深入理解BFGS算法及其在Matlab中的实现
在数学优化领域,BFGS算法是一种用于解决非线性无约束优化问题的迭代方法,它通过构建近似Hessian矩阵,引导搜索方向以寻求目标函数的局部最小值。Broyden、Fletcher、Goldfarb以及Shanno这四位数学家于1970年代独立发明了这种算法,它是拟牛顿法(Quasi-Newton Methods)中最知名的一种。BFGS算法在许多工程、经济和科学问题中都有广泛应用,特别是在大规模

简介:BFGS算法是一种广泛应用于优化问题的拟牛顿方法,特别适合解决无约束问题。它通过构建近似的Hessian矩阵来加速梯度下降过程,比传统方法更快收敛。在MATLAB中,BFGS算法通过 fminunc 函数提供,该函数利用BFGS算法作为其求解器之一。算法的核心在于更新近似Hessian矩阵,这一过程依赖于迭代中的关键信息,如搜索方向、步长、梯度变化等。此外, basis2wy 函数可能在实现BFGS算法中扮演重要角色,通过WY表示法简化计算。该算法在实际应用中可能面临的挑战可通过MATLAB的参数和选项进行管理,从而确保快速且稳定的优化过程。 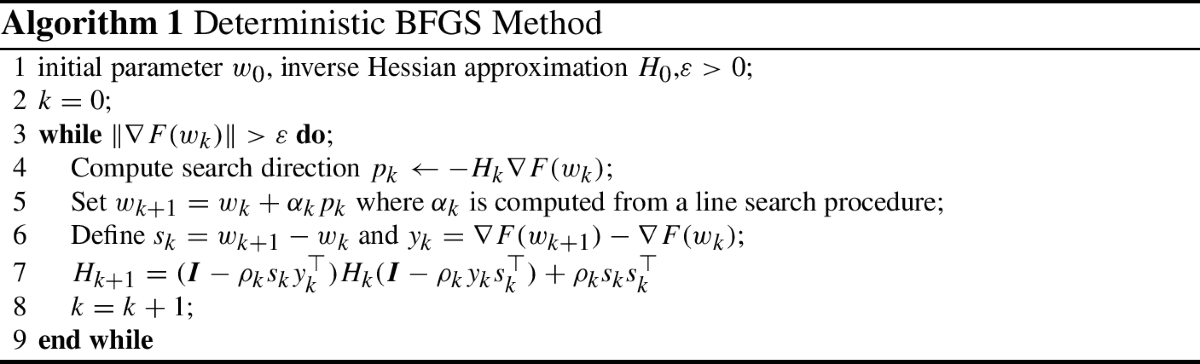
1. BFGS算法概述
在数学优化领域,BFGS算法是一种用于解决非线性无约束优化问题的迭代方法,它通过构建近似Hessian矩阵,引导搜索方向以寻求目标函数的局部最小值。Broyden、Fletcher、Goldfarb以及Shanno这四位数学家于1970年代独立发明了这种算法,它是拟牛顿法(Quasi-Newton Methods)中最知名的一种。BFGS算法在许多工程、经济和科学问题中都有广泛应用,特别是在大规模问题中,它不仅计算效率高,而且稳定性好,是优化领域的重要工具之一。
本章将介绍BFGS算法的基本概念,解释其工作原理,并概述其在无约束优化中的地位。读者将获得一个关于BFGS算法的初步了解,并为后续章节中对其深入分析和应用做好铺垫。
2. 拟牛顿法与无约束优化
拟牛顿法是一种用于解决无约束优化问题的迭代方法,其核心思想在于用一系列矩阵近似Hessian矩阵,从而避免直接计算Hessian矩阵及其逆矩阵,大幅降低计算成本。拟牛顿法包括多种具体的算法实现,如DFP、BFGS和L-BFGS算法等,其中BFGS算法以其优异的性能得到广泛使用。
2.1 拟牛顿法基础
2.1.1 拟牛顿法的定义和原理
拟牛顿法在迭代过程中不需要直接计算目标函数的二阶导数,而是通过迭代更新一个正定矩阵(通常是近似Hessian矩阵或其逆矩阵),利用这个矩阵的逆来生成新的搜索方向。每次迭代,这个矩阵都会被更新,以使得新的近似矩阵更好地符合目标函数的二阶性质。因此,拟牛顿法的核心在于寻找一个合适的矩阵更新策略,以确保算法的稳定性和效率。
2.1.2 拟牛顿法的优势和局限性
拟牛顿法相对于牛顿法的主要优势在于减少了计算复杂度,尤其是在高维问题中表现明显。牛顿法需要计算Hessian矩阵及其逆,这在维度增加时计算量呈指数级增长。拟牛顿法则通过迭代更新矩阵,从而避免了直接的高维矩阵运算。然而,拟牛顿法也存在局限性,比如当目标函数的Hessian矩阵变化剧烈时,拟牛顿法可能需要更多的迭代次数才能收敛。
2.2 无约束优化问题的界定
2.2.1 问题的数学表述
无约束优化问题通常表述为求解下列问题:
minimize f(x)
其中 f(x) 是定义在 R^n 上的连续可微函数,目标是找到使得 f(x) 最小的 x。通常假设 f(x) 在 R^n 上是凸函数,这保证了最小值的存在。
2.2.2 无约束优化问题的重要性
