ubuntu1804发布kitti数据集的gps资料,imu资料(包含发布图片,点云过程)
这是一套完整的学习过程,从发布图片,点云到发布gps,imu,并实现他们的可视化具体的学习链接如下,是对学习的记录,方便自己回顾,同时也希望帮到需要帮助的人。系列1:Ubuntu1804里进行KITTI数据集可视化操作_FYY2LHH的博客-CSDN博客系列2:自己编写程序publish出kitti数据集,可视化kitti数据集_FYY2LHH的博客-CSDN博客系列3:ubuntu1804自己编
这是一套完整的学习过程,从发布图片,点云到发布gps,imu,并实现他们的可视化
具体的学习链接如下,是对学习的记录,方便自己回顾,同时也希望帮到需要帮助的人。
系列1:Ubuntu1804里进行KITTI数据集可视化操作_FYY2LHH的博客-CSDN博客
系列2:自己编写程序publish出kitti数据集,可视化kitti数据集_FYY2LHH的博客-CSDN博客
系列3:ubuntu1804自己编写程序发布kitti数据集的点云数据_FYY2LHH的博客-CSDN博客
系列4:在rviz中利用KITTI数据集画出自己的车子以及照相机的视野_FYY2LHH的博客-CSDN博客
本章节记录内容为发布imu并实现可视化,发布gps,并查看话题发布类型
1、仍然是三个py文件,第一个publish
#!/usr/bin/env python
import rospy
from std_msgs.msg import Header
from visualization_msgs.msg import Marker,MarkerArray
from sensor_msgs.msg import Image, PointCloud2, Imu, NavSatFix
from geometry_msgs.msg import Point
import sensor_msgs.point_cloud2 as pcl2
from cv_bridge import CvBridge
import tf
import numpy as np
FRAME_ID = 'map'
def publish_camera(cam_pub, bridge, image):
cam_pub.publish(bridge.cv2_to_imgmsg(image,"bgr8"))
def publish_point_cloud(pcl_pub,point_cloud):
header = Header()
header.stamp = rospy.Time.now()
header.frame_id = FRAME_ID
pcl_pub.publish(pcl2.create_cloud_xyz32(header, point_cloud[:,:3]))
def publish_ego_car(ego_car_pub):
# publish left and right 45 degree FOV lines and ego car model mesh
marker_array = MarkerArray()
marker = Marker()
marker.header.frame_id = FRAME_ID
marker.header.stamp = rospy.Time.now()
marker.id = 0
marker.action = Marker.ADD
marker.lifetime = rospy.Duration()
