adis16448与MPU6050 无人机飞行对比测试
众所周知,一款好的imu对无人机姿态是多么的重要,曾经我们使用mpu6050、mpu9250等百元级的imu,这种imu在零偏、线性度、白噪声、温飘、轴间对齐、scale线性度等方面都显得力不从心。ardupilot、px4等固件不得不使用大量的低通滤波器来过滤噪声,达到了感觉上飞的还不错的程度。但是在对无人机姿态要求比较高的情况下,特别是在工业应用中,显然像mpu6050这类IMU是无法满足我.
众所周知,一款好的imu对无人机姿态是多么的重要,曾经我们使用mpu6050、mpu9250等百元级的imu,这种imu在零偏、线性度、白噪声、温飘、轴间对齐、scale线性度等方面都显得力不从心。ardupilot、px4等固件不得不使用大量的低通滤波器来过滤噪声,达到了感觉上飞的还不错的程度。
但是在对无人机姿态要求比较高的情况下,特别是在工业应用中,显然像mpu6050这类IMU是无法满足我们要求的。这次我们就尝试把ADIS16448这款低成本高精度的IMU融合无人机上,当然,因为这款IMU在ardupilot固件中缺乏驱动无法直接使用,加之我手上刚好在做多传感器融合的方案,所以直接就用自己写的tbus-tiny_ekf来做这次的融合,大家如果有时间也可以尝试自己写驱动来测试看看。
ADIS16448简介
adis16448,是analog device公司面向市场的千元级低成本10自由度惯性导航产品,内置3轴陀螺仪、3轴加速度计、3轴磁力计、1个气压计。内置的所有传感器都有严格的工厂校准(到手就可以用啦-_-,再也不担心找不到重力矢量)
tips:气压计有点坑,暂时还是推荐使用ms5611比较靠谱
