做形态学方法的团队_图像分割实战-分水岭分割方法和GrabCut 算法
1. 分水岭分割方法它是依赖于形态学的,图像的灰度等级不一样,如果图像的灰度等级一样的情况下怎么人为的把它造成不一样?可以通过距离变换实现,这样它们的灰度值就有了阶梯状的变换。风水岭算法常见的有三种方法:(1)基于浸泡理论的分水岭分割方法;(2)基于连通图方法;(3)基于距离变换的方法。OpenCV 中是基于距离变换的分割方法,就相当于我们的小山头(认为造成的)。 基本的步骤: 例子1 粘连对象分

1. 分水岭分割方法
它是依赖于形态学的,图像的灰度等级不一样,如果图像的灰度等级一样的情况下怎么人为的把它造成不一样?可以通过距离变换实现,这样它们的灰度值就有了阶梯状的变换。风水岭算法常见的有三种方法:(1)基于浸泡理论的分水岭分割方法;(2)基于连通图方法;(3)基于距离变换的方法。OpenCV 中是基于距离变换的分割方法,就相当于我们的小山头(认为造成的)。
基本的步骤:
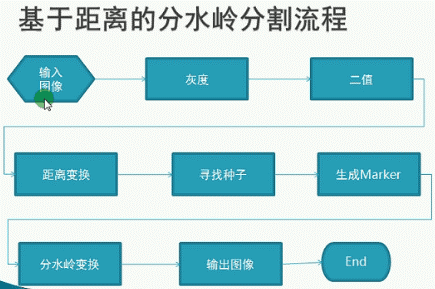
例子1 粘连对象分离和计数。
例子代码:
#include<opencv2/opencv.hpp>
#include<iostream>
using namespace std;
using namespace cv;
void test()
{
Mat srcImg;
srcImg = imread("pill_002.png");
if (srcImg.empty())
{
cout << "could not load image...n" << endl;
}
namedWindow("Original image", CV_WINDOW_AUTOSIZE);
imshow("Original image", srcImg);
Mat grayImg, binaryImg, shiftedImg;
//做滤波,使图像更加平滑,保留边缘,类似于双边滤波
pyrMeanShiftFiltering(srcImg, shiftedImg, 21, 51);
namedWindow("shifted", CV_WINDOW_AUTOSIZE);
imshow("shifted", shiftedImg);
cvtColor(shiftedImg, grayImg, COLOR_BGR2GRAY); //转为灰度图像
//二值化
threshold(grayImg, binaryImg, 0, 255, THRESH_BINARY | THRESH_OTSU);
namedWindow("binary", CV_WINDOW_AUTOSIZE);
imshow("binary", binaryImg);
//距离变换
Mat distImg;
distanceTransform(binaryImg, distImg, DistanceTypes::DIST_L2, 3, CV_32F);
//归一化,因为距离变换后得出来的值都比较小。
normalize(distImg, distImg, 0, 1, NORM_MINMAX);
namedWindow("distance", CV_WINDOW_AUTOSIZE);
imshow("distance", distImg);
//这个二值化的作用是寻找局部最大。
threshold(distImg, distImg, 0.4, 1, THRESH_BINARY);
namedWindow("distance_binary", CV_WINDOW_AUTOSIZE);
imshow("distance_binary", distImg);
//生成 marker
Mat distMaskImg;
// distImg 得到的是 0- 1之间的数,转化成8位单通道的。
distImg.convertTo(distMaskImg, CV_8U);
vector<vector<Point>>contours;
//找到 marker 的轮廓
findContours(distMaskImg, contours, RETR_EXTERNAL,
