sar数据集_分享(七)丨 遥感数据融合数据集
图片来源于网络随着传感器种类的不断丰富且获取数据的能力不断提升,遥感数据种类越发多样,而对应的遥感任务也越发精细,因此依靠单一数据已难以完成复杂的遥感任务,通过对具有不同特征的数据进行融合能够达到更好的效果,因此遥感数据融合已被广泛应用于遥感中。遥感数据融合是指充分利用多源数据信息的冗余性、互补性和合作性,使得融合后的遥感数据具有更精细更丰富的信息。由于数据的获取在融合中占了重要地位,因...
图片来源于网络
随着传感器种类的不断丰富且获取数据的能力不断提升,遥感数据种类越发多样,而对应的遥感任务也越发精细,因此依靠单一数据已难以完成复杂的遥感任务,通过对具有不同特征的数据进行融合能够达到更好的效果,因此遥感数据融合已被广泛应用于遥感中。
遥感数据融合是指充分利用多源数据信息的冗余性、互补性和合作性,使得融合后的遥感数据具有更精细更丰富的信息。由于数据的获取在融合中占了重要地位,因此我们对现有的常用融合数据集进行了总结,包括时空融合数据集和多源融合数据集两大类。
 时空融合数据集
时空融合数据集
遥感图像时空融合,指的是结合高空间、低时间分辨率图像(如Landsat,SPOT等,以下简称为细图像)和低空间、高时间分辨率图像(如MODIS等,以下简称为粗图像),生成同时兼具高空间、高时间分辨率的合成遥感数据。这样的数据对于植被监测、环境监测、农作物估产等应用有很大帮助。
“遥感图像时空融合”这个概念自2006年被提出,至今已经发展了十多年。为了解决该领域目前没有基准数据集这个问题,李军教授团队提供了3个Landsat-MODIS数据集以供学者下载使用。
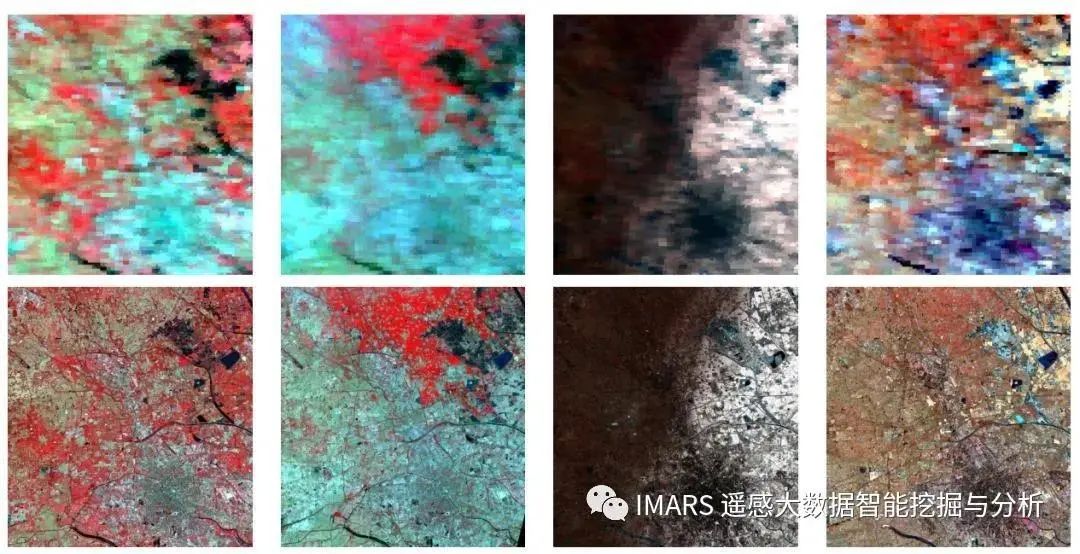
3个数据集分别命名为AHB数据集、Tianjin数据集和Daxing数据集。分别来自内蒙古阿鲁科尔沁旗(Ar Horqin Banner)、天津和北京大兴区,其总结如表1所示:
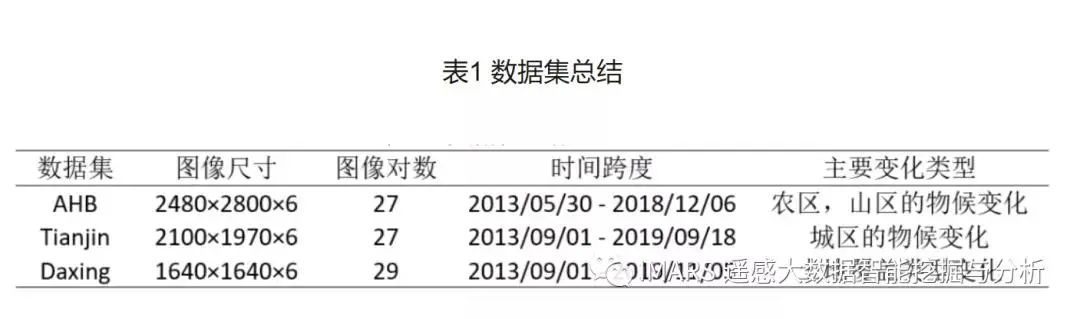
这3个数据集的特点可以概括为:
-
地域类型多样:数据集中包括了各种各样的地物,如农田、牧场、山区、城镇、城市等。
-
时间跨度长:3个数据集的时间跨度都超过了5年。
-
具有挑战性:3个数据集都是异质性较高的区域,并包括了土地覆盖类型的变化。
3个数据集的示例如下所示:
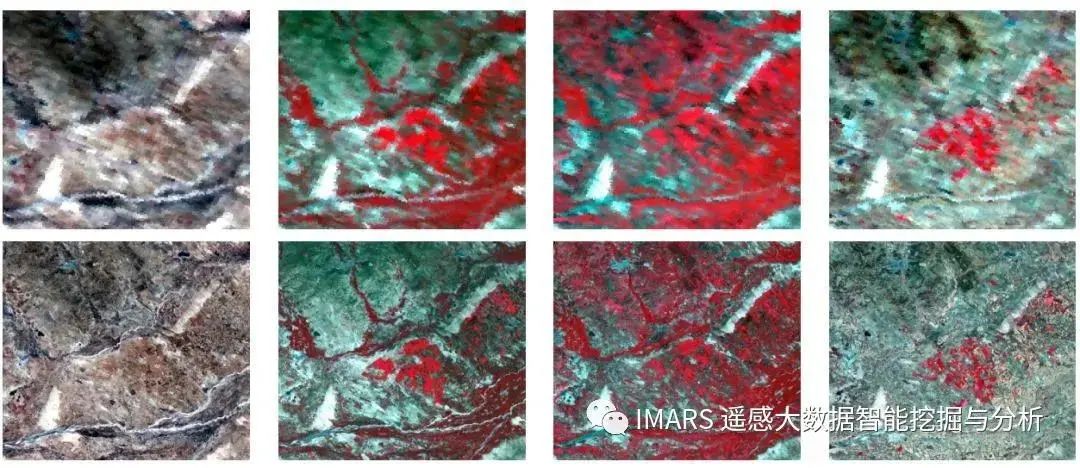
AHB数据集示例图像对
Tianjin数据集示例图像对
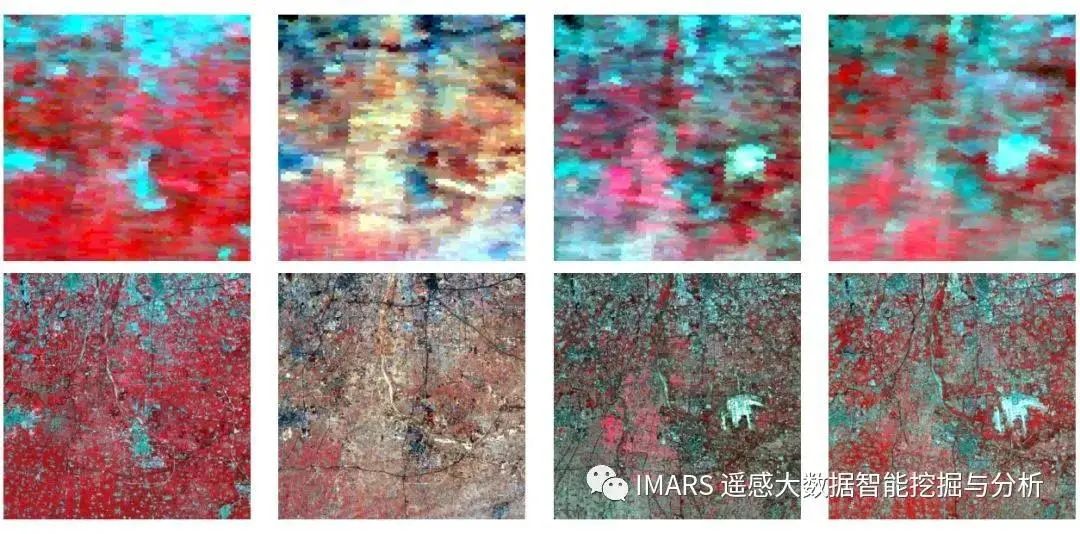
Daxing数据集示例图像对
下载地址:
https://pan.baidu.com/s/1ymgud6tnY6XB5CTCXPUfnw
https://drive.google.com/open?id=1yzw-4TaY6GcLPIRNFBpchETrFKno30he
多源融合数据集
多源数据融合指利用多种类型的遥感数据完成遥感任务,由于不同地物类别间的差异不仅体现在光谱和形态上,还存在于其他方面如高度等,因此利用单一的数据常无法完成很好的区分,而通过对多源数据进行融合能够充分利用不同数据的特征,使得地物间的差异更加明显,从而更好地完成分类、对象提取等任务。
由于传感器硬件条件以及内存的限制,获取的数据往往不能同时具备高时间分辨率和空间分辨率,从而使得无法对获取的数据进行很好的使用,时空数据融合则很好地解决了这个问题。时空数据融合是指对具有不同空间分辨率及不同时间分辨率的影像进行融合,使得获取的数据同时具有高空间分辨率和高时间分辨率,因此被广泛应用于变化监测中。
IEEE数据融合大赛数据集
数据融合大赛由IEEE的地球科学与遥感学会(GRSS)的数据融合技术委员会(DFTC)主办,自2006年以来每年举办一次,提供了丰富的可供融合的数据集。
下载地址:
http://www.grss-ieee.org/community/technical-committees/data-fusion/
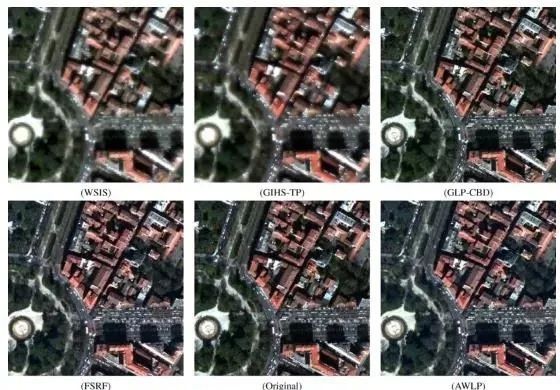
