ICP算法步骤——matlab
这里主要是记录一下算法实现的步骤。公式推导:我将会放上课程的推导截图,以备查阅。一.公式的推导部分二.代码实现思路1.寻找点集%利用欧式距离找出对应点集 搜索每个点(这里是查找的对应点是直接查找的最近点)k=size(data_target,2);for i = 1:kdata_q1(1,:) = data_source(1,:) - data_target(1,i);% 两个点集中的......
·
这里主要是记录一下算法实现的步骤。
公式推导:我将会放上课程的推导截图,以备查阅。
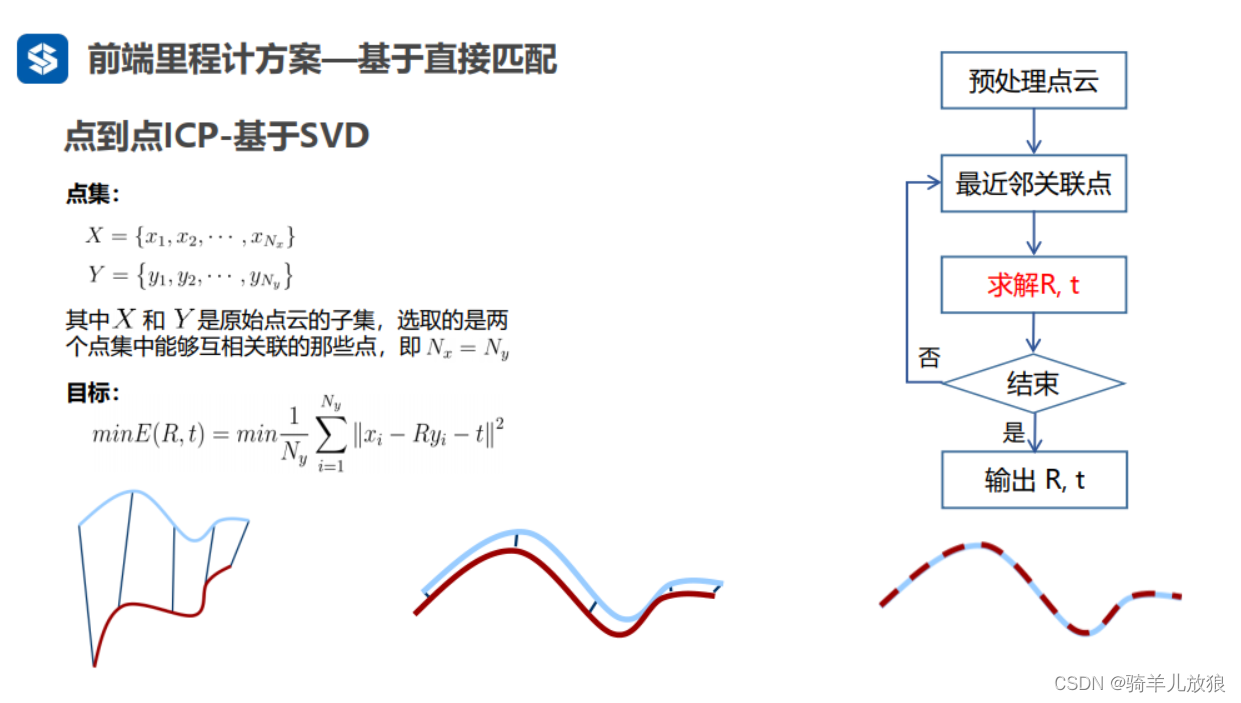
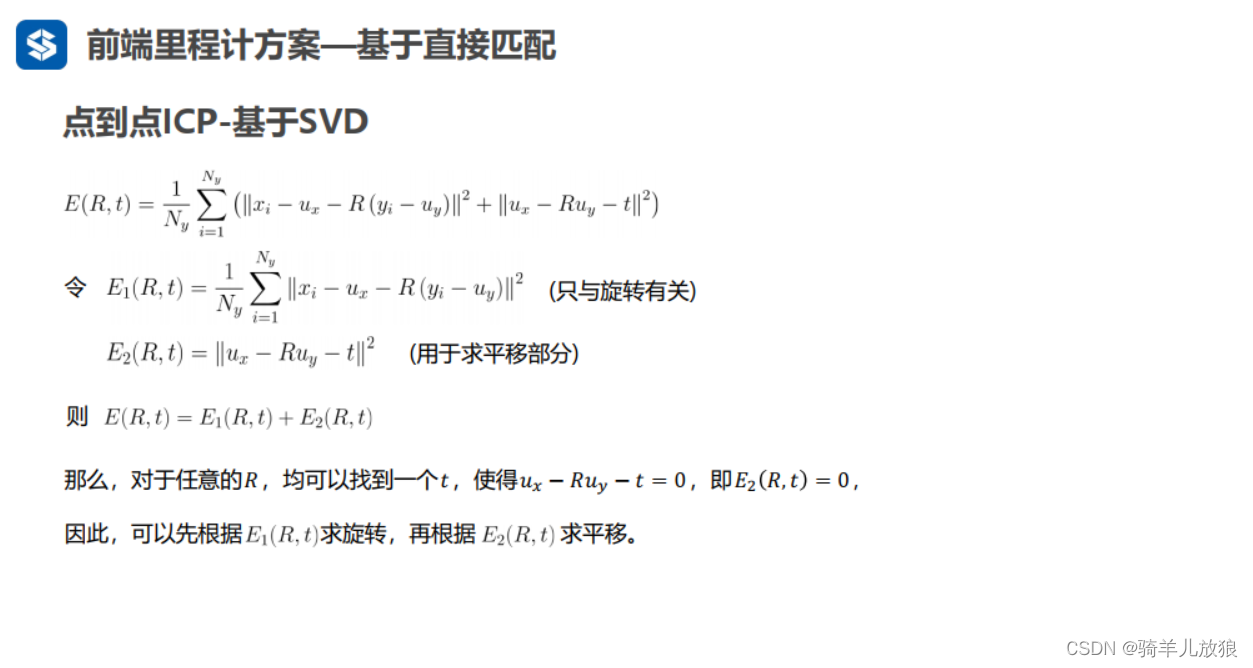
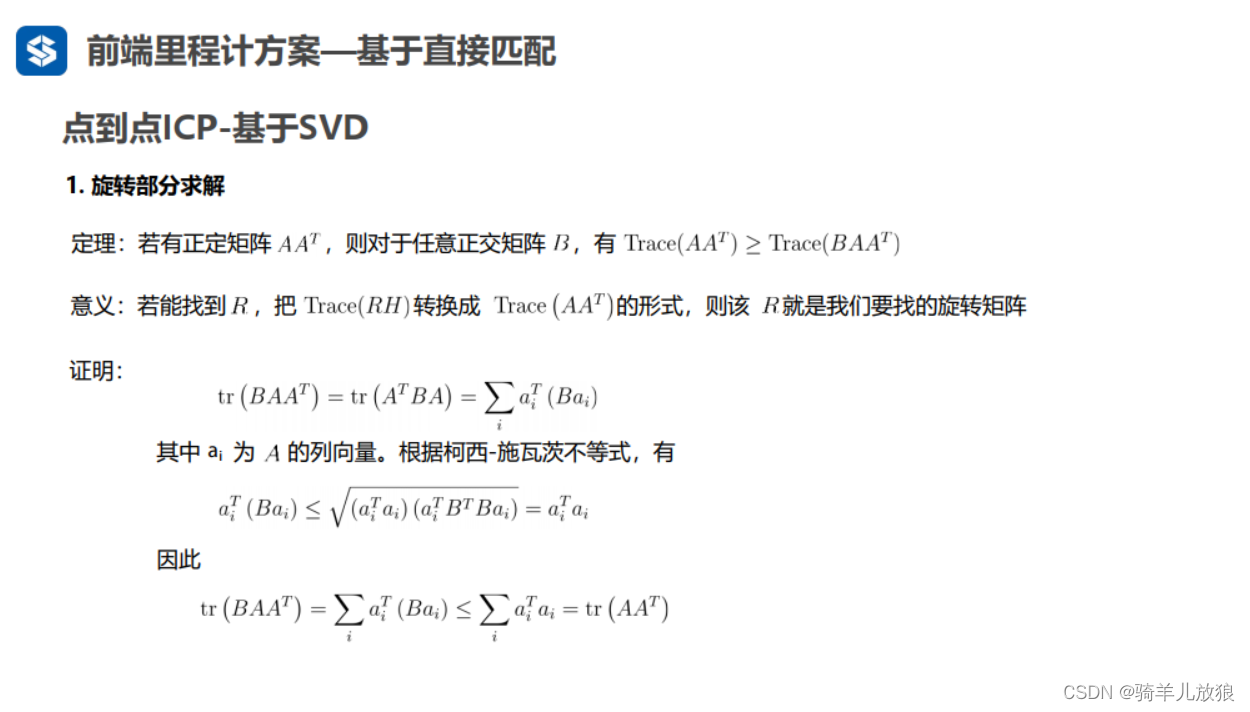
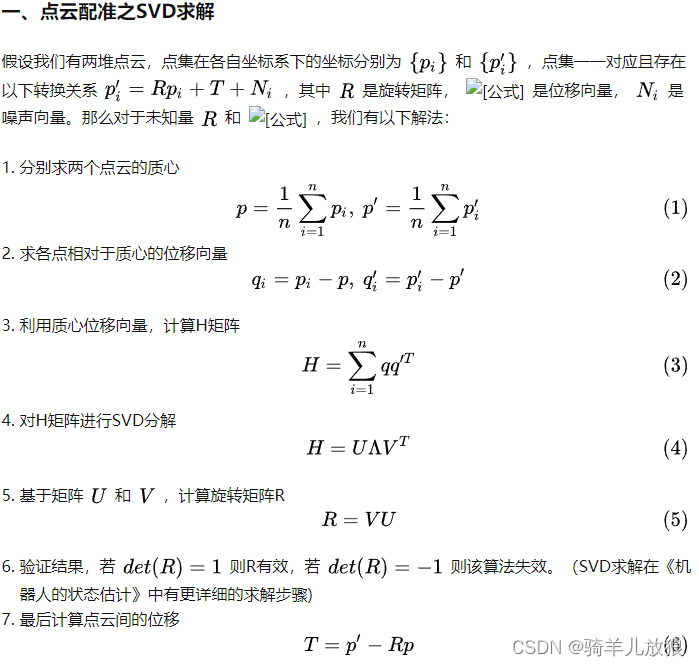
一.公式的推导部分
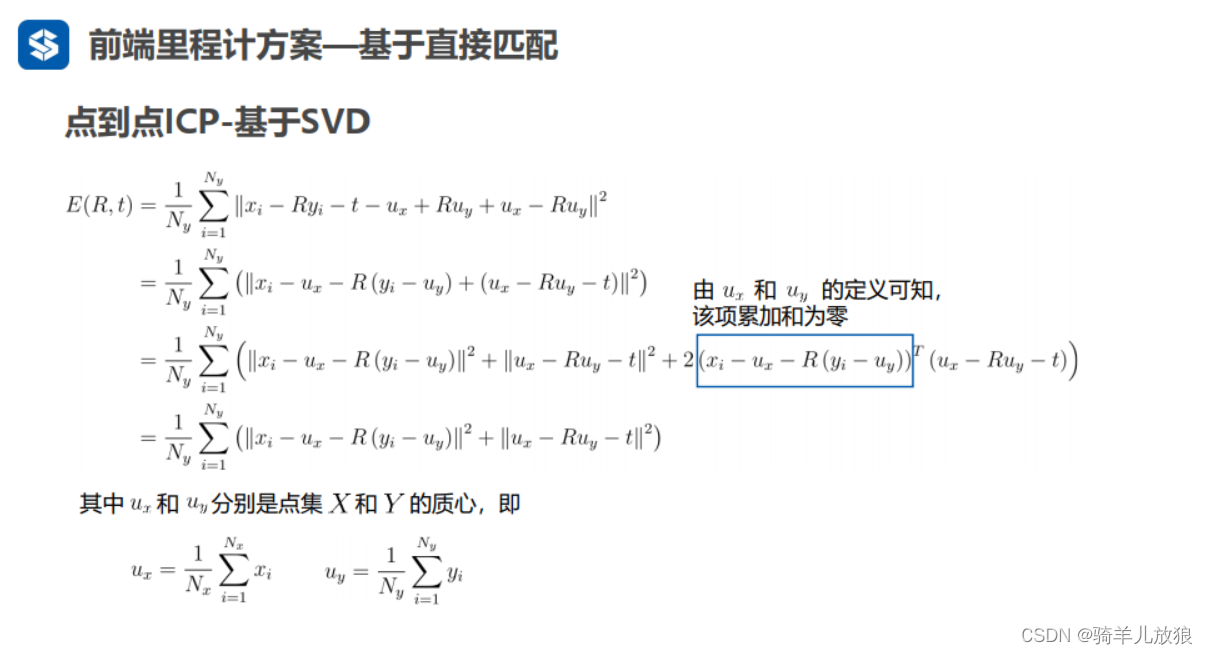
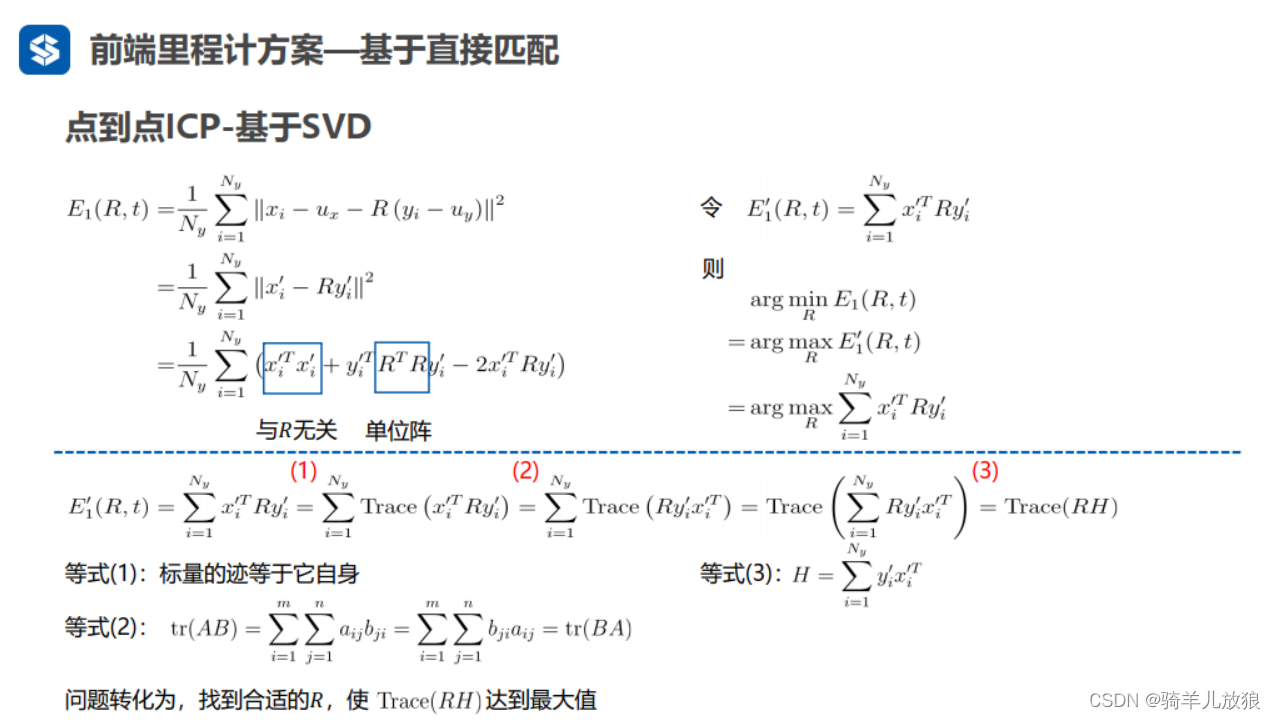
图中的第三个等号的备注:
二.代码实现思路
1.寻找点集
%利用欧式距离找出对应点集 搜索每个点(这里是查找的对应点是直接查找的最近点)
k=size(data_target,2);
for i = 1:k
data_q1(1,:) = data_source(1,:) - data_target(1,i); % 两个点集中的点x坐标之差,(将data_source的第一行整个数组与data_target(1,i)这个数作差)
data_q1(2,:) = data_source(2,:) - data_target(2,i); % 两个点集中的点y坐标之差
