Classic AutoSAR架构基础入门(CP)
文章目录1.AutoSAR标准规范1.AutoSAR标准规范AUTOSAR主要分为三大层级:应用层(对应ASW)、RTE和基础软件BSW。主要模块如下图所示:从下至上Micorocontroller,硬件层,包括:CPU、Cache、SRAM内存、IO、外设(I2C,SPI,PWM)其余的部分作为第三层,称之为Basic Software基础软件(BSW)(1)System Services:包含
·
文章目录
1.AutoSAR标准规范
AUTOSAR主要分为三大层级:应用层(对应ASW)、RTE和基础软件BSW。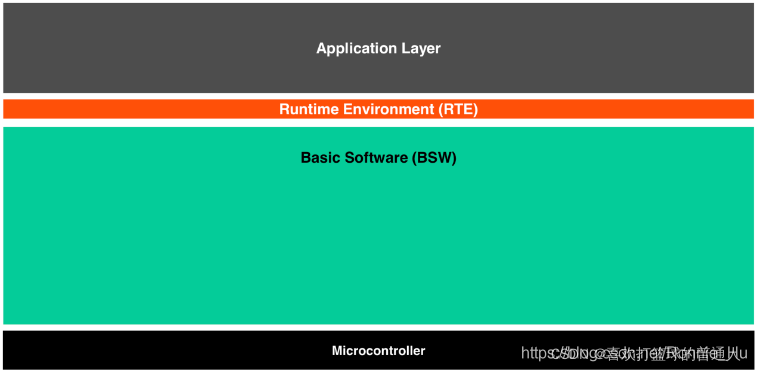
主要模块如下图所示: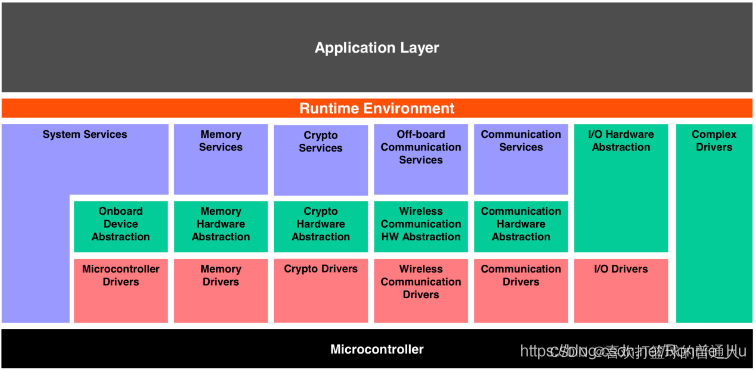
从下至上
- Micorocontroller,硬件层,包括:CPU、Cache、SRAM内存、IO、外设(I2C,SPI,PWM)
- 其余的部分作为第三层,称之为Basic Software基础软件(BSW)
(1)System Services:包含OS(管理中断、外设、任务调度);
(2)第1层,即最下面的红色框是驱动层,对任意寄存器的封装变成函数的参数(可以理解为寄存器到函数的映射,无业务逻辑),在AutoSar中称之为MCORE,由芯片厂商直接来做,对外提供成代码包
(3)第2层:即最下面的绿色部分是abstruct抽象层,对驱动层做了一次封装,对驱动层的任何一种设备,只关心其类型即可,不关心实际的是哪种外设使用哪种驱动
(4)第3层:系统服务层、5个,Memory Services(包括SRAM内存和Flash的管理)、Crypto Services(加密算法)、off board通信服务(与can总线不相关的通信)、Communication Services(组件内部的互相通信(盒子内部,类似Linux进程间通信机制IPC)、具有独立功能盒子ECU之间通过can总线进行通信(类似Linux之间使用以太网通信)) - Autosar最重要的两层是:第2层抽象层和第3层系统服务层
- Runtime Environment(第4层),RTE层,将Application、SW层与系统服务层做隔离,每个厂商只需要关注Application层的实现
- Application Layer(第5层),应用层,再autosar中称之为software compoment(软件组件SWC)
autosar开发特色
-
autosar要关注安全,要关注可复用性,所以需要借助工具来做配置,防止人为编写代码引入手工操作的错误
-
CP AutoSar是针对MCU的开发,AP AutoSar是针对Linux系统下开发的架构

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐

 1
1 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)