一、波形图对比
接下来我们通过波形对比来了解这款高精度IMU(本篇测试皆采用linux实时飞控板ALICE):
<注:图中绿色为ADIS16448,红色为MPU6050>
静止状态
图一:加速度计白噪声对比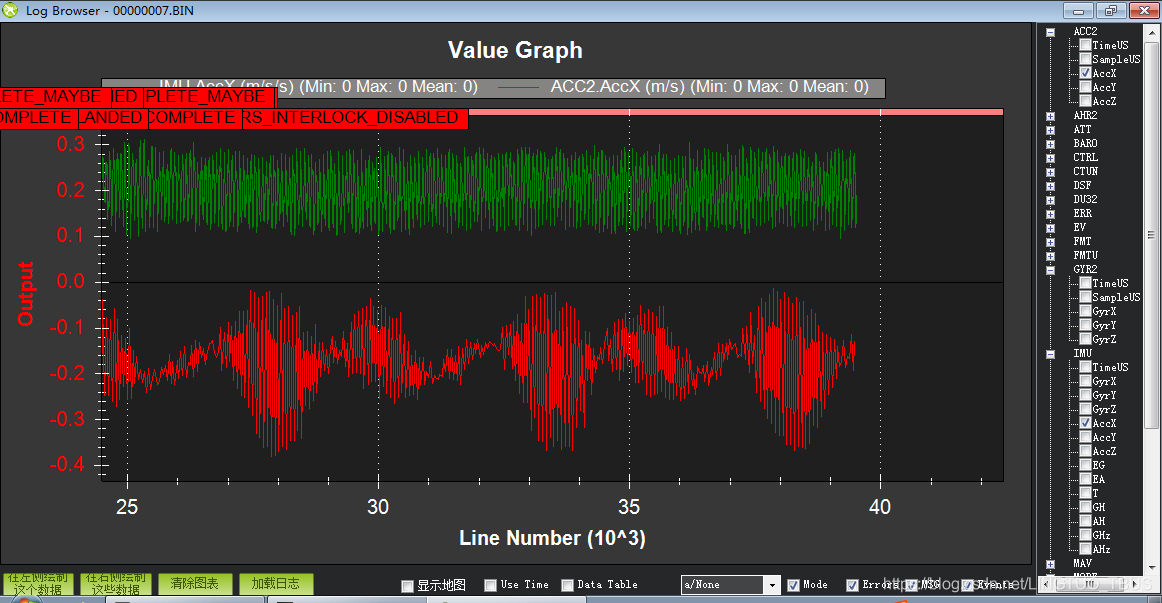
图二:陀螺仪白噪声对比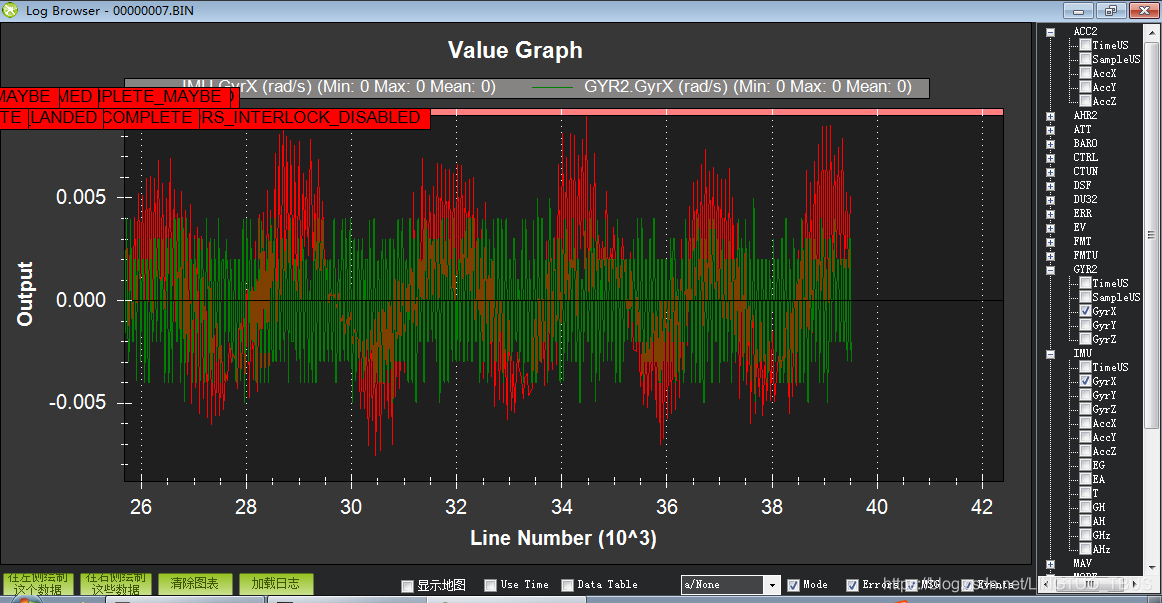
悬停状态
图三:加速度计白噪声对比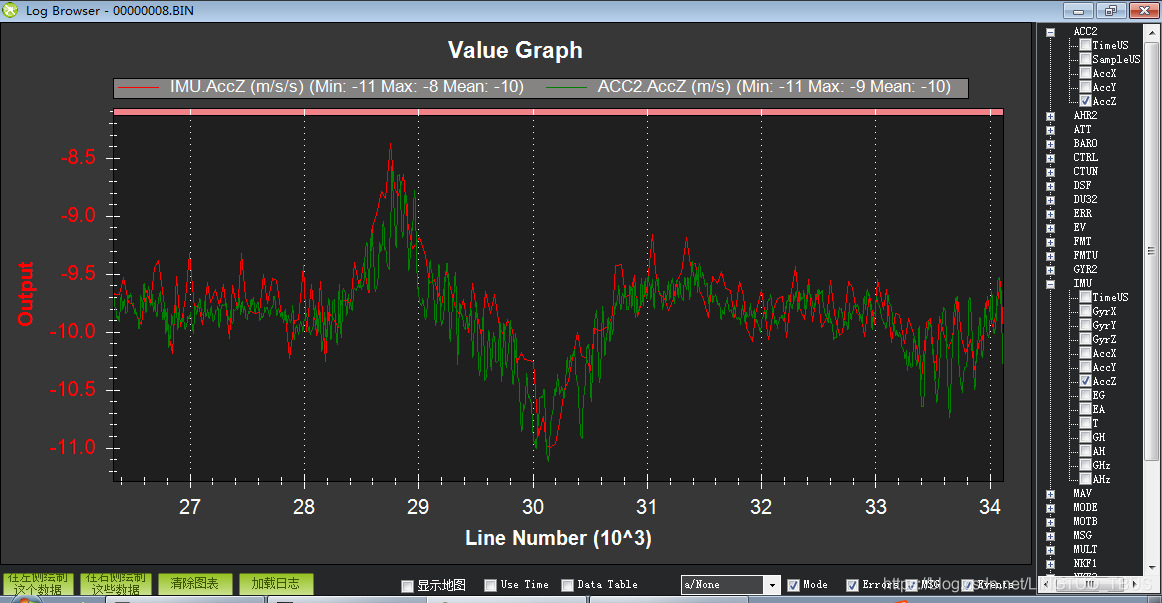
图四:陀螺仪白噪声对比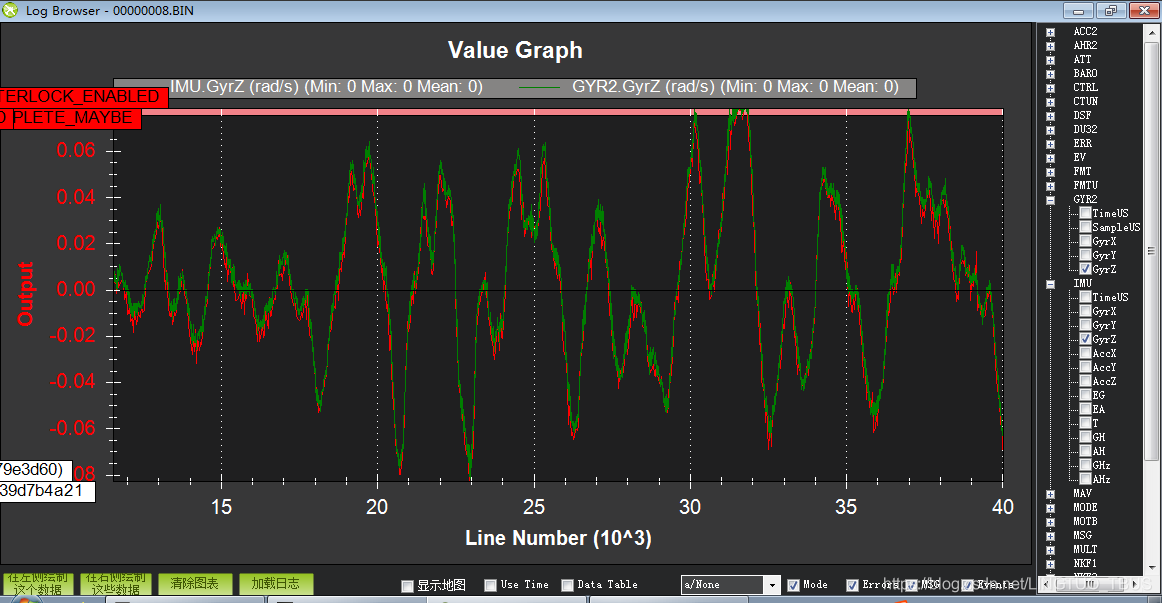
注:很抱歉,L君暂时无法解释为什么MPU6050 GYRO ACCEL均呈现类似正弦波的波形,也无法解释这种波形到底是好还是不好,不过看起来并非原始数据,有点像是经过了滑动窗口滤波以后呈现的波形,然而反观ADIS呈现出完美的正态分布,这正是EKF想要的数据!
综上图表我们可以看到:
- 大量滤波下来,imu数据会延时,即本时刻imu数据不反应真实时刻位姿,而是历史状态。
- 比较大的非线性噪声(非白噪声,由轴间误差、scale误差、帧间非线性误差引起)会对ekf造成比较大的估计偏差,有时甚至会引起ekf发散,再也无法估计状态。
- 由于EKF都是在一个延迟的时间轴上运行的,所有时间轴向前推移都依赖于IMU的数据,如果IMU数据质量不好,将会引起很大的误差。
- 为了应对这些问题,不得不对ekf打上茫茫多的patch,造成的代码难以理解和维护。
二、飞行测试视频
测试内容:adis16448 姿态模式飞行测试