无约束优化问题在机器学习、经济模型、工程设计等诸多领域有着广泛的应用。这类问题的核心是寻找一个或多个参数的最优值,使得某一性能指标达到最佳。例如,在机器学习中,模型参数的优化就是一个典型的无约束优化问题。因此,研究无约束优化问题的求解方法,对于推动相关学科的发展具有重要意义。
3. 近似Hessian矩阵构建
3.1 Hessian矩阵的概念与意义
3.1.1 Hessian矩阵在优化中的作用
Hessian矩阵是一个多元函数的二阶偏导数组成的方阵,是多变量函数二阶泰勒展开的系数矩阵。在无约束优化问题中,Hessian矩阵与目标函数的局部性质密切相关。对于一个二阶可微的函数f(x),其Hessian矩阵记作H(f(x)),定义如下:
[ H(f(x))_{ij} = \frac{\partial^2 f(x)}{\partial x_i \partial x_j} ]
在优化领域,Hessian矩阵的一个核心作用是描述函数曲率。具体而言,如果函数在某点的Hessian矩阵是半正定的,则该点可能是局部最小值点;如果Hessian矩阵是半负定的,则该点可能是局部最大值点;如果Hessian矩阵既不半正定也不半负定,则该点可能是鞍点。因此,Hessian矩阵在确定搜索方向以及确定极值点的性质上起到了关键作用。
3.1.2 Hessian矩阵的计算挑战
尽管Hessian矩阵在理论上很优雅,但在实际计算中却面临诸多挑战。首先,对于高维问题,直接计算Hessian矩阵所需的二阶偏导数计算量巨大,这在计算资源和时间上都是不可接受的。其次,对于非凸函数,Hessian矩阵可能在不同点有不同性质,使得优化问题的全局分析变得复杂。最后,即使能计算出Hessian矩阵,其求逆或求伪逆也可能会导致数值稳定性问题,尤其是在Hessian矩阵接近奇异时。
3.2 构建近似Hessian矩阵的方法
3.2.1 初步近似与更新策略
由于直接计算Hessian矩阵的高成本和潜在的数值问题,实际应用中常常采用近似Hessian矩阵的方法。一种常见的方式是初始化一个正定矩阵作为Hessian矩阵的初步近似。例如,可以选择单位矩阵或者由一阶导数信息推导出的一个正定矩阵。
一旦有了初步近似,就需要一种有效的更新策略来迭代地改进这个近似矩阵,使其更接近真实的Hessian矩阵。拟牛顿法就提供了一种有效的更新机制,它们通过迭代地利用梯度信息来更新近似矩阵,而不直接计算Hessian矩阵。
3.2.2 BFGS算法中近似Hessian矩阵的更新
在BFGS算法中,近似Hessian矩阵的更新机制尤其值得注意。BFGS使用以下更新公式:
[ B_{k+1} = B_k + \frac{y_k y_k^T}{y_k^T s_k} - \frac{B_k s_k s_k^T B_k}{s_k^T B_k s_k} ]
其中,(B_k) 和 (B_{k+1}) 分别是第 (k) 次和第 (k+1) 次迭代的Hessian近似矩阵,(s_k) 是第 (k) 次迭代的步长,(y_k) 是对应于步长 (s_k) 的梯度变化,即 (y_k = \nabla f(x_{k+1}) - \nabla f(x_k))。
这个更新过程的关键之处在于它既考虑了函数梯度的变化,也保持了矩阵的正定性和对称性。BFGS算法的这种特性使其成为构建近似Hessian矩阵的一种高效方法,并在实际中广泛应用。
3.2.3 代码块和逻辑分析
下面是使用Python实现BFGS算法中更新近似Hessian矩阵的一个示例代码块,以及相应的逻辑分析。
def update_B(B, s, y):
"""
Update the Hessian approximation using the BFGS formula.