CHAIN_APPROX_SIMPLE, Point(0, 0));
//create marker 填充 marker
Mat markersImg = Mat::zeros(srcImg.size(), CV_32SC1);
for (int i = 0; i < contours.size(); i++)
{
drawContours(markersImg, contours, static_cast<int>(i),
Scalar::all(static_cast<int>(i)+1), -1);
}
circle(markersImg, Point(5, 5), 3, Scalar(255), -1);
//形态学操作 - 彩色图像,目的是去掉干扰,让结果更好。
Mat kernel = getStructuringElement(MORPH_RECT, Size(3, 3), Point(-1, -1));
morphologyEx(srcImg, srcImg, MORPH_ERODE, kernel);
//完成分水岭变换
watershed(srcImg, markersImg);
Mat mark = Mat::zeros(markersImg.size(), CV_8UC1);
markersImg.convertTo(mark, CV_8UC1);
bitwise_not(mark, mark, Mat());
namedWindow("watershed", CV_WINDOW_AUTOSIZE);
imshow("watershed", mark);
//下面的步骤可以不做,最好做出来让结果显示更美观。
//生成随机颜色
vector<Vec3b>colors;
for (int i = 0; i < contours.size(); i++)
{
int r = theRNG().uniform(0, 255);
int g = theRNG().uniform(0, 255);
int b = theRNG().uniform(0, 255);
colors.push_back(Vec3b((uchar)b, (uchar)g, (uchar)r));
}
//颜色填充和最终显示
Mat dstImg = Mat::zeros(markersImg.size(), CV_8UC3);
int index = 0;
for (int i = 0; i < markersImg.rows; i++)
{
for (int j = 0; j < markersImg.cols; j++)
{
index = markersImg.at<int>(i, j);
if (index > 0 && index <= contours.size())
{
dstImg.at<Vec3b>(i, j) = colors[index - 1];
}
else
{
dstImg.at<Vec3b>(i, j) = Vec3b(0, 0, 0);
}
}
}
cout << "number of objects:" << contours.size() << endl;
namedWindow("Final Result", CV_WINDOW_AUTOSIZE);
imshow("Final Result", dstImg);
}
int main()
{
test();
waitKey(0);
return 0;
}
效果:
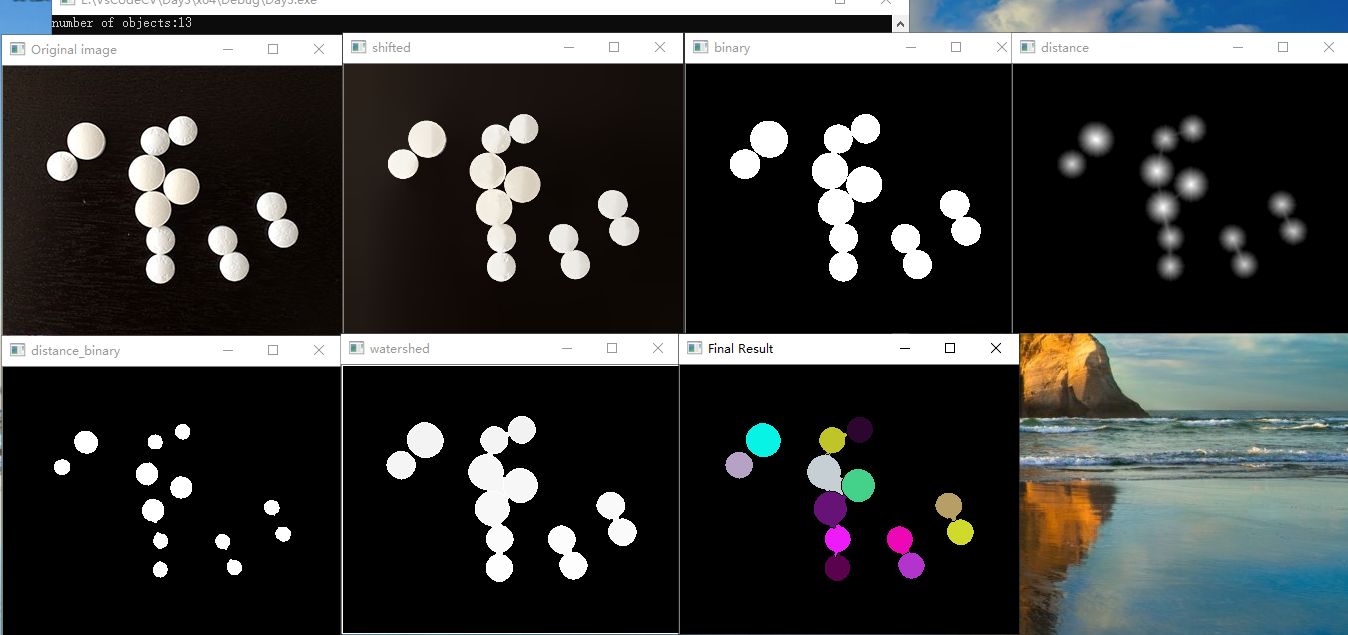
总结:有时候会导致碎片化,过度分割,因为二值化中如果有很多小的黑点或碎片,在分割的时候导致很多 mask ,即小山头太多了,这个时候我们要考虑怎么去合并它,可以通过联通区域的直方图,或者像素值均值相似程度等。
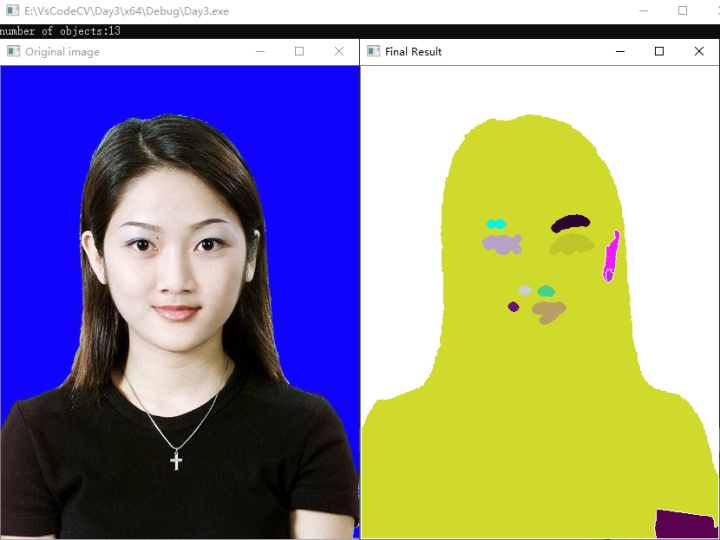
例子2:图像分割
#include<opencv2/opencv.hpp>
#include<iostream>
using namespace std;
using namespace cv;
//执行分水岭算法函数