测试环境:为了方便,就在室内测试了
测试飞控:linux实时飞控ALICE
测试目的:验证adis16448在tbus-tiny_ekf融合后的姿态实时性、稳定性
测试视频链接:https://www.bilibili.com/video/BV135411t7pm/
三、关于tbus-tiny_ekf
在这里给文中提到的tbus-tiny_ekf做一个解释,它是室内定位系统TSLAM2.0组件之一,主要是为了满足飞控融合多种传感器,比如惯导传感器、视觉、激光、里程计、RTK等多种设备。
tbus-tiny_ekf主要是为了满足这些需求而生:
- 重中之重:我们需要一份以人类能力能够看懂的滤波源码,需要对数学算法以及飞控逻辑做深度隔离。
- 我们需要的滤波器,能够尽可能方便的替换任何类型的传感器,而不应该陷入无穷无尽的函数嵌套。
- 我们的预测函数频率应该足够的高,而不能做:50hz的估计+400hz的控制。 滤波器应该尽量的短小精干,不做没必要的事情。
- 滤波器应该能及时的发现明显的传感器错误,在短时间内不受影响。
- 我们应该能自由操作开启滤波器的个数,方便对一些非常复杂的系统进行适配,比如rtk、视觉、激光、里程计等位置源的融合。
鉴于此,我们对ardupilot的卡尔曼滤波进行了重新打造,tbus-tiny_ekf便应运而生了~
tbus-tiny_ekf 19维状态变量
quaterion[4]//姿态
velocity[3]//速度
position[3]//位置
gyro_rate_bias[3]//陀螺仪零偏
accel_bias[3]//加速度计零偏
mag_bias[3]//磁力计零偏