Parameters:
B: np.array
The current approximation to the Hessian.
s: np.array
The change in x from iteration k to k+1.
y: np.array
The change in the gradient from iteration k to k+1.
Returns:
B: np.array
The updated Hessian approximation.
"""
ys = y.dot(s)
if ys > 0:
# BFGS update formula
B = B + np.outer(y, y) / ys - np.dot(np.dot(B, s), np.dot(s, B)) / (s.dot(B).dot(s))
return B
在这个代码段中, B 代表了当前迭代步骤中的Hessian近似矩阵, s 是从当前迭代点到下一个迭代点的步长,而 y 则是该步长下目标函数梯度的变化量。 update_B 函数使用BFGS公式更新Hessian矩阵近似值。代码首先计算了 y 和 s 的点积 ys ,如果 ys 大于0,则保证了更新后的矩阵正定。然后,通过外积和矩阵乘法来更新矩阵 B 。
这段代码遵循了BFGS算法的数学定义,并且保证了更新后的矩阵保持对称性和正定性,这对于确保算法的迭代过程的稳定性和收敛性至关重要。在实际应用中,这一更新步骤会被反复执行,直到满足收敛条件,找到函数的局部最小值点。
4. BFGS算法关键更新公式
4.1 BFGS算法的迭代过程
BFGS算法(Broyden-Fletcher-Goldfarb-Shanno)是一种在优化问题中广泛应用的迭代方法,特别适用于大规模无约束非线性优化问题。这一节将深入探讨BFGS算法的迭代过程,包括算法的具体步骤和数学公式的详细推导。
4.1.1 算法步骤详解
BFGS算法的核心在于使用一个正定矩阵来逼近Hessian矩阵,该正定矩阵会根据迭代过程不断更新。其算法流程通常如下:
- 初始化一个正定矩阵 ( B_0 ) 作为Hessian矩阵的近似。
- 计算搜索方向 ( p_k = -B_k \cdot \nabla f(x_k) ),其中 ( f ) 是要最小化的函数,( \nabla f(x_k) ) 是函数在点 ( x_k ) 的梯度。
- 通过线搜索确定一个步长 ( \alpha_k )。
- 更新变量 ( x_{k+1} = x_k + \alpha_k p_k )。
- 计算新的梯度 ( \nabla f(x_{k+1}) )。
- 计算 ( B_{k+1} ),即更新正定矩阵。
- 检查收敛性,如果不满足收敛条件,则返回步骤2继续迭代。
- 如果满足收敛条件,则算法终止。
该过程利用了当前梯度和前一次迭代的信息,对近似Hessian矩阵进行更新,以便找到更优的搜索方向。
4.1.2 更新公式的数学推导
更新正定矩阵 ( B_k ) 是BFGS算法的核心,该更新过程需要确保新的矩阵 ( B_{k+1} ) 依然保持正定性。BFGS算法的更新公式为:
[ B_{k+1} = B_k + \frac{y_k y_k^T}{y_k^T s_k} - \frac{B_k s_k s_k^T B_k}{s_k^T B_k s_k} ]
其中:
- ( y_k = \nabla f(x_{k+1}) - \nabla f(x_k) )
- ( s_k = x_{k+1} - x_k )
这里 ( y_k ) 代表了函数梯度的变化量,( s_k ) 代表了 ( x ) 的变化量。通过这种方式,BFGS确保了 ( B_{k+1} ) 在正定性上与 ( B_k ) 保持一致。
为了确保新矩阵的正定性,有时会采用改进的BFGS更新公式(也称为PSB更新),其中对 ( y_k^T s_k ) 做了额外的检查,以避免除零错误:
[ B_{k+1} = B_k + \frac{y_k y_k^T}{y_k^T s_k} - \frac{B_k s_k s_k^T B_k}{s_k^T B_k s_k} \quad \text{if } y_k^T s_k > \epsilon_1 \text{ and } y_k^T s_k > \epsilon_2 y_k^T B_k y_k ]
这里 ( \epsilon_1 ) 和 ( \epsilon_2 ) 是两个很小的正常数。
4.2 BFGS算法的收敛性分析
