【MATLAB源码-第236期】基于matlab的扩展卡尔曼滤波算法EKF目标追踪仿真,输出追踪轨迹图和定位误差。
扩展卡尔曼滤波(EKF)是一种针对非线性系统设计的状态估计算法,其基本原理是通过局部线性化,将非线性系统和观测方程转换为线性形式,以便应用卡尔曼滤波的理论。EKF结合了预测和更新两个步骤,通过迭代地调整状态估计,逐步逼近系统的真实状态。初始化步骤设定初始状态和噪声参数,是算法的起点。预测步骤利用动态模型和控制输入,估计下一时刻的系统状态,并更新协方差矩阵。更新步骤则结合观测数据,校正预测状态,并更
操作环境:
MATLAB 2022a
1、算法描述
扩展卡尔曼滤波(EKF)是一种用于处理非线性系统状态估计的滤波算法。它在卡尔曼滤波(KF)的基础上,通过局部线性化非线性系统模型,使其能够在非线性环境下有效运行。EKF主要包含四个核心步骤:初始化、预测、更新和数据融合。
初始化
初始化是EKF的第一步,涉及设定初始状态估计、初始协方差矩阵,以及过程噪声和观测噪声的协方差矩阵。
- 初始状态估计:根据系统的已知信息和初始条件,设定初始状态向量。
- 初始协方差矩阵:设定反映初始状态估计不确定性的协方差矩阵。
- 过程噪声协方差矩阵:描述系统模型中的噪声特性。
- 观测噪声协方差矩阵:描述观测模型中的噪声特性。
预测步骤
预测步骤用于基于系统的动态模型和控制输入,预测下一个时间步的状态和协方差矩阵。这个步骤包含两个主要部分:
- 状态预测:使用非线性系统的动态模型,根据当前状态和控制输入,计算下一个时间步的预测状态。
- 协方差预测:计算状态转移矩阵的雅可比矩阵,并使用它来线性化系统方程,然后更新状态协方差矩阵,反映预测的不确定性。
更新步骤
更新步骤利用观测数据来修正预测状态,使估计值更加接近真实值。它也包括两个主要部分:
- 计算卡尔曼增益:首先计算观测模型的雅可比矩阵,用它来线性化观测方程。然后,利用预测协方差矩阵和观测噪声协方差矩阵,计算卡尔曼增益矩阵。
- 状态更新:使用卡尔曼增益矩阵,将观测值与预测值进行融合,修正预测状态,得到更新后的状态估计。更新状态协方差矩阵,反映修正后的不确定性。
数据融合
数据融合步骤在整个EKF过程中持续进行,涉及记录和管理每个时间步的状态估计、控制输入和观测值。这些数据用于后续的分析和可视化,以评估EKF的性能。
概念总结
扩展卡尔曼滤波(EKF)是一种针对非线性系统设计的状态估计算法,其基本原理是通过局部线性化,将非线性系统和观测方程转换为线性形式,以便应用卡尔曼滤波的理论。EKF结合了预测和更新两个步骤,通过迭代地调整状态估计,逐步逼近系统的真实状态。
初始化步骤设定初始状态和噪声参数,是算法的起点。预测步骤利用动态模型和控制输入,估计下一时刻的系统状态,并更新协方差矩阵。更新步骤则结合观测数据,校正预测状态,并更新协方差矩阵。数据融合步骤记录并管理所有估计和观测数据,便于后续分析和展示。
EKF通过将非线性系统模型线性化,结合卡尔曼滤波的优点,在处理非线性系统状态估计方面表现出色。它广泛应用于导航、目标跟踪和机器人定位等领域,具有很强的实用性和鲁棒性。在复杂环境下,EKF能够有效地融合多源信息,提高系统状态估计的准确性和稳定性。
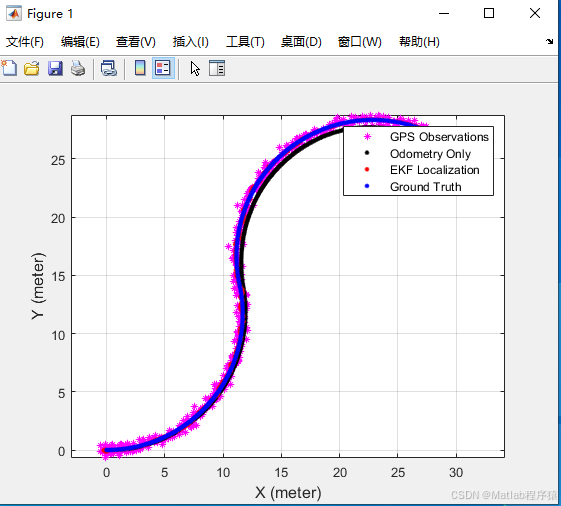
2、仿真结果演示
3、关键代码展示
略
4、MATLAB 源码获取
V
点击下方名片关注公众号获取

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐

 3
3 0
0- 0



 已为社区贡献78条内容
已为社区贡献78条内容

所有评论(0)