marker.type = Marker.LINE_STRIP
# line
marker.color.r = 0.0
marker.color.g = 1.0
marker.color.b = 0.0
marker.color.a = 1.0
marker.scale.x = 0.2 # line width
marker.points = []
# check the kitti axis model
marker.points.append(Point(5,-5,0)) # left up
marker.points.append(Point(0,0,0)) # center
marker.points.append(Point(5, 5,0)) # right up
marker_array.markers.append(marker111)
ego_car_pub.publish(marker)
def publish_car_model(model_pub):
mesh_marker = Marker()
mesh_marker.header.frame_id = FRAME_ID
mesh_marker.header.stamp = rospy.Time.now()
mesh_marker.id = -1
mesh_marker.lifetime = rospy.Duration()
mesh_marker.type = Marker.MESH_RESOURCE
mesh_marker.mesh_resource = "/root/catkin_ws/src/kitti_tutorial/AudiR8.dae" #LOAD ERROR, DON'T KNOW WHY
mesh_marker.pose.position.x = 0.0
mesh_marker.pose.position.y = 0.0
mesh_marker.pose.position.z = -1.73
q = tf.transformations.quaternion_from_euler(np.pi/2,0,np.pi)
mesh_marker.pose.orientation.x = q[0]
mesh_marker.pose.orientation.y = q[1]
mesh_marker.pose.orientation.z = q[2]
mesh_marker.pose.orientation.w = q[3]
mesh_marker.color.r = 1.0
mesh_marker.color.g = 1.0
mesh_marker.color.b = 1.0
mesh_marker.color.a = 1.0
mesh_marker.scale.x = 0.9
mesh_marker.scale.y = 0.9
mesh_marker.scale.z = 0.9
model_pub.publish(mesh_marker)
def publish_imu(imu_pub, imu_data, log=False):
"""
Publish IMU data
http://docs.ros.org/melodic/api/sensor_msgs/html/msg/Imu.html
"""
imu = Imu()
imu.header.frame_id = FRAME_ID
imu.header.stamp = rospy.Time.now()
