统计学习方法第十一章——条件随机场
11.1 概率无向图模型11.1.1 模型定义式子(11.3)推导补充P(Yv,YO∣YW)=P(Yv∣YW,YO)P(YO∣YW)=P(Yv∣YW)P(YO∣YW)\begin{aligned}P(Y_v,Y_O|Y_W)&=P(Y_v|Y_W,Y_O)P(Y_O|Y_W)\\&=P(Y_v|Y_W)P(Y_O|Y_W)\end{aligned}P(Yv,YO∣YW)=P
11.1 概率无向图模型
11.1.1 模型定义
式子(11.3)推导补充
P(Yv,YO∣YW)=P(Yv∣YW,YO)P(YO∣YW)=P(Yv∣YW)P(YO∣YW) \begin{aligned} P(Y_v,Y_O|Y_W)&=P(Y_v|Y_W,Y_O)P(Y_O|Y_W)\\ &=P(Y_v|Y_W)P(Y_O|Y_W) \end{aligned} P(Yv,YO∣YW)=P(Yv∣YW,YO)P(YO∣YW)=P(Yv∣YW)P(YO∣YW)
两边同时消去P(YO∣YW)P(Y_O|Y_W)P(YO∣YW),因此得到式子(11.3)
11.2 条件随机场的定义与形式
【例题】11.1
11.2.4 条件随机场的矩阵形式
这里主要记录一下矩阵的表示形式,另外两种是比较好理解的