data_q1(3,:) = data_source(3,:) - data_target(3,i); % 两个点集中的点z坐标之差
distance = data_q1(1,:).^2 + data_q1(2,:).^2 + data_q1(3,:).^2; %存的欧氏距离(data_source数组里面的点与data_target数组里面的点之间的距离)
[min_dis, min_index] = min(distance); % 找到距离最小的那个点
data_mid(:,i) = data_source(:,min_index); % 将那个点保存为对应点——这个就是找的data_source对应点了(因为是3*n的矩阵,列表示xyz值,这里是等于直接把xyz赋值给了data_mid)
error(i) = min_dis; % 保存距离差值
end2.去中心化
%去中心化
% 质心
data_target_mean=mean(data_target,2);%求data_target每一行的平均数
data_mid_mean=mean(data_mid,2);%求data_mid每一行的平均数
data_target_c=data_target-data_target_mean*ones(1,size(data_target,2));%3*1 * 1*39856 = 3*39856 这是把之质心坐标复制成了39856份
data_mid_c=data_mid-data_mid_mean*ones(1,size(data_mid,2));3.求解H矩阵
x y 就是从点云里面找到互相对应的点集。
%SVD分解
W=zeros(3,3);
%计算协方差矩阵
for j=1:size(data_target_c,2)%取列数的大小遍历
W=W+data_mid_c(:,j)*data_target_c(:,j)';
end
[U,S,V]=svd(W);%这个W为什么要这么求?4.求解旋转平移
4.1 旋转
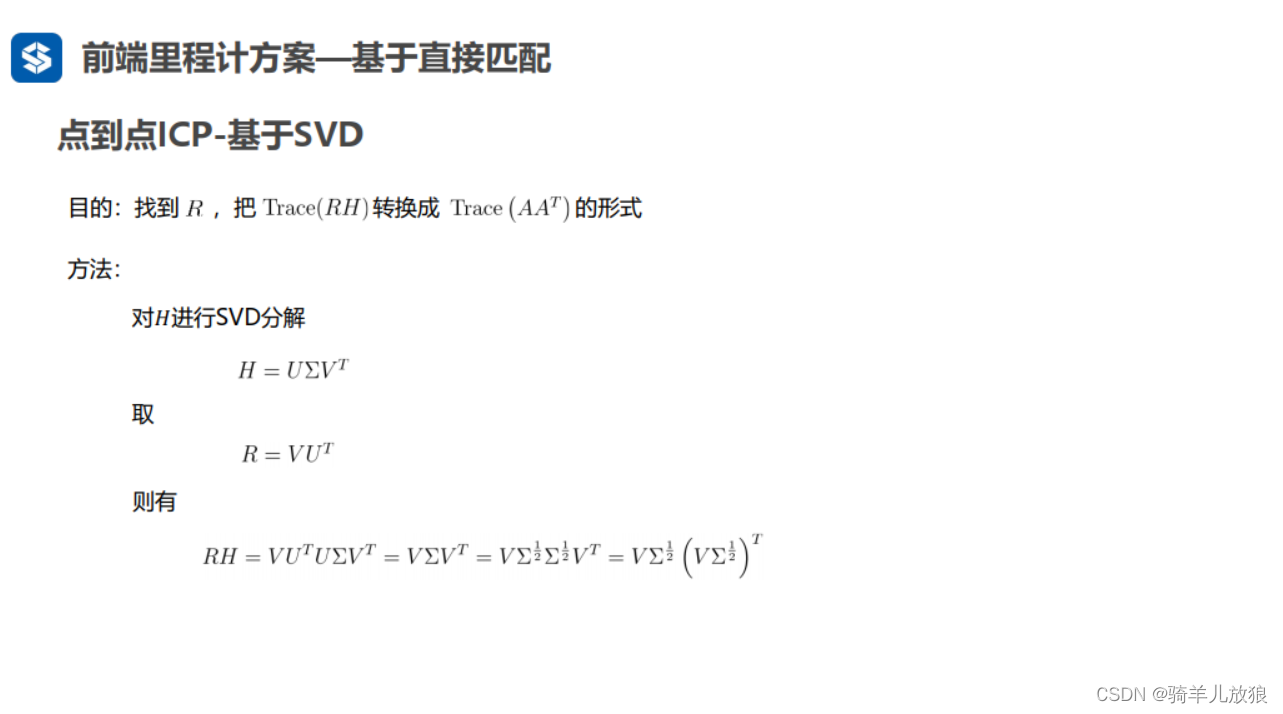
对第三步的H矩阵进行svd分解。
那么R就是svd分解其中的两个相乘的结果。
Rf=U*V';%两点云之间的旋转矩阵4.2 平移
即可得到平移量。
Tf=data_mid_mean-Rf*data_target_mean;%计算质心平移矢量(公式推导就是拿的质心相减的)所以以上总结下来的步骤得话,就如下:
三.全部代码
1.主函数
% ICP 算法
clear;
close all;
clc;
data_source=load('a.txt');
data_source=data_source';
x1=data_source(1,:);
y1=data_source(2,:);
z1=data_source(3,:);
data_source = [x1',y1',z1'];
%旋转角度
alpha = 0;
theta = 0;
grama = 0;
t=[1,1,30]; %平移向量
[data_target,T0] =rotate(data_source,alpha ,theta,grama,t);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%绘制两幅原始图像
x1=data_source(1,:);
y1=data_source(2,:);
z1=data_source(3,:);
x2=data_target(1,:);
y2=data_target(2,:);
