卡尔曼滤波的matlab实现
理论部分见以前的博客。代码:%kalman filter%x=Ax+B(u+w)%y=cx+D+vclear all;close all;%对象的连续模型(传递函数)sys=tf([133],[1,25,0]);%对象的连续模型离散化ts=0.001;dsys=c2d(sys,ts,'z');[num,den]=tfdata(dsys,'v');%对象的连续状态空...
·
理论部分见以前的博客。
代码:
%kalman filter
%x=Ax+B(u+w)
%y=cx+D+v
clear all;
close all;
%对象的连续模型(传递函数)
sys=tf([133],[1,25,0]);
%对象的连续模型离散化
ts=0.001;
dsys=c2d(sys,ts,'z');
[num,den]=tfdata(dsys,'v');
%对象的连续状态空间
A1=[0 1;0 -25];
B1=[0;133];
C1=[1 0];
D1=[0];
ss1= ss(A1,B1,C1,D1);%对象的连续状态空间
dss=c2d(ss1,ts,'z');%将对象的连续状态空间离散化
[A,B,C,D]=ssdata(dss);%获取对象的离散状态空间的abcd
%输入(包含噪声)
for i=1:1:3000
u(i)=0.1*rands(1)+1.0*sin(2*pi*1.5*i*ts);
end
for i=1:1:3000
v(i)=0.1*rands(1);
end
%数据初始化
y_1=0; %上一时刻对象的输出
y_2=0;%上一上一时刻对象的输出
u_1=0;%上一时刻对象的输入
u_2=0;%上一上一时刻对象的输入
x_1=zeros(2,1);%上一时刻对象的状态
Q=1;
p_1=B*Q*B';
R=1;
y=zeros(1,3000);
yv=zeros(1,3000);
y_filter=zeros(1,3000);
%滤波开始
for k=1:1:3000
time(k)=k*ts;
Q=1;
y(k)=-den(2)*y_1-den(3)*y_2+num(2)*u_1+num(3)*u_2;%对象输出
yv(k)= y(k)+v(k);%对象输出加上测量噪声,形成观测值,就是对他进行滤波校正
x=A*x_1+B*u(k); %注意这里易错:因为等号右边已经为数组形式,所以不能像以前那样将其写成:x(k)=A*x_1+B*u(k),因为不能把一个数组保存到另外一个数组里面,所以等号左边只能为一个变量,不能为一个数组。
%今后也要注意职能将数字保存到数组中,不能将数组保存到数组中。
p=A*p_1*A'+B*Q*B';
K=p*C'/(C*p*C'+R);
x= x+K*(yv(k)-C*x);
y_filter(k)=C*x;