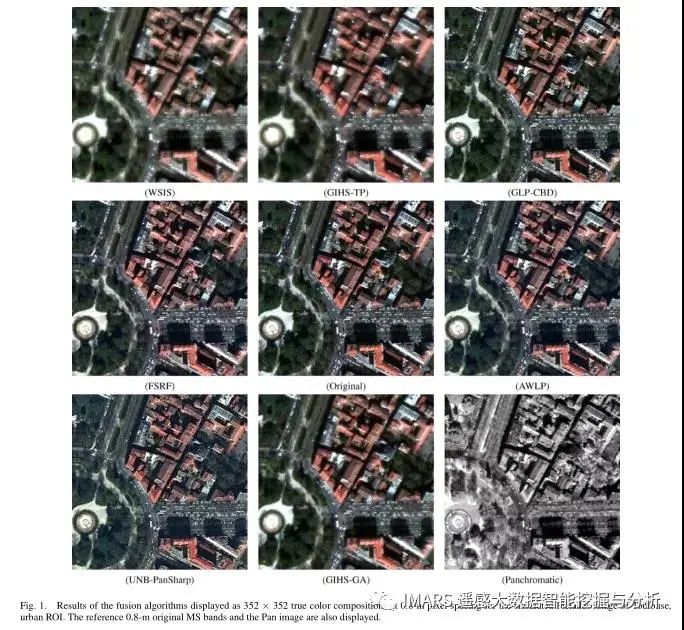
2006年融合主题为PANSharpening,包含Pléiades和Mississippi State University campus两个数据集。
-
The Pléiades dataset
每个数据集包括一个高空间分辨率全色图像(0.80 m分辨率),波段为500-850 nm,对应场景大小为5000x20000,及其对应的多光谱图像(3.2 m分辨率),对应场景大小为1250x5000,共包含6个场景。
-
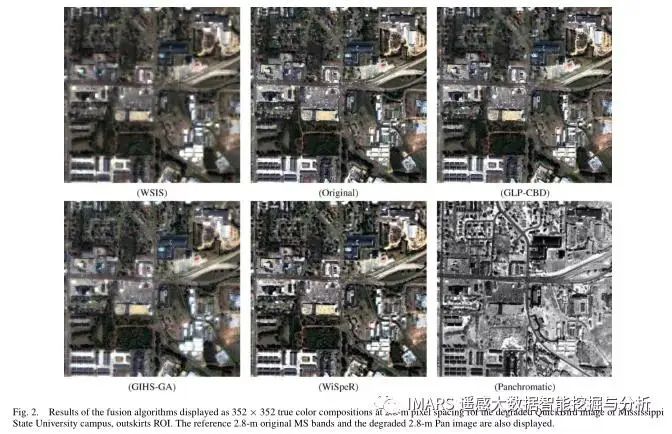
The Mississippi State University campus
多光谱和全色图像均由QuickBird获取,地点为密西西比州立大学校园,全色影像空间分辨率为0.7 m,包含近红外波段,多光谱图像空间分辨率为2.8 m,大小为1834x1721。
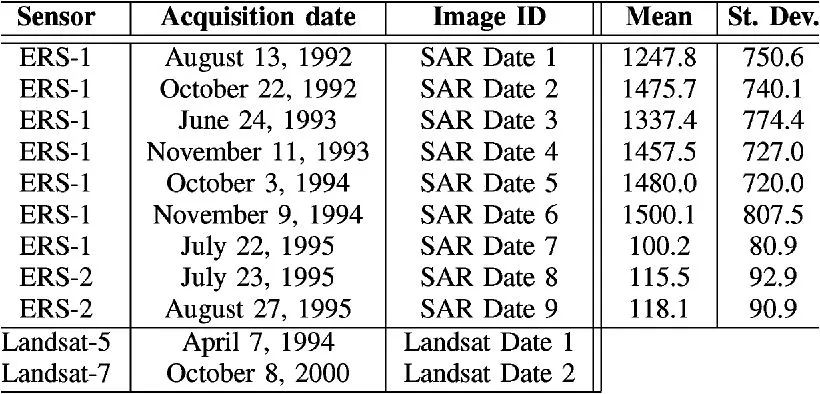
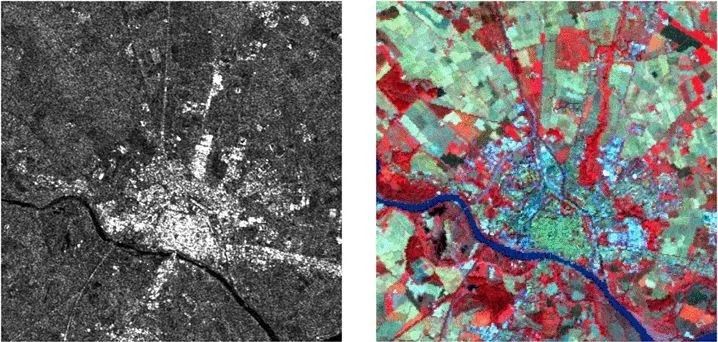
大赛旨在探究雷达与光学影像融合实现城市土地覆盖和土地利用分类。包含ERS和Landsat两种多光谱数据。提供了9个ERS振幅数据集(SAR)和2个Landsat多光谱图像。SAR成像时间为1992年-1995年,Landsat数据分别在1994年和1995年获取。成像地点为位于意大利北部的帕维亚市区(45.11 N,9.09 E),为功能多样的城市覆盖类型。
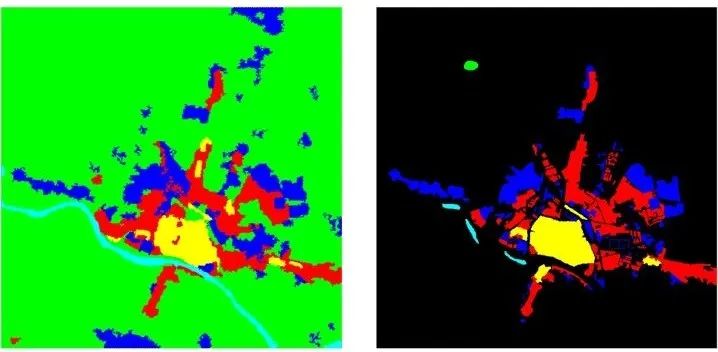
主题为利用高分辨率高光谱影像数据进行分类。该数据由反射光学系统成像光谱仪(ROSIS-03)光学传感器获取,拍摄地点为意大利帕维亚市,其波段范围为0.43-0.86 μm,考虑到噪声的影响去除了13个波段,共包含剩余的102个波段,空间分辨率为1.3 m,主要考虑建筑、道路、阴影、植被以及水体5种类别的分类,数据集中不包含训练样本。