q = tf.transformations.quaternion_from_euler(float(imu_data.roll), float(imu_data.pitch), \
float(imu_data.yaw)) # prevent the data from being overwritten
imu.orientation.x = q[0]
imu.orientation.y = q[1]
imu.orientation.z = q[2]
imu.orientation.w = q[3]
imu.linear_acceleration.x = imu_data.af
imu.linear_acceleration.y = imu_data.al
imu.linear_acceleration.z = imu_data.au
imu.angular_velocity.x = imu_data.wf
imu.angular_velocity.y = imu_data.wl
imu.angular_velocity.z = imu_data.wu
imu_pub.publish(imu)
if log:
rospy.loginfo("imu msg published")
def publish_gps(gps_pub, gps_data, log=False):
"""
Publish GPS data
"""
gps = NavSatFix()
gps.header.frame_id = FRAME_ID
gps.header.stamp = rospy.Time.now()
gps.latitude = gps_data.lat
gps.longitude = gps_data.lon
gps.altitude = gps_data.alt
gps_pub.publish(gps)
if log:
rospy.loginfo("gps msg published")2、data_utils.py
#!/usr/bin/env python
import cv2
import numpy as np
import pandas as pd
IMU_COLUMN_NAMES = ['lat', 'lon', 'alt', 'roll', 'pitch', 'yaw', 'vn', 've', 'vf', 'vl', 'vu', 'ax', 'ay', 'az', 'af','al', 'au', 'wx', 'wy', 'wz', 'wf', 'wl', 'wu', 'posacc', 'velacc', 'navstat', 'numsats', 'posmode','velmode', 'orimode']
def read_camera(path):
return cv2.imread(path)
def read_point_cloud(path):
return np.fromfile(path,dtype=np.float32).reshape(-1, 4)
def read_imu(path):
df = pd.read_csv(path, header=None, sep=' ')
df.columns = IMU_COLUMN_NAMES
return df3、kitti.py
#!/usr/bin/env python
from data_utils import *
from publish_utils import *
import os
DATA_PATH = '/home/ros/dianyun/2011_09_26_drive_0005_sync/2011_09_26/2011_09_26_drive_0005_sync/'