z2=data_target(3,:);
figure(1);
title('初始位置');
scatter3(x1,y1,z1,'b*');
hold on;
scatter3(x2,y2,z2,'r*');
hold off;
T_final=eye(4,4); %旋转矩阵初始值
iteration=0;
Rf=T_final(1:3,1:3);
Tf=T_final(1:3,4);
data_target=Rf*data_target+Tf*ones(1,size(data_target,2)); %初次更新点集(代表粗配准结果)
err=1;
data_source = data_source';
while(err>0.0001)
iteration=iteration+1; %迭代次数
disp(['迭代次数ieration=',num2str(iteration)]);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%利用欧式距离找出对应点集 搜索每个点(这里是查找的对应点是直接查找的最近点)
k=size(data_target,2);
for i = 1:k
data_q1(1,:) = data_source(1,:) - data_target(1,i); % 两个点集中的点x坐标之差,(将data_source的第一行整个数组与data_target(1,i)这个数作差)
data_q1(2,:) = data_source(2,:) - data_target(2,i); % 两个点集中的点y坐标之差
data_q1(3,:) = data_source(3,:) - data_target(3,i); % 两个点集中的点z坐标之差
distance = data_q1(1,:).^2 + data_q1(2,:).^2 + data_q1(3,:).^2; %存的欧氏距离(data_source数组里面的点与data_target数组里面的点之间的距离)
[min_dis, min_index] = min(distance); % 找到距离最小的那个点
data_mid(:,i) = data_source(:,min_index); % 将那个点保存为对应点——这个就是找的data_source对应点了(因为是3*n的矩阵,列表示xyz值,这里是等于直接把xyz赋值给了data_mid)
error(i) = min_dis; % 保存距离差值
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%去中心化
% 质心
data_target_mean=mean(data_target,2);%求data_target每一行的平均数
data_mid_mean=mean(data_mid,2);%求data_mid每一行的平均数
data_target_c=data_target-data_target_mean*ones(1,size(data_target,2));%3*1 * 1*39856 = 3*39856 这是把之质心坐标复制成了39856份
data_mid_c=data_mid-data_mid_mean*ones(1,size(data_mid,2));
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%SVD分解
W=zeros(3,3);
%计算协方差矩阵
for j=1:size(data_target_c,2)%取列数的大小遍历