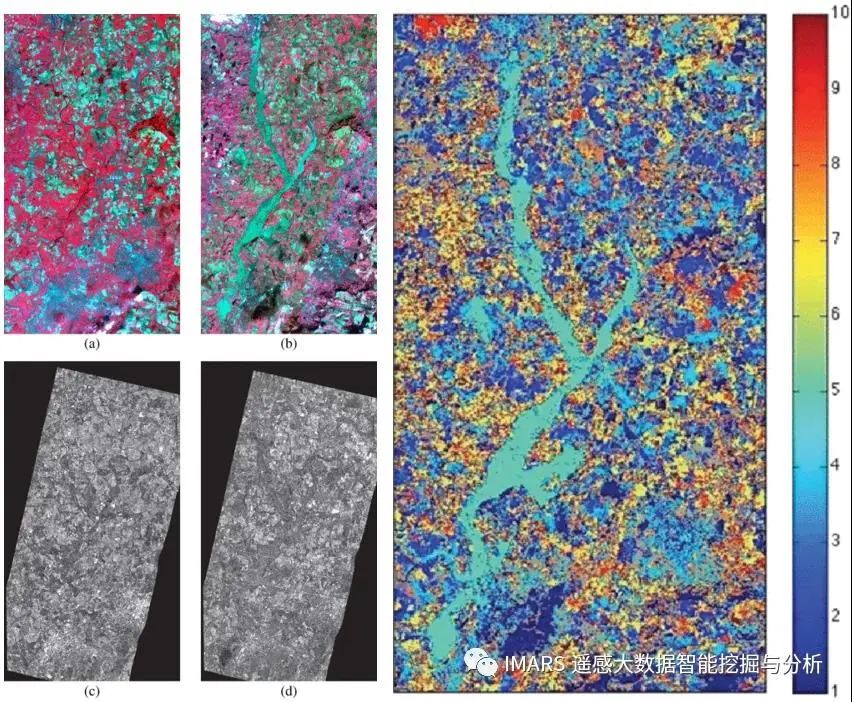
主题为利用多时相和多模态图像检测洪水区域。使用的数据为英国的格洛斯特地区洪灾发生前后的两组SPOT以及ERS数据。SPOT图像于1999年9月和2000年11月采集,仅包含多光谱波段(没有可用的全色信息),光谱范围为0.5-0.89 um,空间分辨率为20 m。ERS-1是在1999年10月和2000年11月采集的,以wave模式收集,空间分辨率为10 m,条带宽度为5 km。
竞赛主题为遥感数据的多角度融合。数据由DigitalGlobe提供,为WorldView-2多角度数据,于2010年1月在巴西里约热内卢的3分钟时间内收集的,包括16位全色图像和包含8个波段的多光谱图像,由5个标准正交的多角度采集而成。包括城市的市区,有大量的大型建筑物,商业和工业结构,机场以及社区公园和私人住宅的混合体。数据卫星仰角前向为44.7°,56.0°和81.4°,向后为59.8°和44.6°。