对观测序列x的每一个位置i=1,2,⋯ ,n+1i=1,2,\cdots,n+1i=1,2,⋯,n+1,定义一个m阶矩阵(m是标记y的取值个数,yi−1和yiy_{i-1}和y_iyi−1和yi位置上均有m种取值),举例来说,当m=3时,除了i=1和i=n+1时,每个矩阵Mi(x)∈R3×3M_i(x)\in R^{3\times3}Mi(x)∈R3×3,如下图所示:

由上图知道第一个矩阵和最后一个矩阵不是m×mm\times mm×m的,然后参考统计学习书上的例子将其其余部分用0填充变成m×mm\times mm×m并且最后一个矩阵的元素应该为1,因为yn+1y_{n+1}yn+1只有一个状态stop。
【例题】11.2
矩阵M1(x),M2(x),M3(x)中的a,b,cM_1(x),M_2(x),M_3(x)中的a,b,cM1(x),M2(x),M3(x)中的a,b,c可以理解为上一章隐马尔可夫模型当中的状态转移矩阵中的值,例如a01a_{01}a01理解为前一个状态为0,转移到状态为1的概率为a01a_{01}a01,b,c同样理解,于是就可以理解M1(x),M2(x),M3(x),M4(x)M_1(x),M_2(x),M_3(x),M_4(x)M1(x),M2(x),M3(x),M4(x)为什么那样写了,至于为什么M4(x)中第一列的值为1M_4(x)中第一列的值为1M4(x)中第一列的值为1也很好理解,因为最后一个状态只能是stop,所以概率就为1了。

