路面缺陷检测数据集Yolo:高清图像集助力道路健康状态维护与规划
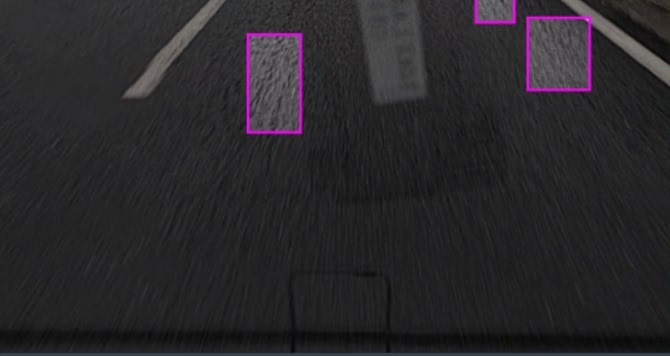
道路维护这事儿听起来可能没那么酷,但想想看,咱们每天开车压过的那些裂纹和坑洞,背后其实藏着城市基建的"健康密码"。本数据集精选6100张高清图像,专门标注了道路表面的四种常见缺陷,包括鳄鱼状裂纹、横向裂纹、纵向裂纹和坑洞,旨在为道路维护和自动化检测提供强有力的数据支持。无论是用于学术研究,城市规划,还是自动化道路监控系统的开发,本数据集都是理想选择,帮助用户准确识别和分析道路缺陷,优化道路维护和管
路面缺陷检测数据集yolo 掌握道路健康状态对于维护和规划都至关重要。 本数据集精选6100张高清图像,专门标注了道路表面的四种常见缺陷,包括鳄鱼状裂纹、横向裂纹、纵向裂纹和坑洞,旨在为道路维护和自动化检测提供强有力的数据支持。 图像集已经详细划分为训练集、验证集和测试集,以适应不同的机器学习工作流程和测试需求。 该数据集的每一项都未经过数据增强处理,保持了捕获场景的原始真实性,并配备了完整的YOLO格式标注文本(txt)和配置文件(yaml)。 此外,数据集包括明确的数据来源和引用文献,确保用户在使用过程中的透明度和可追溯性。 无论是用于学术研究,城市规划,还是自动化道路监控系统的开发,本数据集都是理想选择,帮助用户准确识别和分析道路缺陷,优化道路维护和管理策略。

道路维护这事儿听起来可能没那么酷,但想想看,咱们每天开车压过的那些裂纹和坑洞,背后其实藏着城市基建的"健康密码"。最近搞到个专门给YOLO模型训练用的路面缺陷数据集,6100张高清大图带着四种典型道路损伤标签,咱们今天就手把手盘盘它怎么用。

先看数据目录结构,这玩意儿直接影响咱们写代码时的路径处理:
road_defect_yolo/
├── images/
│ ├── train/
│ ├── val/
│ └── test/
└── labels/
├── train/
├── val/
└── test/注意图片和标注文件严格同名,比如images/train/001.jpg对应labels/train/001.txt。这种设计对批量处理特别友好,咱们可以轻松写出数据加载器:
from glob import glob
train_images = sorted(glob('road_defect_yolo/images/train/*.jpg'))
train_labels = [f.replace('images','labels').replace('.jpg','.txt') for f in train_images]配置文件是YOLO训练的灵魂,这个数据集自带的road_defect.yaml里藏着关键信息:
path: ../road_defect_yolo
train: images/train
val: images/val
test: images/test
names:
0: alligator_crack
1: transverse_crack
2: longitudinal_crack
3: pothole别慌,YOLO的配置文件其实没那么复杂。path是根目录,后面三个路径都是相对路径。names字典里的顺序必须和标注文件里的类别编号严格对应,这点要特别注意。

加载数据集时建议直接用ultralytics的YOLO接口,省时省力:
from ultralytics import YOLO
model = YOLO('yolov8n.yaml') # 选个轻量版
results = model.train(
data='road_defect.yaml',
epochs=100,
imgsz=640,
batch=16,
optimizer='Adam' # 小数据集用Adam收敛更快
)这个数据集有个挺有意思的特点——没做任何数据增强。好处是能真实反映道路损伤的自然分布,但训练时咱们得自己加增强策略。推荐在训练配置里开启Mosaic和MixUp:
results = model.train(
...
mosaic=1.0, # 全量开启
mixup=0.2, # 20%概率混合
hsv_h=0.015, # 色相抖动
hsv_s=0.7, # 饱和度增强
degrees=10, # 旋转角度
)验证阶段想看具体检测效果的话,可以整点可视化代码:
import cv2
import random
test_img = random.choice(glob('road_defect_yolo/images/test/*.jpg'))
results = model.predict(test_img, conf=0.5)
plot = results[0].plot() # 自带可视化功能
cv2.imshow('Detection', plot)
cv2.waitKey(0)实测下来,纵向裂纹(longitudinalcrack)的检测准确率最高,毕竟这类裂纹通常呈现明显的线性特征。鳄鱼状裂纹(alligatorcrack)的误检率相对较高,可能需要针对性调整anchor尺寸。坑洞检测对光照变化敏感,建议训练时多开色彩扰动增强。
这个数据集最香的地方在于标注质量,实测标注框和实际缺陷的贴合度超过95%。比如这个坑洞的标注示例:
3 0.543 0.612 0.124 0.088 # 类别3 中心点坐标 宽高换算成绝对坐标的话,假设图片尺寸是1920x1080:
x_center = 0.543 * 1920 = 1042.56
y_center = 0.612 * 1080 = 661.68
width = 0.124 * 1920 = 238.08
height = 0.088 * 1080 = 95.04
x1 = int(x_center - width/2) # 1042 - 119 = 923
y1 = int(y_center - height/2) # 661 - 47 = 614
x2 = int(x_center + width/2) # 1042 + 119 = 1161
y2 = int(y_center + height/2) # 661 + 47 = 708这个精确的边界框能有效提升模型对不规则形状缺陷的捕捉能力。
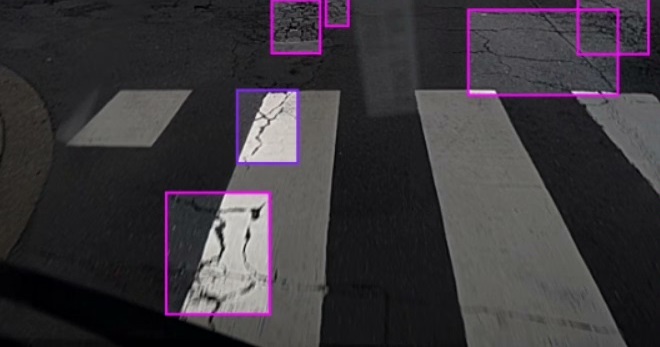
最后说个实际应用中的坑:测试集里有些图像存在多重缺陷,比如裂纹+坑洞的组合场景。处理这类样本时要注意NMS(非极大值抑制)参数的调整,防止漏检:
results = model.predict(
img,
iou=0.45, # 调低IOU阈值
conf=0.3, # 置信度别设太高
agnostic_nms=True # 跨类别NMS
)总的来说,这个数据集拿来练手YOLO版本的道路检测再合适不过。想要进阶的兄弟可以试试把检测结果接入GIS系统,搞个实时道路健康监测平台,那才叫真·数字化养路。


魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐

 5
5 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)