Mat watershedCluster(Mat &srcImg, int &numSegments);
//结果显示函数
void DisplaySegments(Mat &markersImg, int numSegments);
void test()
{
Mat srcImg;
srcImg = imread("toux.jpg");
if (srcImg.empty())
{
cout << "could not load image...n" << endl;
}
namedWindow("Original image", CV_WINDOW_AUTOSIZE);
imshow("Original image", srcImg);
int numSegments;
Mat markers = watershedCluster(srcImg, numSegments);
DisplaySegments(markers, numSegments);
}
Mat watershedCluster(Mat &srcImg, int &numSegments)
{
//二值化
Mat grayImg, binaryImg;
cvtColor(srcImg, grayImg, COLOR_BGR2GRAY);
threshold(grayImg, binaryImg, 0, 255, THRESH_BINARY | THRESH_OTSU);
//形态学和距离变换
Mat kernel = getStructuringElement(MORPH_RECT, Size(3, 3), Point(-1, -1));
morphologyEx(binaryImg, binaryImg, MORPH_OPEN, kernel, Point(-1, -1));
Mat distImg;
distanceTransform(binaryImg, distImg, DistanceTypes::DIST_L2, 3, CV_32F);
normalize(distImg, distImg, 0.0, 1.0, NORM_MINMAX);
//开始生成标记
threshold(distImg, distImg, 0.1, 1.0, THRESH_BINARY);
normalize(distImg, distImg, 0, 255, NORM_MINMAX);
distImg.convertTo(distImg, CV_8UC1); //CV_32F 转成 CV_8UC1
//标记开始
vector<vector<Point>>contours;
vector<Vec4i>hireachy;
findContours(distImg, contours, hireachy, RETR_CCOMP, CHAIN_APPROX_SIMPLE);
if (contours.empty())
{
return Mat();
}
Mat markersImg(distImg.size(), CV_32S);
markersImg = Scalar::all(0);
for (int i = 0; i < contours.size(); i++)
{
drawContours(markersImg, contours, i, Scalar(i + 1), -1, 8, hireachy, INT_MAX);
}
circle(markersImg, Point(5, 5) ,3, Scalar(255), -1);
//分水岭变换
watershed(srcImg, markersImg);
numSegments = contours.size();
return markersImg;
}
void DisplaySegments(Mat &markersImg, int numSegments)
{
//生成随机颜色
vector<Vec3b>colors;
for (int i = 0; i < numSegments; i++)
{
int r = theRNG().uniform(0, 255);