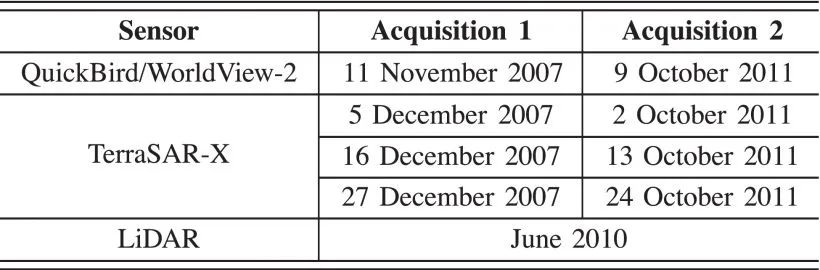
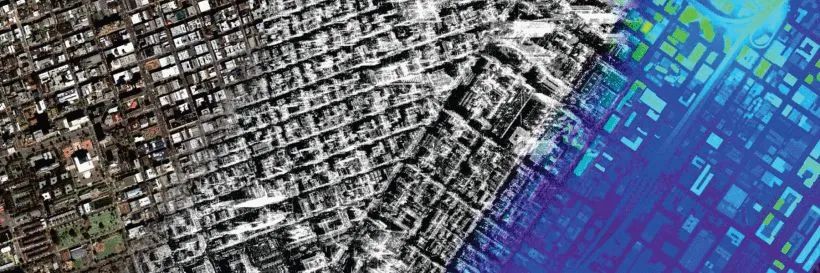
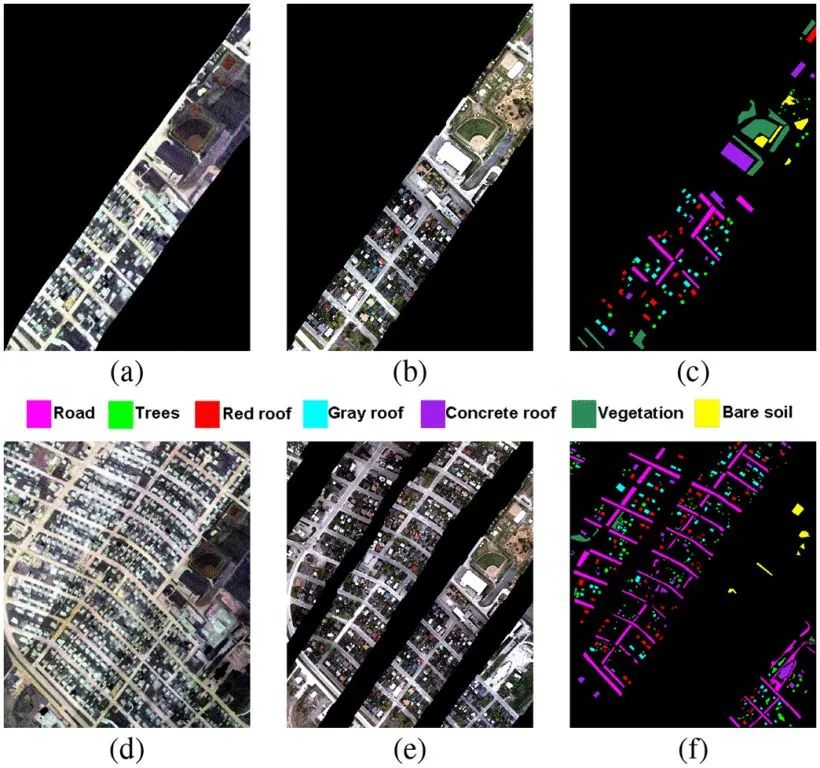
旨在探究超高空间分辨率(VHR)的多模式/多时间图像融合在各种遥感应用中的潜在用途。数据由DigitalGlobe,Astrium Services和美国地质调查局(USGS)提供,为旧金山市区的3种不同类型数据集,包括星载多光谱数据(QuickBird,WorldView-2),合成孔径雷达(SAR)数据(TerraSAR-X)和LiDAR数据。影像场景涵盖了许多大型建筑物,摩天大楼,商业和工业结构,社区公园和私人住宅的混合体以及高速公路和桥梁。QuickBird / WorldView-2 / TerraSAR-X数据集分别于2007年末和2011年获得,LiDAR数据则是在2010年6月收集到的,其中还包括由LiDAR数据生成的衍生产品(DEM, DSM和强度信息)。
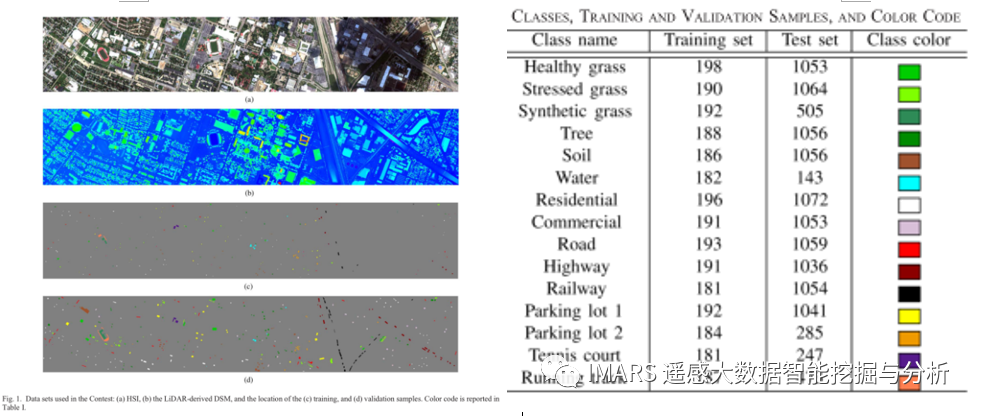
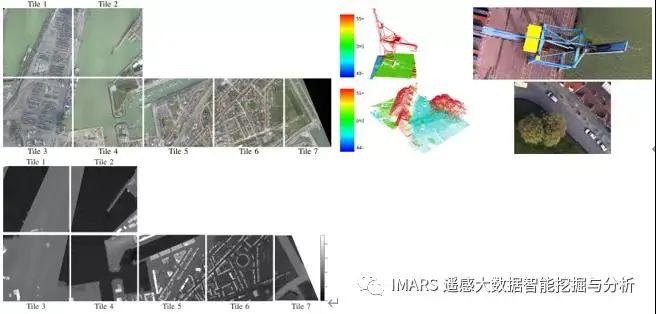
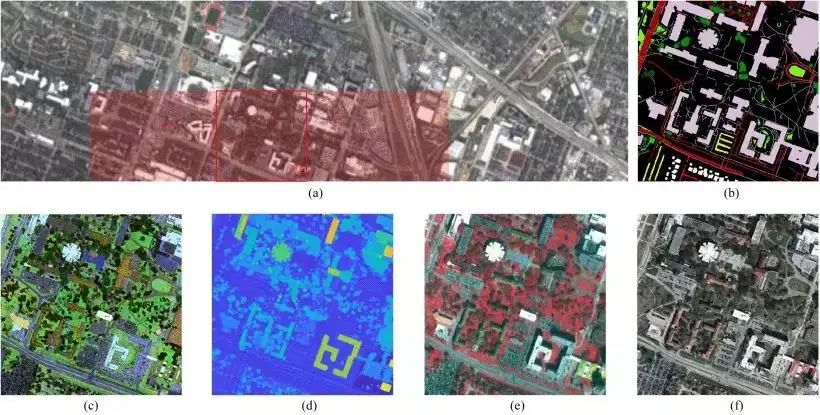
主题为高光谱数据和LiDAR数据的融合。包括空间分辨率均为2.5 m的高光谱图像和LiDAR衍生的数字地表模型(DSM),以及LiDAR点云数据。LiDAR数据获取时间为2012年6月22日,高光谱数据于2012年6月23日获取,其波谱范围为380 -1050 nm,分成144个波段。该数据集是在休斯顿大学校园和邻近市区范围内获取的,同时提供15种地面真实土地利用类别用于训练和测试。
主题为多源以及多分辨率数据的融合。数据集是在不同光谱范围和空间分辨率下获取的,包括一个较低分辨率的长波红外高光谱数据集和一个在可见光波长范围内获取的高分辨率数据集。前者是由一个84通道成像仪采集的,波长范围在7.8-11.5 μm,空间分辨率约为1 m;后者是空间分辨率为0.2 m的一系列彩色图像。成像时间为2013年5月21日,覆盖范围为靠近加拿大魁北克塞特福德矿场的城市区域,包括住宅和商业建筑,道路和花园,同时提供7种类别标签用于训练。
旨在探究RGB与LiDAR数据的融合。包括利用主动和被动传感器同时获取的两个数据集,获取时间为2011年3月13日,以300 m飞行高度的机载平台在比利时Zeebruges港口 (51.33°N, 3.20°E)采集。被动数据集是在可见光波长范围内获取的5 cm分辨率RGB正射影像;主动数据集为利用重复率、角度和频率分别为125 kHz, 20和49 Hz 采集的LiDAR数据,同时包括通过LiDAR点云数据获取的10 cm空间分辨率的数字表面模型。
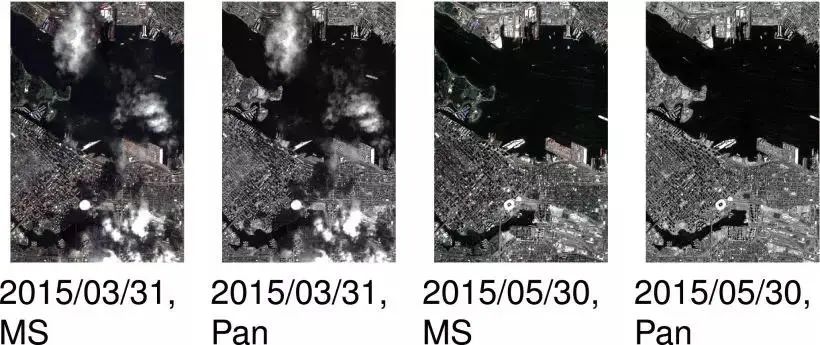
DFC 2016的数据集包括VHR图像和来自加拿大温哥华市区和港口区域(49°15'N, 123°6'W)的空间视频数据。VHR图像为DEIMOS-2标准产品,包括1 m空间分辨率的全色图像与4 m空间分辨率的多光谱数据,成像时间分别为2015年3月31日和2015年5月30日。视频数据是安装在ISS Zvezda模块上的Iris摄像机获取的全彩超高清(UHD)视频,空间分辨率为1 m,时间分辨率为每秒三帧,每帧大小为3840×2160,覆盖范围为3.8 km×2.1 km。

