有失真,直线被拉成“弯弯绕”。
为什么人眼不太容易察觉?
其实我们的大脑非常强大,会自动“修正”这些小问题。只要畸变小于 2%,我们一般不会察觉。
但是,机器就不一样了!
在工业场景下,像尺寸测量、定位抓取这种高精度任务,对图像的“正不正”要求非常高,畸变就成了不能忽视的大问题。
那怎么办?当然是——矫正!
🧠 软件矫正
特别是对径向畸变,通过软件就能搞定!
常见的方法是:
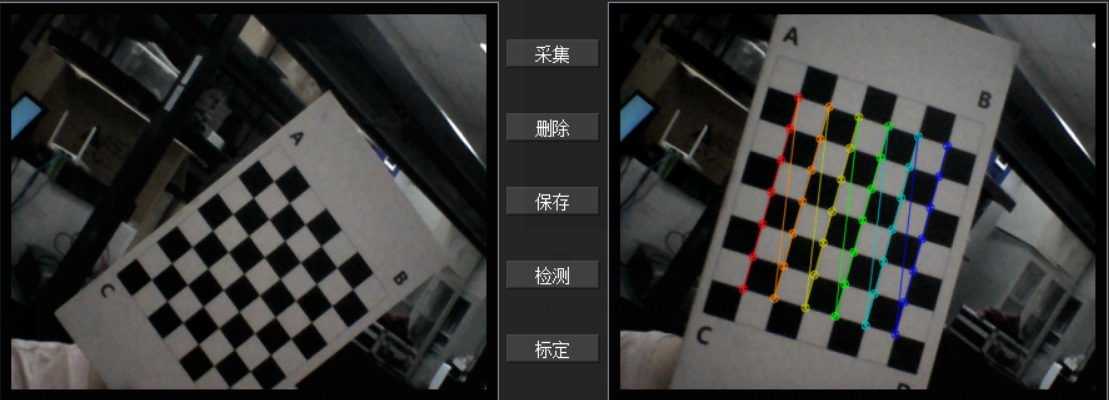
- 使用标定工具(比如棋盘格板)
- 让软件根据图像中的变形程度,计算出镜头的“畸变系数”
- 然后对图像进行“拉伸”或“压缩”,把它调回原样!
市面上很多视觉软件都集成了这项功能,操作也非常简单,只需输入棋盘格的尺寸,剩下交给软件!
🛠️ 硬件矫正
对于切向畸变,通常是因为安装不到位。
只要在安装时注意让镜头与感光面保持平行,就能大幅减少畸变。
所以,软硬结合才是王道!
相机标定:机器视觉的必修课!
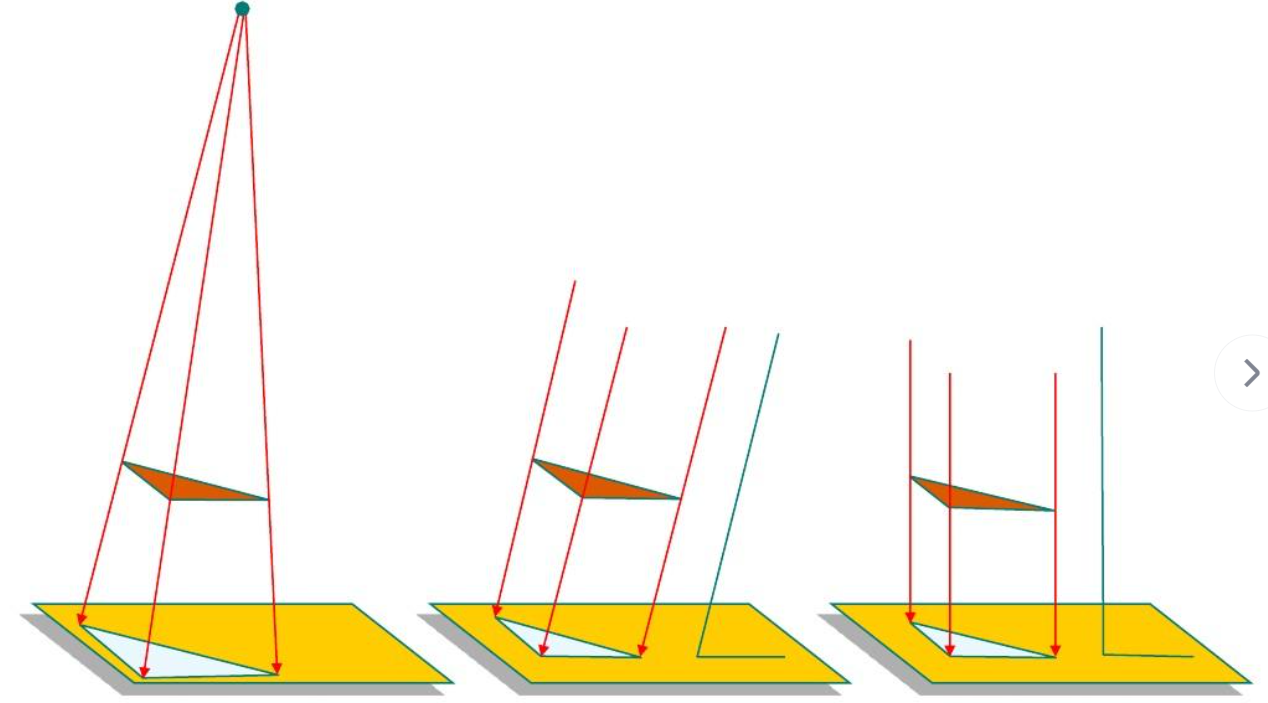
在工业视觉系统中,我们还需要进行相机标定,也就是让相机理解它“看见”的东西在现实世界中的位置。
这一步骤可以帮助系统把“畸变的图像坐标”转换为“真实的世界坐标”,是精准测量和操作的前提。
常用工具就是——棋盘格标定板!
把它放在相机视野中,软件就会根据格子的形状和大小自动进行标定,顺带完成畸变矫正。
总结一下!
| 畸变类型 | 原因 | 影响 | 解决方法 |
|---|---|---|---|
| 径向畸变 | 镜头设计/工艺问题 | 图像边缘弯曲(桶形/枕形) | 软件矫正 |
| 切向畸变 | 安装不正 | 整体图像变形 | 调整镜头安装角度 |
| 所有畸变 | 对测量、识别有影响 | 影响精度 | 相机标定 + 畸变校正 |

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 11
11 0
0- 0



 已为社区贡献41条内容
已为社区贡献41条内容

所有评论(0)