BFGS算法的收敛性分析是理解算法效率和适用范围的关键。本小节将分析BFGS算法的收敛条件以及如何评估优化质量。
4.2.1 收敛条件的理论基础
在数学优化问题中,一个算法的收敛性指的是随着迭代次数的增加,算法所得到的解序列是否会趋于最优解或者满足某一精度要求的解。对于BFGS算法,有两个主要的收敛条件:
- 函数值的收敛:随着迭代的进行,函数 ( f(x_k) ) 的值应当逐渐减小,且最终趋于一个固定的值,该值对应着函数的局部最小值。
- 梯度的收敛:随着迭代的进行,梯度 ( \nabla f(x_k) ) 的范数应当逐渐趋近于零,表示在解的附近,函数的梯度非常平缓。
4.2.2 收敛速度和优化质量的评估
BFGS算法的收敛速度通常通过以下因素来评估:
- 算法的迭代次数:较少的迭代次数意味着较快的收敛速度。
- 函数值的下降情况:每次迭代函数值的下降量反映了算法的效率。
- 梯度范数的衰减:梯度的迅速减小表明解正在逼近最小值。
而优化质量可以通过以下指标来衡量:
- 算法终止条件:确定算法停止迭代的条件,如梯度的范数小于某一阈值或者函数值的变化非常小。
- 目标函数的最小值:计算的最优函数值与理论最小值的接近程度。
- 稳定性:在面对不同的初始点和不同的问题时,算法能否稳定地找到最优解。
通过这些评估指标,我们不仅可以衡量BFGS算法的性能,还可以指导我们在实际应用中如何设置参数来优化算法性能。在接下来的章节中,我们将探讨如何在Matlab环境中实现BFGS算法,并给出具体代码示例。
5. Matlab中BFGS算法的实现
在上一章节中我们讨论了BFGS算法中关键更新公式的细节和收敛性分析,现在我们转而探讨如何在Matlab中实现这一强大的算法。
5.1 Matlab编程环境简介
Matlab是一种高性能的数值计算环境和第四代编程语言,被广泛应用于工程计算、控制设计、信号处理、通信和图像处理等领域。它的一个显著特点是具有丰富的内置函数,可以轻松处理矩阵和向量运算。
5.1.1 Matlab的基本操作和特点
Matlab以其直观的语法和强大的图形功能而著称。它提供了一个集成的开发环境(IDE),其中包括编辑器、工作空间窗口、命令窗口以及用于图形显示和交互的图形窗口。此外,Matlab支持多种附加产品,如Simulink、Parallel Computing Toolbox等,可以进一步扩展其功能。
5.1.2 Matlab在科学计算中的应用
由于Matlab设计之初就是为了满足工程师和科研人员的需求,因此它在科学计算领域的应用十分广泛。Matlab能够方便地进行算法开发、数据分析、可视化、数值计算等任务,而且Matlab社区活跃,提供了大量的开源工具箱,方便用户分享和使用。
5.2 BFGS算法的Matlab实现步骤
5.2.1 实现前的准备工作
在开始编写BFGS算法之前,我们需要准备好测试问题。这里我们以一个二次函数为例,其表达式为f(x) = x1^2 + x2^2。我们的目标是找到该函数的最小值。
5.2.2 关键代码的编写与解释
以下是使用Matlab实现BFGS算法的关键步骤和代码,我们将逐步解析其构成。
5.2.2.1 初始化
首先,我们需要定义一个初始点和初始的近似Hessian矩阵。对于二次函数问题,初始点可以任意选择,而初始近似Hessian矩阵通常选择为单位矩阵。
% 初始化
x = [0.5; 0.5]; % 初始点
H = eye(2); % 初始近似Hessian矩阵为单位矩阵
5.2.2.2 迭代过程
BFGS算法的每次迭代包括以下步骤:
- 计算当前点的梯度
- 确定搜索方向
- 执行线搜索以确定步长
- 更新当前点
- 更新近似Hessian矩阵
下面是一段示例代码:
% 设定迭代次数上限
max_iter = 100;
% 设定容忍度,当梯度的2-范数小于这个值时停止迭代
tol = 1e-6;
for iter = 1:max_iter
% 计算当前点的梯度
g = gradient_function(x);
% 检查梯度是否足够小,以判断是否收敛
if norm(g) < tol
disp('算法收敛');
break;
end
% 计算搜索方向(H*g)
p = -H * g;
% 线搜索过程,这里简化为固定的步长因子,实际情况需要更复杂的步长确定策略
alpha = 1;
% 更新点
s = alpha * p;
x_new = x + s;
% 计算新点的梯度
g_new = gradient_function(x_new);
% 计算y和s
y = g_new - g;
s = x_new - x;
