Ubuntu16.04 ROS 深度学习_深度学习/目标检测之ROS——创建publisher
今天从古月居那儿学习了如何创建一个publisher。一、创建一个功能包在工作空间的src中打开终端,输入catkin_create_pkg来创建功能包二、创建发布者代码在功能包的src中创建文件——velocity_publisher.cpp。文件内容如下。然后在CMakeLists中修改相关地方,格式可参考注释。三、编译回到工作空间中,通过catkin_make编译代码。编译完成就代表新建立的
今天从古月居那儿学习了如何创建一个publisher。
一、创建一个功能包
在工作空间的src中打开终端,输入catkin_create_pkg来创建功能包
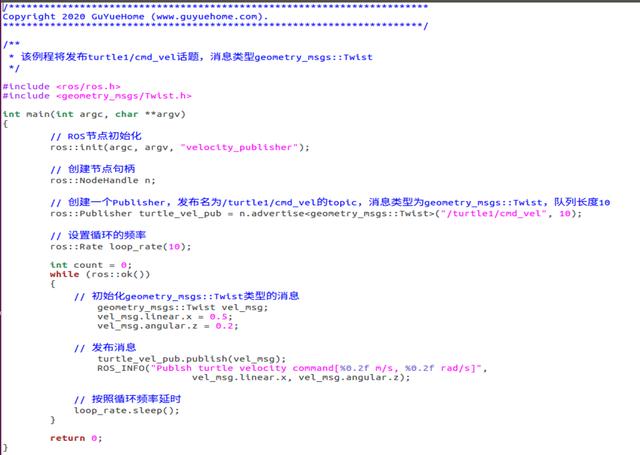
二、创建发布者代码
在功能包的src中创建文件——velocity_publisher.cpp。文件内容如下。
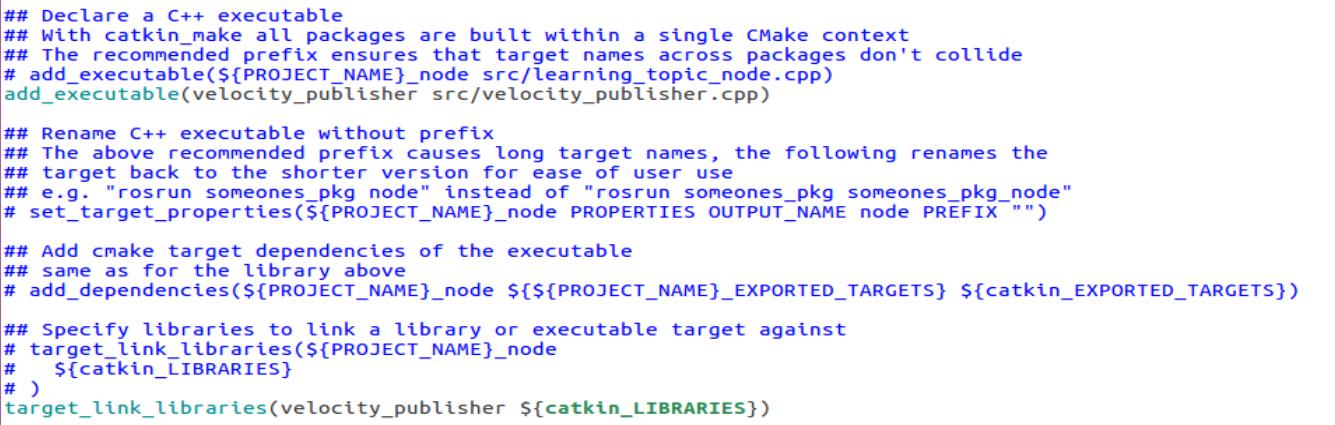
然后在CMakeLists中修改相关地方,格式可参考注释。