p=(eye(2)-K*C)*p;
u_2=u_1;
u_1=u(k);
y_2=y_1;
y_1=y(k);
x_1= x;
p_1=p;
end
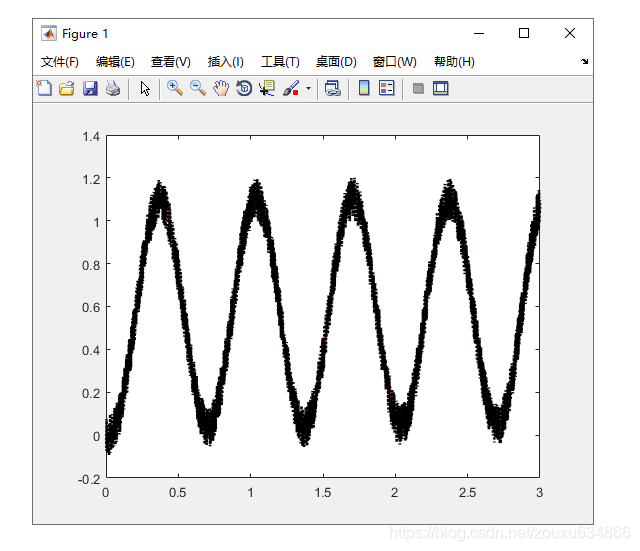
figure(1);
plot(time,y,'r',time,yv,'k:','linewidth',2);
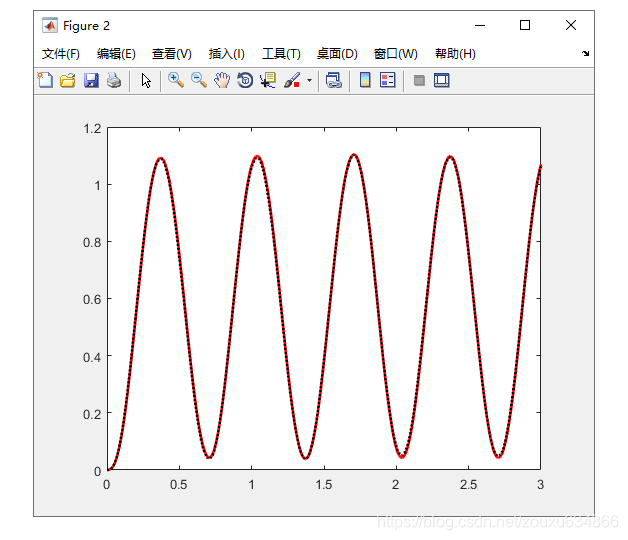
figure(2);
plot(time,y,'r',time,y_filter,'k:','linewidth',2);
结果:
总结:这部分代码需要注意的地方:
1.状态空间的表达形式以及离散化方法。
2.在进行矩阵运算时要注意等号左右两边的数组的形式是否一样,并且要注意不能把一个数组保存到另外一个数组里面,这些细节会影响代码的书写效率。
simulink仿真
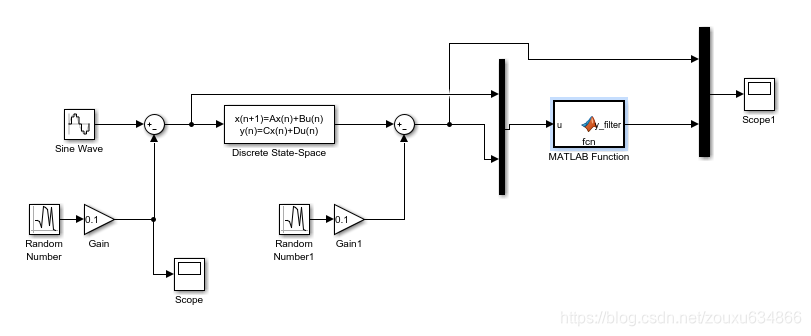 需要注意:卡尔曼滤波模块的输入包括两部分:控制对象的观测值y以及对象的输入u,这两部分都包含相应的干扰。
需要注意:卡尔曼滤波模块的输入包括两部分:控制对象的观测值y以及对象的输入u,这两部分都包含相应的干扰。
其中matlab function模块的代码:
function y_filter = fcn(u)
persistent A B C D Q p R x1 p_1
A=[1.000 0.0010;0 0.9753];
B=[0.0001;0.1314];
C=[1 0];
D=[0];
R=1;
Q=1;
if isempty(x1)
x1=zeros(2,1);%上一时刻对象的状态
end
if isempty(p_1)
p_1=B*Q*B';
end
x1=A*x1+B*u(1); %注意这里易错:因为等号右边已经为数组形式,所以不能像以前那样将其写成:x(k)=A*x_1+B*u(k),因为不能把一个数组保存到另外一个数组里面,所以等号左边只能为一个变量,不能为一个数组。
%今后也要注意职能将数字保存到数组中,不能将数组保存到数组中。
p=A*p_1*A'+B*Q*B';
K=p*C'/(C*p*C'+R);
x1= x1+K*(u(2)-C*x1);
y_filter=C*x1;
p=(eye(2)-K*C)*p;
x1= x1;
p_1=p;
y_filter = y_filter ;
运行结果: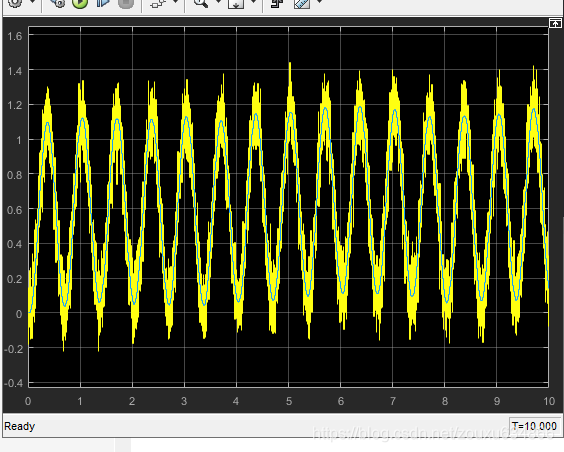

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 2
2 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)