int g = theRNG().uniform(0, 255);
int b = theRNG().uniform(0, 255);
colors.push_back(Vec3b((uchar)b, (uchar)g, (uchar)r));
}
//颜色填充和最终显示
Mat dstImg = Mat::zeros(markersImg.size(), CV_8UC3);
int index = 0;
for (int i = 0; i < markersImg.rows; i++)
{
for (int j = 0; j < markersImg.cols; j++)
{
index = markersImg.at<int>(i, j);
if (index > 0 && index <= numSegments)
{
dstImg.at<Vec3b>(i, j) = colors[index - 1];
}
else
{
dstImg.at<Vec3b>(i, j) = Vec3b(255, 255, 255);
}
}
}
cout << "number of objects:" << numSegments << endl;
namedWindow("Final Result", CV_WINDOW_AUTOSIZE);
imshow("Final Result", dstImg);
}
int main()
{
test();
waitKey(0);
return 0;
}
效果图:
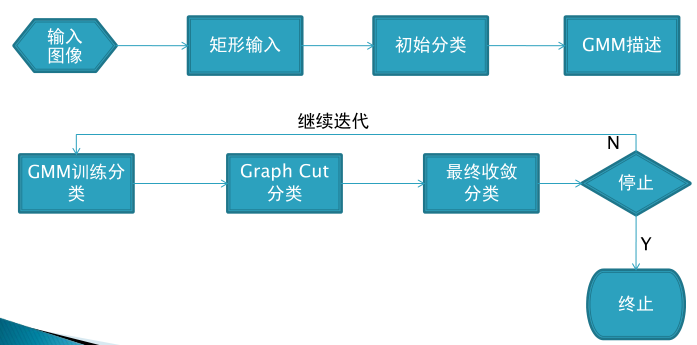
2. GrabCut 算法分割图像
GrabCut 算法的原理前面有介绍过,这里就不在介绍了,具体可以看下文章末尾往期推荐中阅读。下面例子实现图像中对象的抠图。
基本步骤:
例子代码:
#include<opencv2/opencv.hpp>
#include<iostream>
using namespace std;
using namespace cv;
int numRun = 0; //算法迭代次数
bool init = false;
Rect rect;
Mat srcImg, MaskImg, bgModel, fgModel;
//鼠标回调函数
void onMouse(int event, int x, int y, int flags, void* param);
void showImg(); //显示画的图片
void setRoiMask(); //选择 ROI 的函数
void runGrabCut(); //执行算法函数
static void ShowHelpText(); //提示用户操作函数
void test()
{
srcImg = imread("toux.jpg");
if (srcImg.empty())
{
cout << "could not load image...n" << endl;
}
namedWindow("Original image", CV_WINDOW_AUTOSIZE);
imshow("Original image", srcImg);
//初始化 mask,单通道 8 位
MaskImg.create(srcImg.size(), CV_8UC1);
//在不知道它是前景还是背景的情况下,把它全部设为背景。
MaskImg.setTo(Scalar::all(GC_BGD)); //结果不是 0 就是 1 GC_BGD为0
setMouseCallback("Original image", onMouse, 0);
while (true)
{
char c = (char)waitKey(0);
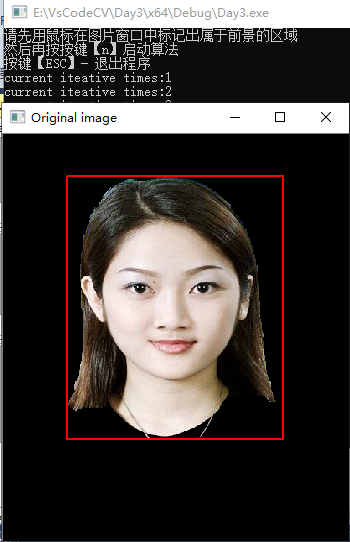
if (c == 'n') // 按下 n 建开始执行算法
{
runGrabCut();
numRun++;
showImg();
cout << "current iteative times:" << numRun << endl;
}
if (c == 27)
{
break;
}