tbus-tiny_ekf 6个更新函数
//水平速度更新
bool update_velocity_ne(float raw_velocity[2], float velocity_noise, float gate,float innovation[2], float varInnov[2], float watcher[2]);
//垂直速度更新
bool update_velocity_d(float raw_velocity, float velocity_noise, float gate,float& innovation, float& varInnov, float& watcher);
//水平位置更新
bool update_position_ne(float raw_position[2], float position_noise, float gate,float innovation[2], float varInnov[2], float watcher[2]);
//垂直位置更新
bool update_position_d(float raw_position, float position_noise, float gate,float& innovation, float& varInnov, float& watcher);
//偏航角更新
bool update_attitude_yaw(float raw_yaw, float yaw_noise, float gate,float& innovation, float& varInnov, float& watcher);
//磁力计更新
bool update_use_mag(float field[3], float mag_decl, float mag_noise, float gate,float& innovation, float& varInnov, float& watcher);
tbus-tiny_ekf 预测模型
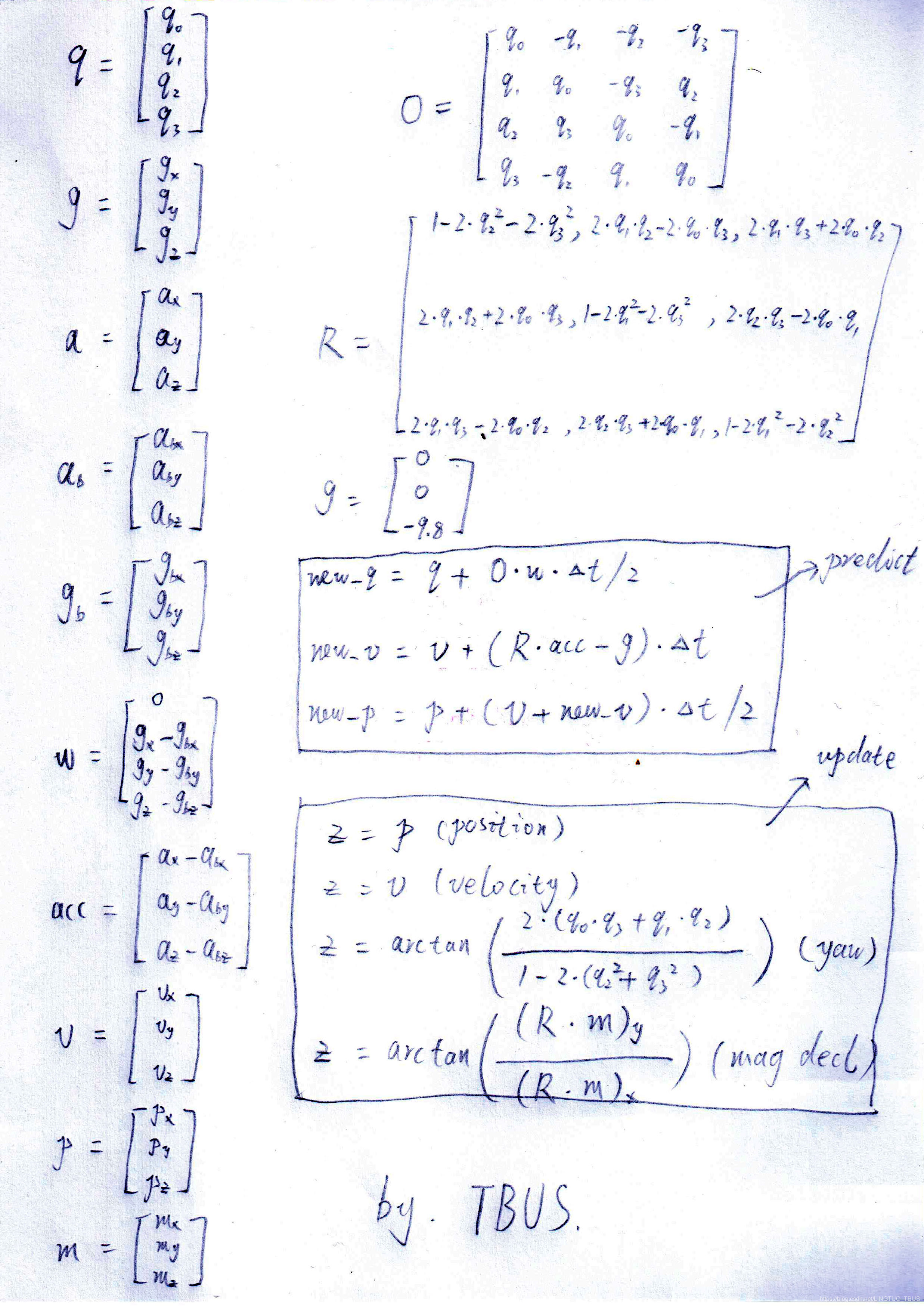
悬停波形图
原理说完了,来做一下实际测试
以下是tbus-tiny_ekf的悬停波形图:
注:
注1:由于图实在是太多了,就放几个代表一下,有兴趣的可以自己做测试,这里只放上DOWN方向位置的滤波后波形,以及DOWN方向新息。
注2:新息越小代表IMU精度越高,最好一条直线全0。
注3:阶梯状是因为我拉了几次油门。
图五:过EKF后DOWN方向位置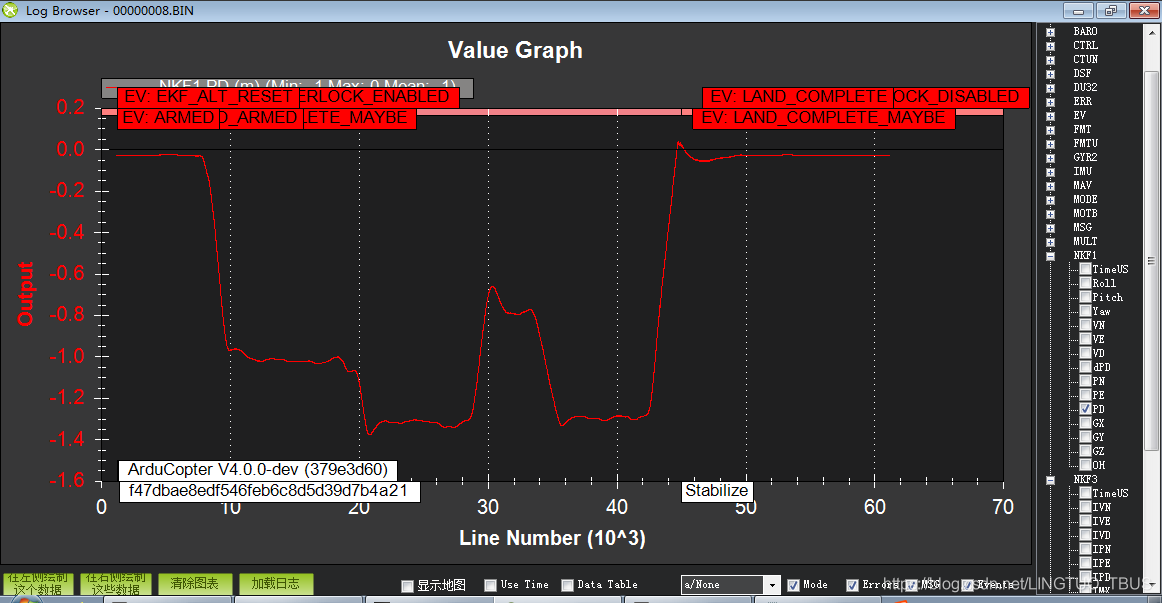
图六:过EKF后DOWN方向新息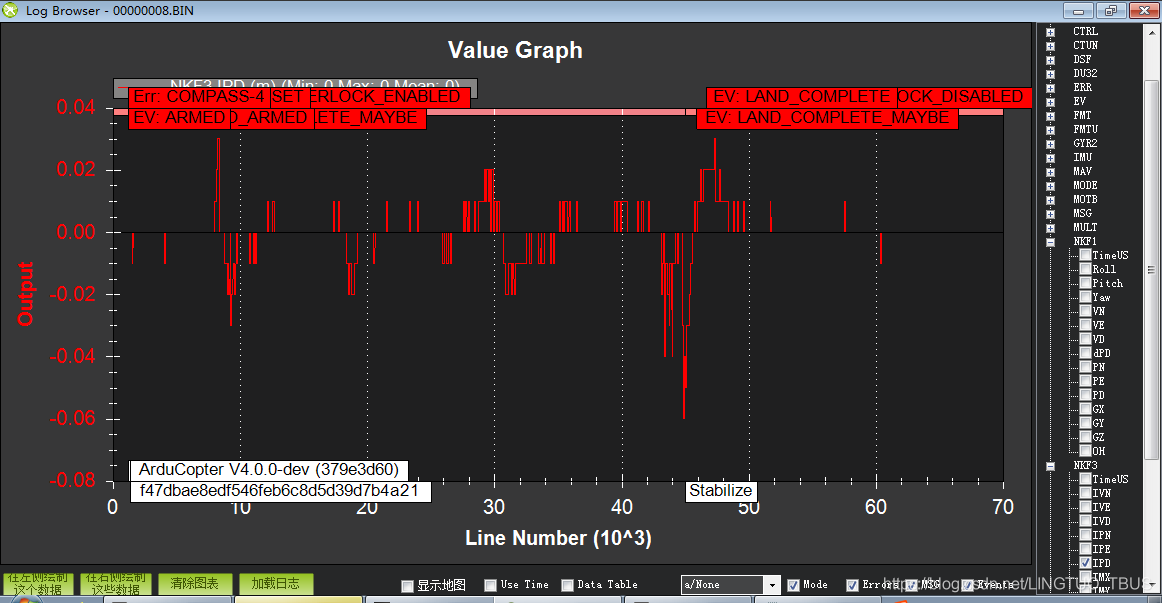
飞行对比测试视频
我们分别使用mpu6050和adis16448在定点模式下同时采用1.66hz的定位频率进行飞行测试。当然adis使用了全新的tbus-tiny_ekf,而mpu6050使用最新官方无删减无修改EKF。
注意:本次测试要求噪声必须是白噪声(不能是椒盐噪声),所以我们采用室内TSLAM激光定位,如果大家需要室外测试建议使用RTK进行定位。
1、mpu6050定点模式飞行测试视频(室内TSLAM激光定位)
https://www.bilibili.com/video/BV1zK4y1r7uW/