状态序列长度为3,每个状态有2种,所以总共有232^323种路径,解释一下下图的意思

例如a01b11c11a_{01}b_{11}c_{11}a01b11c11,首先start=0,所以开头都是从0开始,a01b11c11a_{01}b_{11}c_{11}a01b11c11表示的是第一个状态为1,第二个状态为1,第三个状态为1的概率。其他的类似解释,8条路径就把所有可能的路径例举完了。8个式子相加就是所有路径的非规范化概率之和,即规范因子Zw(x)Z_w(x)Zw(x),M1(x)M2(x)M3(x)M4(x)M_1(x)M_2(x)M_3(x)M_4(x)M1(x)M2(x)M3(x)M4(x)相乘的非零元素也会等于Zw(x)Z_w(x)Zw(x),可以自己验证下。
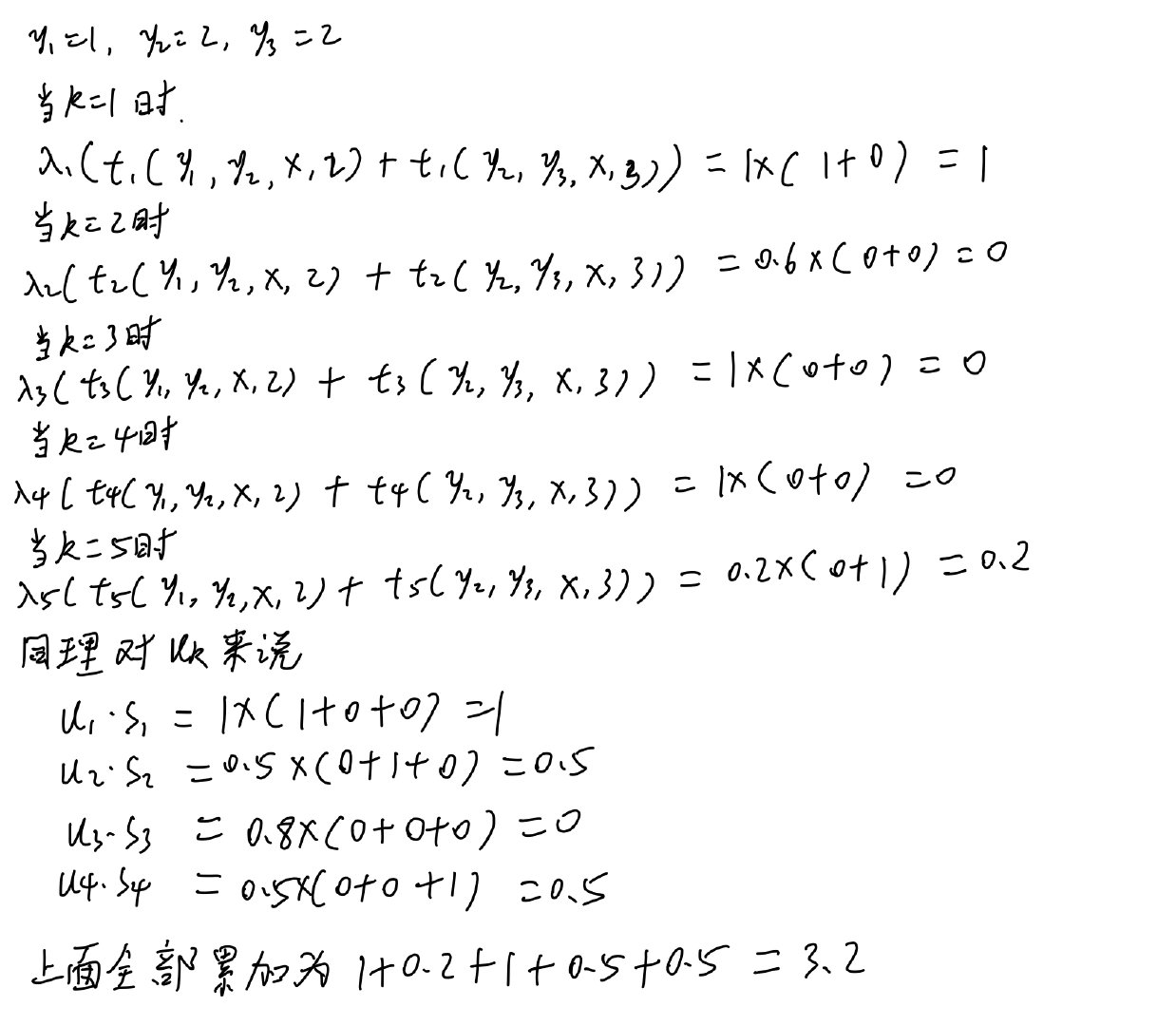
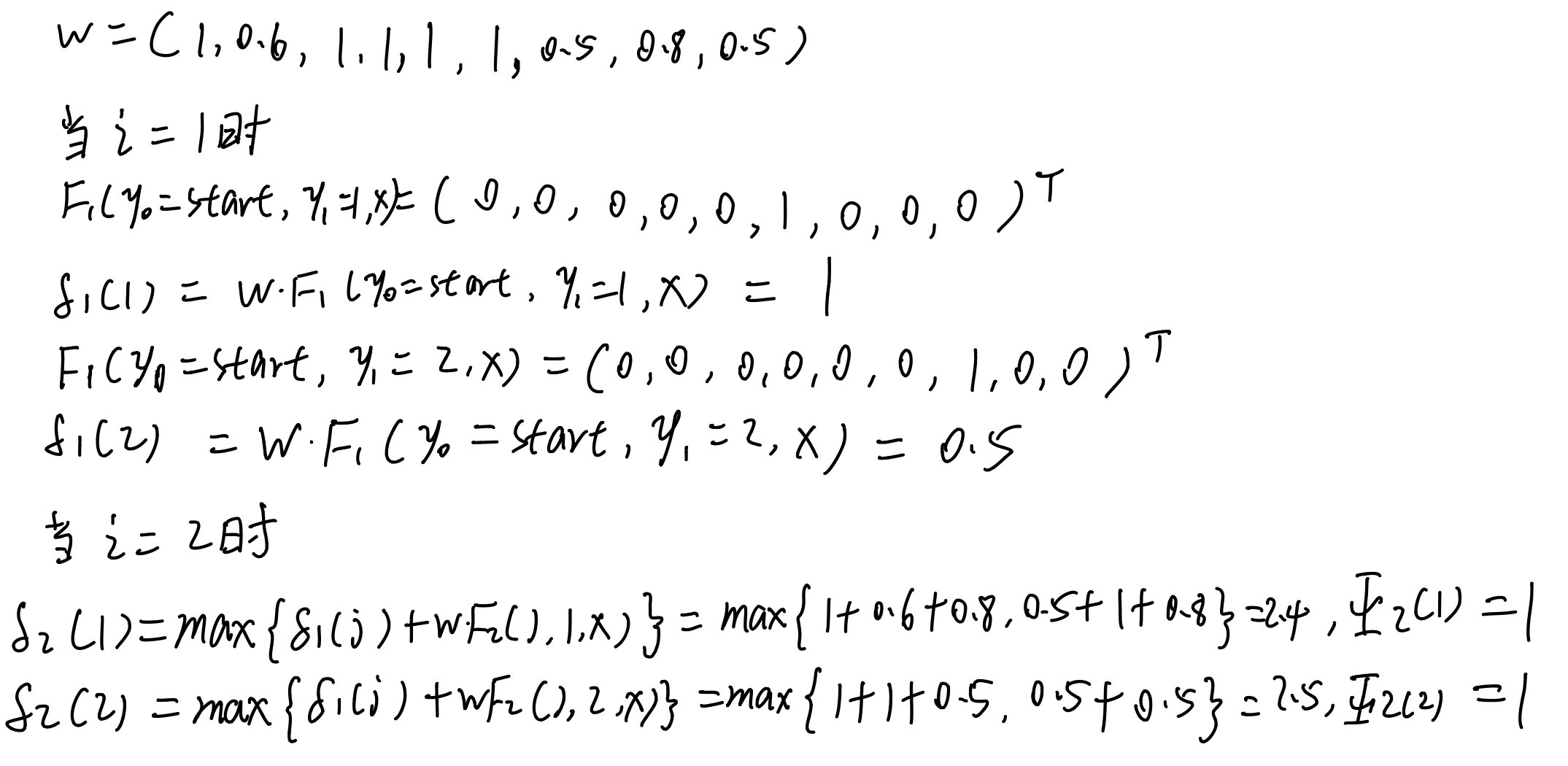
11.5条件随机场的预测算法
【例题】11.3


魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 0
0 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)