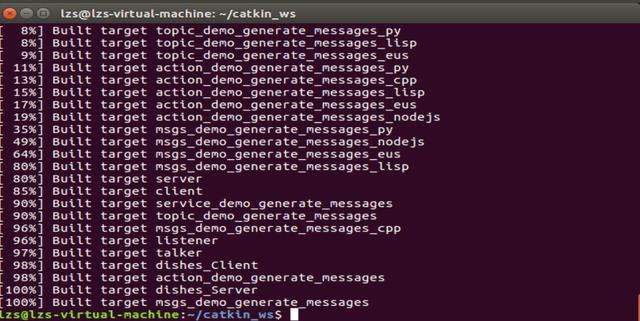
三、编译
回到工作空间中,通过catkin_make编译代码。编译完成就代表新建立的节点生效了。
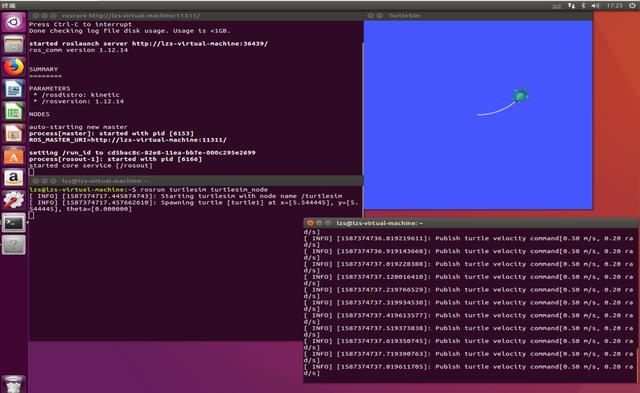
四、测试
打开三个终端,分别输入roscore,rosrun turtlesim turtlesim_node,rosrun learning_topic velocity_publisher。
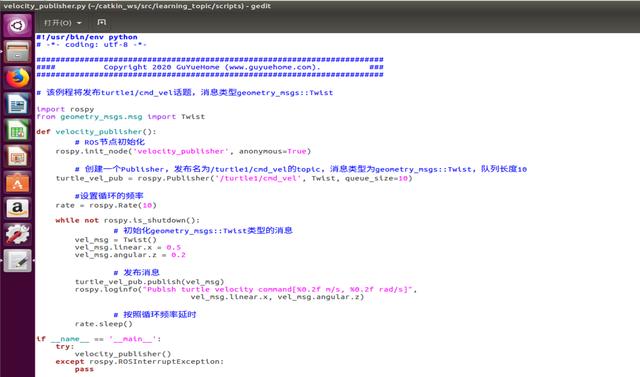
五、用python实现
功能包内创建scripts文件夹用来存放python脚本,创建velocity_publisher.cpp的文件,里面的代码如下:
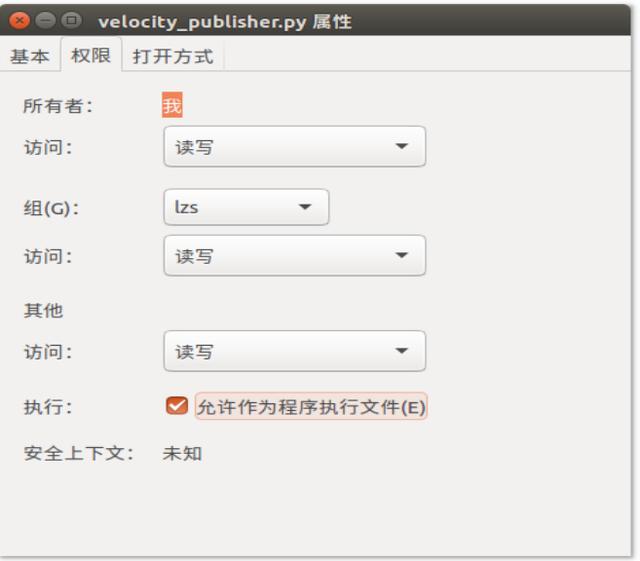
注意!!!打开文件的属性,勾选作为程序执行文件,然后编译

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 0
0 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)