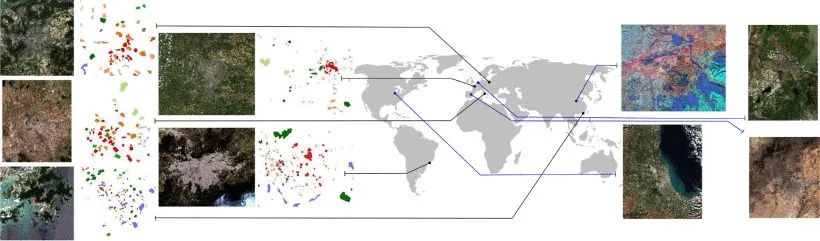
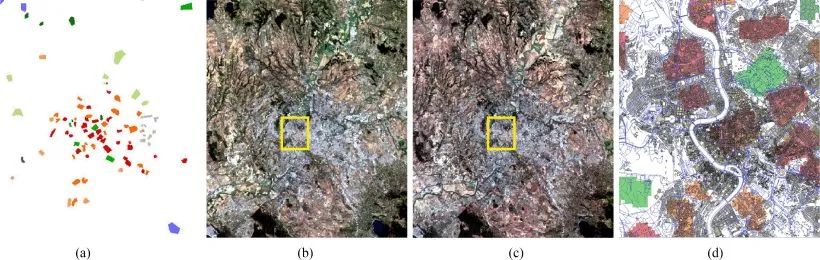
旨在解决基于多时相和多模态数据集的局部气候区分类问题。包括遥感数据(Landsat和Sentinel2)和矢量层(OSM)数据,以及在柏林、香港、巴黎、罗马、圣保罗5个城市中提供的17类地面参考。将Landsat8数据的可见光、短波以及长波红外重采样为100 m空间分辨率,Sentinel2将9个多光谱带,包括可见光,植被红色边缘和短波红外波长的空间分辨率重采样为100 m;OSM数据重采样为5 m栅格以便与遥感数据匹配;地面参考数据以100 mx100 m的栅格大小给出。