% 更新近似Hessian矩阵
rho = 1 / (y' * s);
I = eye(2);
H = (I - rho * s * y') * H * (I - rho * y * s') + rho * s * s';
% 更新当前点
x = x_new;
end
% 用于计算梯度的函数定义
function g = gradient_function(x)
g = [2*x(1); 2*x(2)]; % 这里是二次函数的梯度
end
上述代码中,我们定义了一个二次函数的梯度函数,并初始化了迭代过程。在每次迭代中,我们计算当前点的梯度、搜索方向、新的点,以及最后更新近似Hessian矩阵。
需要注意的是,在实际应用中,线搜索步骤通常需要更复杂的策略,例如回溯线搜索或Wolfe条件,以保证算法的稳定性和效率。
5.2.2.3 结果展示
最终,算法会输出最小化过程中的点序列、计算的梯度值,以及每次迭代中更新的近似Hessian矩阵,这些信息可以帮助我们理解算法的执行过程和收敛行为。通过分析这些数据,可以对算法进行调优,以达到更好的优化性能。
6. BFGS算法的挑战和解决方案
6.1 算法应用中遇到的常见问题
6.1.1 数值稳定性和计算效率问题
在实际应用BFGS算法时,一个经常遇到的问题是数值稳定性。由于在每次迭代中都需要更新Hessian矩阵的逆矩阵,数值误差可能会累积,从而影响算法的稳定性。为了解决这个问题,研究者提出了多种策略,如限制近似Hessian矩阵的更新步骤的大小,或是在更新矩阵之前进行尺度化处理。
另一个关键问题是如何提高算法的计算效率。BFGS算法的每次迭代需要进行多次矩阵运算,计算复杂度较高。特别是在处理大规模优化问题时,这一点变得尤为重要。为了提升效率,可以考虑使用稀疏矩阵技术,或者结合多线程和并行计算以分散计算负载。
6.1.2 大规模问题的优化策略
面对大规模的优化问题,直接应用BFGS算法可能会遇到内存使用过高和计算时间过长的问题。一个有效的解决方案是引入所谓的"有限内存BFGS"(L-BFGS)算法,它通过只存储最近几步的更新信息,显著减少了内存的使用,同时仍保持良好的优化性能。
对于超大规模的问题,还可能采用分布式优化框架,将优化问题分解为多个子问题,在不同的计算节点上并行求解,然后再通过某种形式的信息汇总和更新,得到全局最优解。
6.2 BFGS算法的改进和扩展
6.2.1 算法变种的介绍
为了更好地适应各种不同的优化问题,研究者们提出了许多BFGS算法的变种。例如,有使用梯度差分代替二阶导数信息的拟牛顿方法,这类算法在处理非光滑问题时显示出更好的性能。此外,还有针对特定类型问题设计的变体,如用于结构化非线性最小二乘问题的Dogleg算法和Levenberg-Marquardt算法。
另外,为了改善收敛速度和避免局部最优解,有时会在BFGS算法中引入线搜索方法和信任区域策略,这些改进使得算法能够在更广的范围内寻找全局最优解。
6.2.2 针对特定问题的优化方法
对于一些特定的问题,标准的BFGS算法可能需要特别的调整。比如,在机器学习领域中,针对带有L1正则项的优化问题,可以使用L1-BFGS算法,它能够在保证参数稀疏性的同时加速优化过程。对于高维数据问题,需要使用特定的预处理技术来改善条件数和加快收敛速度。
在实际应用中,我们可能还需要结合领域知识和启发式算法,比如在金融工程中可能结合蒙特卡洛模拟,在结构工程中可能结合有限元分析,从而得到更适合问题特点的优化方案。
在下一章节,我们将通过一个详细的例子,展示如何在Matlab环境中实现BFGS算法,并针对具体问题进行优化。这将为我们提供一个实践BFGS算法的完整视角。
简介:BFGS算法是一种广泛应用于优化问题的拟牛顿方法,特别适合解决无约束问题。它通过构建近似的Hessian矩阵来加速梯度下降过程,比传统方法更快收敛。在MATLAB中,BFGS算法通过 fminunc 函数提供,该函数利用BFGS算法作为其求解器之一。算法的核心在于更新近似Hessian矩阵,这一过程依赖于迭代中的关键信息,如搜索方向、步长、梯度变化等。此外, basis2wy 函数可能在实现BFGS算法中扮演重要角色,通过WY表示法简化计算。该算法在实际应用中可能面临的挑战可通过MATLAB的参数和选项进行管理,从而确保快速且稳定的优化过程。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐

 5
5 0
0- 0



 已为社区贡献23条内容
已为社区贡献23条内容

所有评论(0)