W=W+data_mid_c(:,j)*data_target_c(:,j)';
end
[U,S,V]=svd(W);%这个W为什么要这么求?
Rf=U*V';%两点云之间的旋转矩阵
Tf=data_mid_mean-Rf*data_target_mean;%计算质心平移矢量(公式推导就是拿的质心相减的)
err=mean(error);
T_t=[Rf,Tf];
T_t=[T_t;0,0,0,1];
T_final=T_t*T_final; %更新变换矩阵
disp(['误差err=',num2str(err)]);
disp('变换矩阵T=');
disp(inv(T_final));
data_target=Rf*data_target+Tf*ones(1,size(data_target,2)); %更新点集
if iteration >= 300
break
end
end
disp('真值');
disp(T0); %旋转矩阵真值,对矩阵求逆
x1=data_source(1,:);
y1=data_source(2,:);
z1=data_source(3,:);
x2=data_target(1,:);
y2=data_target(2,:);
z2=data_target(3,:);
figure(2);
title('配准后');
scatter3(x1,y1,z1,'r*');
hold on;
scatter3(x2,y2,z2,'b*');
hold off;2.函数
function [data_q,T] = rotate(data,x,y,z,t)
%欧拉角转旋转矩阵
x = x/180*pi;
y = y/180*pi;
z = z/180*pi;
Rx = [1 0 0;