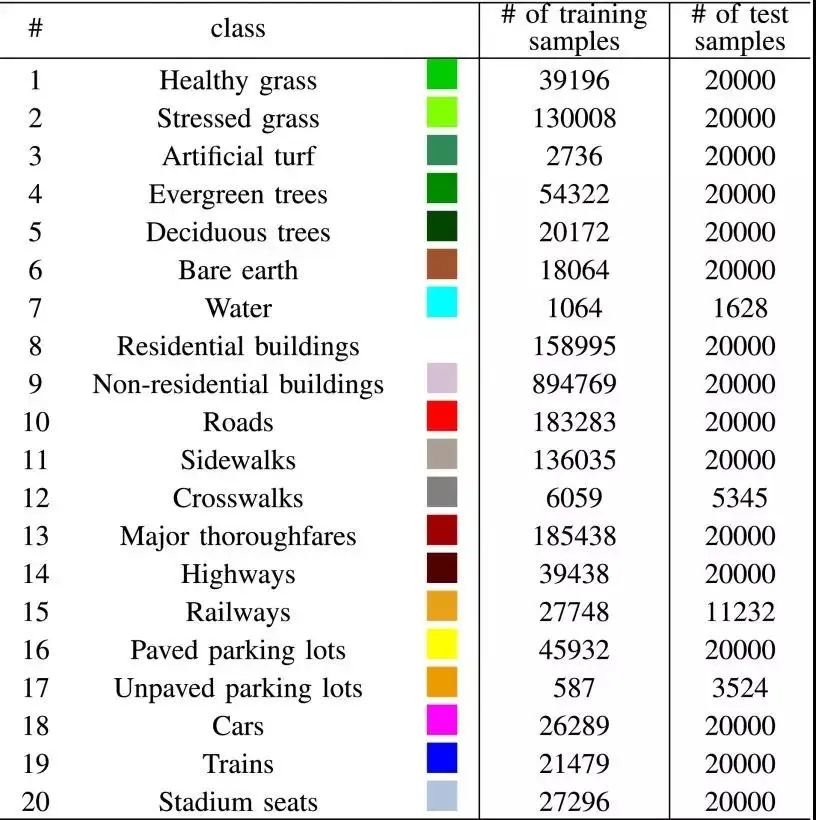
数据集包括多光谱LiDAR点云数据、高分辨率数据以及高光谱数据。数据采集时间为2017年2月16日,成像地点为休斯敦大学校园及其周边市区。多光谱LiDAR数据对应3种不同的激光波长(1550(#1,近红外),1064(#2,近红外)和532 (#3,绿光)nm),同时利用点云数据生成了7个LiDAR衍生产品,包括3个通道上的强度数据以及DSM和3种DEM数据,所有数据均被重采样为0.5 m,尺寸为8344×2404。高光谱数据的波谱范围为380-1050 nm,空间分辨率为1 m, 图像大小为4172×1202。高空间分辨率数据空间分辨率为5 cm, 大小为83440×24040, 将图像划分为14个(即7×2)图块后进行分配,每个图块的大小为11920×12020。参考数据包含20个类别,空间分辨率为0.5 m。
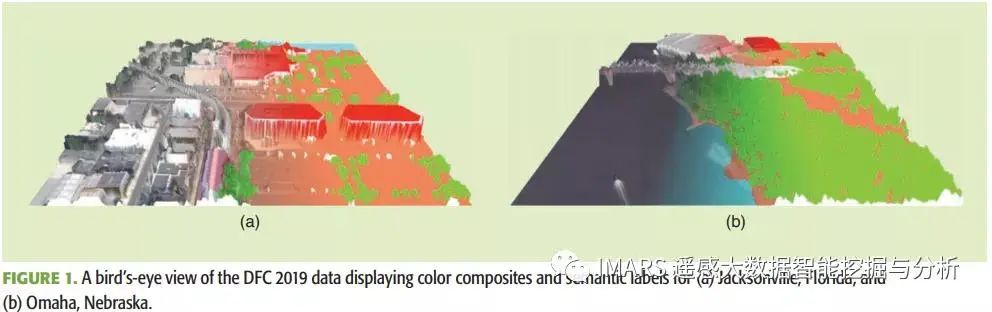
数据包括多日期的卫星影像、LiDAR数据以及语义标签。卫星影像包括WorldView-3全色和八波段可见光和近红外图像,其空间分辨率分别为0.35 m和1.3 m。LiDAR数据包括点云数据以及派生的DSM数据,空间分辨率为0.8 m。语义标签包括道路、建筑、桥梁、植被、地面以及水体等,既包含了语义地图也包含点云数据中点的标签。