}
}
void onMouse(int event, int x, int y, int flags, void* param)
{
switch (event)
{
case EVENT_LBUTTONDOWN:
rect.x = x;
rect.y = y;
rect.width = 1;
rect.height = 1;
break;
case EVENT_MOUSEMOVE:
if (flags& EVENT_FLAG_LBUTTON)
{
rect = Rect(Point(rect.x, rect.y), Point(x, y));
showImg();
}
break;
case EVENT_LBUTTONUP:
if (rect.width > 1 && rect.height > 1)
{
showImg();
}
break;
default:
break;
}
}
void showImg()
{
Mat result, binMask;
binMask.create(MaskImg.size(), CV_8UC1);
binMask = MaskImg & 1;
if (init)
{
srcImg.copyTo(result,binMask);
}
else
{
srcImg.copyTo(result);
}
rectangle(result, rect, Scalar(0, 0, 255), 2, 8);
namedWindow("Original image", CV_WINDOW_AUTOSIZE);
imshow("Original image", result);
}
void setRoiMask()
{
//GC_BGD = 0 明确属于背景的像素
//GC_FGD = 1 明确属于前景的像素
//GC_PR_BGD = 2 可能属于背景的像素
//GC_PR_FGD = 3 可能属于前景的像素
MaskImg.setTo(GC_BGD);
//为了避免选择越界
rect.x = max(0, rect.x);
rect.y = max(0, rect.y);
rect.width = min(rect.width, srcImg.cols - rect.x);
rect.height = min(rect.height, srcImg.rows - rect.y);
//把我们选取的那一块设为前景
MaskImg(rect).setTo(Scalar(GC_PR_FGD));
}
void runGrabCut()
{
if (rect.width < 2 || rect.height < 2)
{
return;
}
if (init)
{
grabCut(srcImg, MaskImg, rect, bgModel, fgModel, 1);
}
else
{
grabCut(srcImg, MaskImg, rect, bgModel, fgModel, 1, GC_INIT_WITH_RECT);
init = true;
}
}
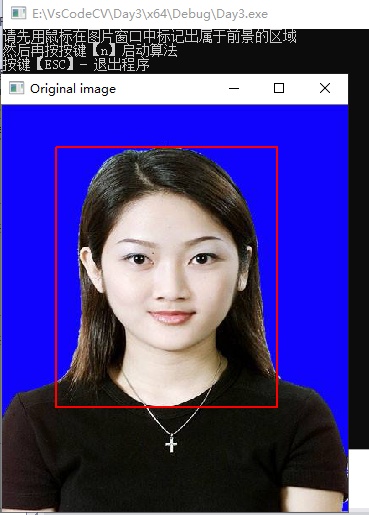
static void ShowHelpText()
{
cout << "请先用鼠标在图片窗口中标记出属于前景的区域" << endl;
cout << "然后再按按键【n】启动算法" << endl;
cout << "按键【ESC】- 退出程序" << endl;
}
int main()
{
ShowHelpText();
test();
waitKey(0);
return 0;
}
效果图:
欢迎关注我的微信公众号“OpenCV图像处理算法”,主要是记录自己学习图像处理算法的历程,包括特征提取、目标跟踪、定位、机器学习和深度学习,每一个例子都会提供源码和例子所用的资料,欢迎同行的同学关注我和我一起虚度光阴吧!!!

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 0
0 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)