0 cos(x) -sin(x);
0 sin(x) cos(x)];
Ry = [cos(y) 0 sin(y);
0 1 0;
-sin(y) 0 cos(y)];
Rz = [cos(z) -sin(z) 0;
sin(z) cos(z) 0;
0 0 1];
T = Rz*Ry*Rx; %旋转矩阵
T = [T(1,1),T(1,2),T(1,3),t(1);
T(2,1),T(2,2),T(2,3),t(2);
T(3,1),T(3,2),T(3,3),t(3);
0 0 0 1]; % 复合
rows=size(data,1);
rows_one=ones(rows,1);%创建一个rows行一列全是1的数组(ones的具体使用请查看文档 help ones)
%size(rows_one,1)%这是为了验证看看rows_one这个数组是不是自己想要的行和列
%size(rows_one,2)
data=[data,rows_one]; %化为齐次坐标
%size(data',1)
%size(data',2)
data_q=T*data';%把data专置,这样就变成了一列就是一个坐标点(即xyz的值),在加上一个1。这个1主要是去处理平移的,xyz是去处理旋转的。
data_q=data_q(1:3,:); %返回三维坐标
参考文章:(102条消息) ICP配准MATLAB实现_空的空sky的博客-CSDN博客_icp matlab
点云配准之SVD解法的由来 - 知乎 (zhihu.com)
侵权请联系~

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 5
5 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)