if __name__ == "__main__":
frame = 0
rospy.init_node('kitti_node',anonymous=True)
cam_pub = rospy.Publisher('kitti_cam', Image, queue_size=10)
pcl_pub = rospy.Publisher('kitti_point_cloud', PointCloud2, queue_size=10)
bridge = CvBridge()
ego_pub = rospy.Publisher('kitti_ego_car',Marker, queue_size=10)
# model_car_pub = rospy.Publisher('kitti_model_car',Marker, queue_size=10)
imu_pub = rospy.Publisher('kitti_imu',Imu, queue_size=10)
gps_pub = rospy.Publisher('kitti_gps',NavSatFix, queue_size=10)
rate = rospy.Rate(10)
while not rospy.is_shutdown():
image = read_camera(os.path.join(DATA_PATH, 'image_02/data/%010d.png'%frame))
point_cloud = read_point_cloud(os.path.join(DATA_PATH, 'velodyne_points/data/%010d.bin'%frame))
imu_data = read_imu(os.path.join(DATA_PATH,'oxts/data/%010d.txt'%frame))
publish_camera(cam_pub, bridge, image)
publish_point_cloud(pcl_pub, point_cloud)
publish_ego_car(ego_pub)
# publish_car_model(model_car_pub)
publish_imu(imu_pub, imu_data )
publish_gps(gps_pub, imu_data ) #gps rviz cannot visulize, only use rostopic echo
rospy.loginfo("kitti published")
rate.sleep()
frame += 1
frame %= 154三个文件的路径还是原来的的路径
4、在rviz中添加imu的话题
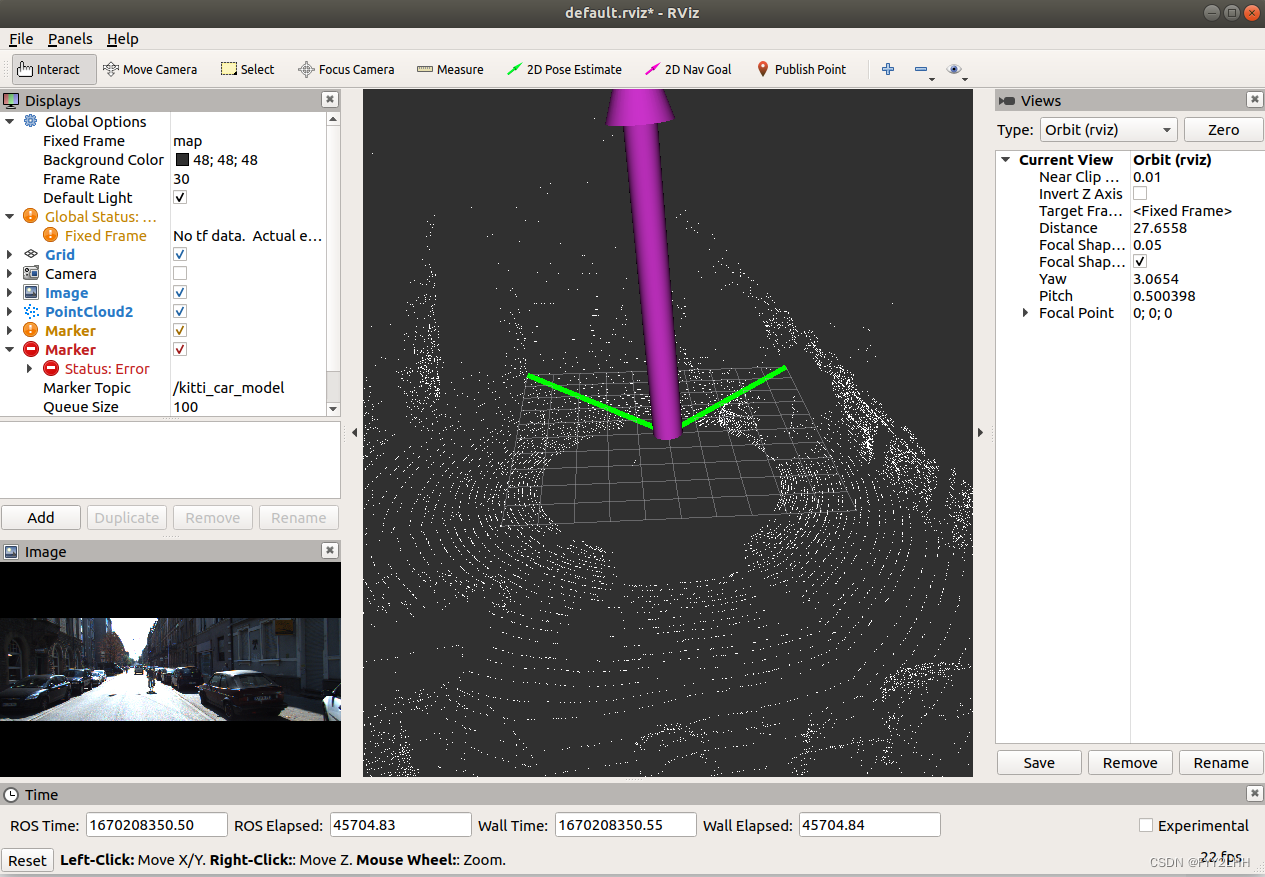
紫色的长度代表速度,偏向代表方向
5、查看gps的话题
新开一个终端
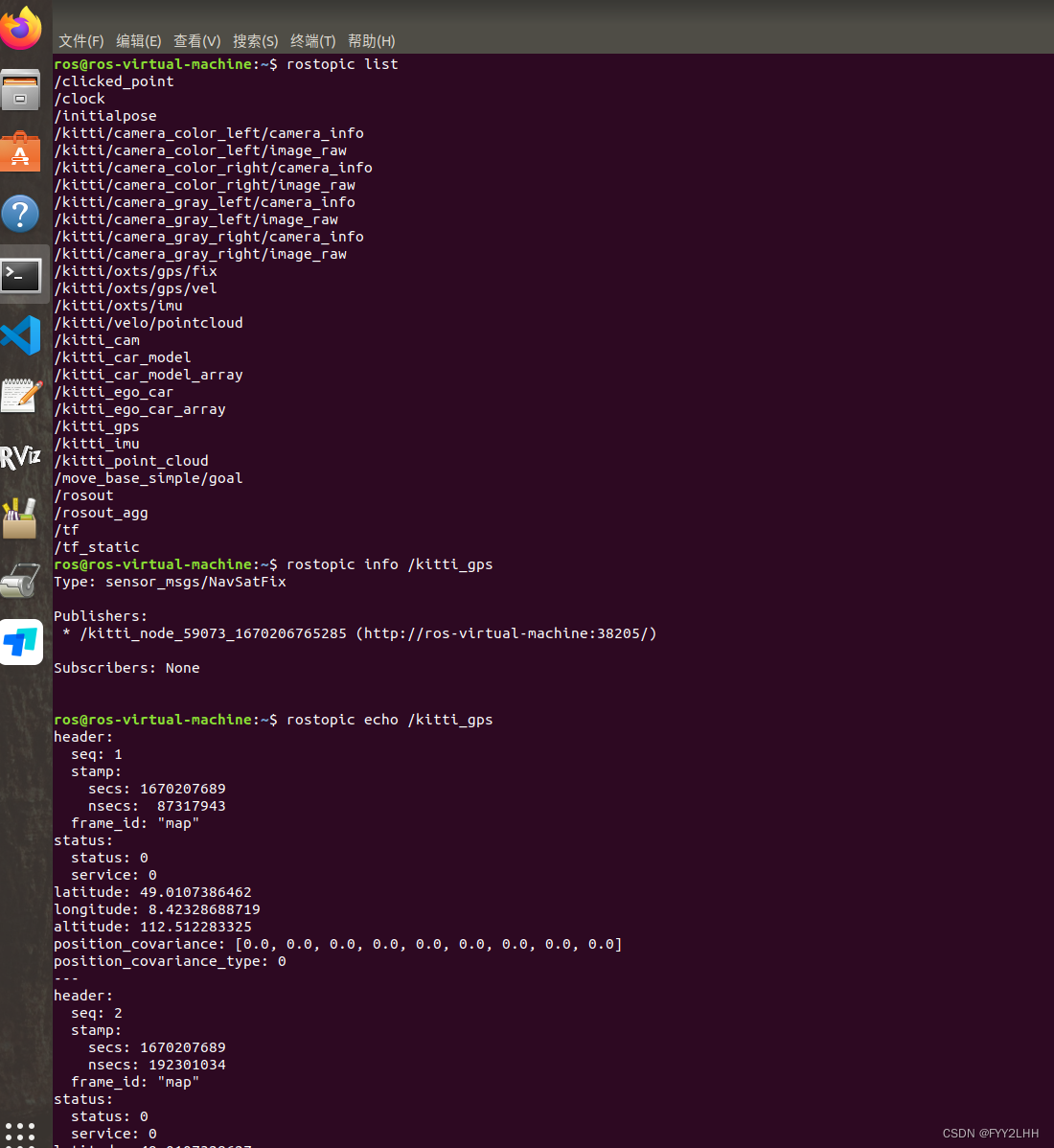
第一行rostopic list查看发布哪些话题
第二行rostopic info /kitti_gps查看gps的话题类型
第三行rostopic echo /kitti_gps查看gps发布的具体话题的详细细信息

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 2
2 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)