特别鸣谢:本期微推资料由公众号IMARS遥感大数据智能挖掘与分析提供,联合《遥感学报》微信公众号共同推出。
申明:本期发布的网站内容均不代表本号观点,本号旨在提供参考素材以便学习交流。
往 期 推 荐

资源共享第三弹,统计资料精粹

资源分享第二弹,数据资料大荟萃

资源分享第一弹:在哪都能好好学
分享(一)高光谱遥感数据集

分享(二)LiDAR点云数据

分享(三)建筑物提取数据集

分享(四)场景分类数据集

分享(五)变化检测数据集

分享(六)语义分割数据集

编辑:薇薇
审校:雪儿
指导:梧桐君
声明
欢迎转载、转发本号原创内容,转载信息请与本号联系授权,标注原作者和信息来源为《遥感学报》。
本号转载信息旨在传播交流,其内容由作者负责,不代表本号观点。文中部分资料来源于网络,如涉及作品文字、图片等内容、版权和其他问题请在20日内与本号联系,我们将在第一时间处理。《遥感学报》拥有最终解释权。
微信加群
为便于学术交流,提供优质服务,《遥感学报》建立了微信群。需要加群的小伙伴,请加小编个人微信入群,并备注:姓名+单位。营销广告者勿扰。
微推转载、合作联系:
E-mail:jrs@radi.ac.cn 或 微信后台留言。


 投稿网站:http://www.jors.cn
投稿网站:http://www.jors.cn 好看就点这里哦
好看就点这里哦

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 7
7 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)