2、adis16448 定点模式飞行测试视频(室内TSLAM激光定位)
https://www.bilibili.com/video/BV1Ne41147MT/
可以看到ardupilot官方EKF+MPU6050就光定住就已经很难了,而tbus-tiny_ekf+adis16448不仅准确的定住了,甚至还可以慢速的走一走,完全没有发散的迹象!
FAQ
1.采用这么低的频率测试有什么意义吗?我们普通GPS也能达到5HZ频率呀?
L君:你应该想想高速飞行的场景,在高速场景下,IMU的数据质量就尤为重要了,一点点的积分误差都会导致估计的不准确。
2.为什么不采用高定位频率再测试呢?
L君:如果采用10HZ的室内满频率,肉眼实在无法看出MPU与ADIS有什么差别。并且,室内slam也是不允许你高速飞行的。
3.为什么一定是1.66HZ呢,其他频率测试不行吗?
L君:其实这个测试频率越低越容易说明问题,但是,如果低于1.66HZ ardupilot官方EKF+MPU6050飞起来那一瞬间,我就可以提控回家了。
4.这个测试说明了什么问题呢?
L君:这个测试说明了,adis完美的弥补了每两次定位信息之间的空白地带,至少在400ms之内的积分是准确无误的,而mpu会差很多,我估计最多只能弥补200ms的空白,并且出现的非线性波形会很大程度的影响最终的估计值。(注意:一个是最多,一个是至少)
OK,这次的测试就到这里,继续回去撸代码了…

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 3
3 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)