嵌入式linux测试gpio口,嵌入式Linux学习笔记之GPIO接口
一、GPIO介绍GPIO意为通用输入输出端口,简单说就是一些引脚,通过它们输出高低电平或者通过它们读取引脚高低电平状态S3C2440有130个I/O端口,分为A-J共9组:GPA、GPB、、、、GPJ,可以通过设置寄存器来确定某个引脚用于输入、输出还是特殊功能。比如:可以设置GPH6作为输入、输出、或者用于串口。1、通过寄存器来操作GPIO引脚1)GPxCON寄存器它用于配置引脚的功能端口A与端口
一、GPIO介绍
GPIO意为通用输入输出端口,简单说就是一些引脚,通过它们输出高低电平或者通过它们读取引脚高低电平状态
S3C2440有130个I/O端口,分为A-J共9组:GPA、GPB、、、、GPJ,可以通过设置寄存器来确定某个引脚用于输入、输出还是特殊功能。
比如:可以设置GPH6作为输入、输出、或者用于串口。
1、通过寄存器来操作GPIO引脚
1)GPxCON寄存器
它用于配置引脚的功能
端口A与端口B-J在功能上有所不同,GPACON中每一位对应一根引脚(共23根引脚)
当某位为0时,对应引脚为输出,此时在GPADAT中相应位写入0或1,让此引脚输出低电平或高电平;当某位被设为1时,对应引脚为地址线或用于地址控制,此时GPADAT保留不用。
GPACON通常被设为全1,以便访问外部存储设备
端口B-J在寄存器操作上完全相同,GPxCon中每两位控制一根引脚,00表示输入,01表示输出,10表示特殊功能,11保留不用
2)GPxDAT寄存器
它用于读写引脚,当引脚被设为输入时,读此寄存器得到对应引脚的电平状态是高还是低;当引脚被设为输出时,写此寄存器相应位可令此引脚输出高低电平。
3)GPxUP寄存器
GPxUP,某位为1时,相应引脚无内部上拉电阻;为1时,相应引脚使用内部上拉电阻
上拉电阻、下拉电阻的作用在于,当GPIO引脚出于第三态(非高低电平,而是高阻态,即相当于没接芯片)时,它的电平状态由上拉电阻和下拉电阻确定。
2、使用软件来访问硬件
当个引脚的操作有3种:输出高低电平、检测引脚状态、中断。对某个引脚的操作一般通过读写寄存器实现
首先我们从点亮LED开始,下图选自mini2440原理图,LED1-4分别对应GPB5-8
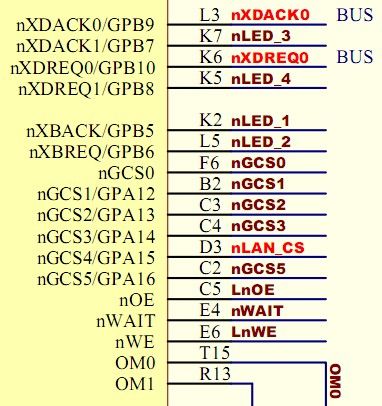
如果要控制这些LED,那么我们首先要把GPBCON寄存器中GPB5-8对应的位设为输出功能,然后写GPBDAT寄存器的相应位,使这4个引脚输出高低电平
一般是低电平有效,即高电平时,对应LED熄灭,低电平时,对应LED点亮
访问寄存器的时候,通过S3C2440的数据手册查到GPBCON和GPBDAT寄存器的地址,附数据手册 点击下载
GPBCON为0x56000010,GPBDAT为0x56000014
通过下面的代码让GPB5输出低电平,点亮LED1
#define GPBCON (*(volatile unsigned long *) 0x56000010) //volatile修饰符确保每次去内存中读取变量的值,还不是从cache或者寄存器中
#define GPBDAT (*(volatile unsigned long *) 0x56000014)
#define GPB5_OUT (1<
GPBCON = GPB5_OUT;
GPBDAT &= ~(1<<5); //1左移5位取反,那么第5位为0,即GPB5输出低电平,点亮LED1
二、GPIO操作实例
1、使用汇编代码点亮一个LED
先看源程序 led_on.S
.text
.global _start
_start:
LDR R0,=0x56000010@ R0设为GPBCON寄存器
MOV R1,#0x00000400@ 设置GPB5为输出口, 位[11:10]=0b01
STR R1,[R0]
LDR R0,=0x56000014@ R0设为GPBDAT寄存器
MOV R1,#0x00000000@ 此值改为0x00000020,可让LED1熄灭
STR R1,[R0]@ GPB5输出0,LED1点亮
MAIN_LOOP:
B MAIN_LOOP @无限循环
再来看程序的Makefile
led_on.bin : led_on.S
arm-linux-gcc -g -c -o led_on.o led_on.S
arm-linux-ld -Ttext 0x0000000 -g led_on.o -o led_on_elf
arm-linux-objcopy -O binary -S led_on_elf led_on.bin
clean:
rm -f led_on.bin led_on_elf *.o
led_on.S生成led_on.bin
第一行做汇编
第二行做连接,指定代码段起始地址为0x00000000
第三行把ELF格式转为二进制格式
clean用于清除编译生成的文件
2、使用c语言代码点亮LED
汇编可读性比C差,我们用C来实现
@******************************************************************************
@ File:crt0.S
@ 功能:通过它转入C程序
@******************************************************************************
.text
.global _start
_start:
ldr r0, =0x53000000
@ WATCHDOG寄存器地址
mov r1, #0x0
str r1, [r0]
@ 写入0,禁止WATCHDOG,否则CPU会不断重启
ldr sp, =1024*4
@ 设置堆栈,注意:不能大于4k, 因为现在可用的内存只有4K,这4k是steppingstone,后面会介绍
@ nand flash中的代码在复位后会移到内部ram中,此ram只有4K
bl main
@ 调用C程序中的main函数
halt_loop:
b halt_loop
下面是led_on_c.c
#define GPBCON (*(volatile unsigned long *)0x56000010)
#define GPBDAT (*(volatile unsigned long *)0x56000014)
int main()
{
GPBCON = 0x00000400;
// 设置GPB5为输出口, 位[11:10]=0b01
GPBDAT = 0x00000000;
// GPB5输出0,LED1点亮
return 0;
}
最后是Makefile
led_on_c.bin : crt0.S led_on_c.c
arm-linux-gcc -g -c -o crt0.o crt0.S
arm-linux-gcc -g -c -o led_on_c.o led_on_c.c
arm-linux-ld -Ttext 0x0000000 -g crt0.o led_on_c.o -o led_on_c_elf
arm-linux-objcopy -O binary -S led_on_c_elf led_on_c.bin
arm-linux-objdump -D -m arm led_on_c_elf > led_on_c.dis
clean:
rm -f led_on_c.dis led_on_c.bin led_on_c_elf *.o
分别汇编crt0.S和led_on_c.c
连接目标到led_on_c_elf,代码段起始地址位0x00000000
转换ELF格式到二进制led_on_c.bin
最后转换结果为汇编码方便查看
3、测试程序
在先前搭建的编译环境中进入代码目录
#make
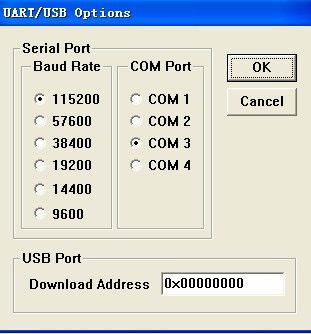
得到的bin文件,在win中使用dnw下载到开发板,设置串口波特率,对应端口,8N1,下载地址0x00000000
开关拨到nor flash,打开电源,出现菜单以后,选择a
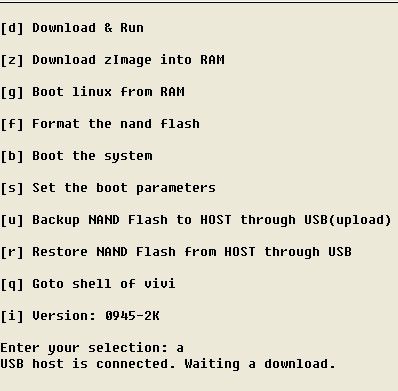
然后选择USB PORT-transmit/restore,选择编译好的bin文件
然后开关拨到nand启动,效果如下:(设置LED1和LED4亮)

4、使用按键来控制LED
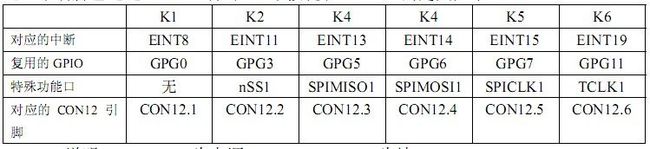
K1-K6如上图对应GPG,我们使用K1-K4操作LED1-LED4
@******************************************************************************
@ File:crt0.S
@ 功能:通过它转入C程序
@******************************************************************************
.text
.global _start
_start:
ldr r0, =0x56000010
@ WATCHDOG寄存器地址
mov r1, #0x0
str r1, [r0]
@ 写入0,禁止WATCHDOG,否则CPU会不断重启
ldr sp, =1024*4
@ 设置堆栈,注意:不能大于4k, 因为现在可用的内存只有4K,这4k是steppingstone,后面会介绍
@ nand flash中的代码在复位后会移到内部ram中,此ram只有4K
bl main
@ 调用C程序中的main函数
halt_loop:
b halt_loop
下面是key_led.c文件
#define GPBCON (*(volatile unsigned long *)0x56000010)
#define GPBDAT (*(volatile unsigned long *)0x56000014)
#define GPGCON (*(volatile unsigned long *)0x56000060)
#define GPGDAT (*(volatile unsigned long *)0x56000064)
/*
* LED1-4对应GPB5、GPB6、GPB7、GPB8
*/
#define GPB5_out (1<
#define GPB6_out (1<
#define GPB7_out (1<
#define GPB8_out (1<
/*
* K1-K4对应GPG0、GPG3、GPG5、GPG6
*/
#define GPG7_in ~(3<
#define GPG6_in ~(3<
#define GPG3_in ~(3<
#define GPG0_in ~(3<
int main()
{
unsigned long dwDat;
// LED1-LED4对应的4根引脚设为输出
GPBCON = GPB5_out | GPB6_out | GPB7_out | GPB8_out ;
// K1-K4对应的2根引脚设为输入
GPGCON = GPG0_in & GPG3_in & GPG6_in & GPG7_in ;
while(1){
//若Kn为0(表示按下),则令LEDn为0(表示点亮)
dwDat = GPGDAT;
// 读取GPG管脚电平状态
if (dwDat & (1<<0))
// K1没有按下
GPBDAT |= (1<<5);
// LED1熄灭
else
GPBDAT &= ~(1<<5);
// LED1点亮
if (dwDat & (1<<3))
// K2没有按下
GPBDAT |= (1<<6);
// LED2熄灭
else
GPBDAT &= ~(1<<6);
// LED2点亮
if (dwDat & (1<<5))
// K3没有按下
GPBDAT |= (1<<7);
// LED3熄灭
else
GPBDAT &= ~(1<<7);
// LED3点亮
if (dwDat & (1<<6))
// K4没有按下
GPBDAT |= (1<<8);
// LED4熄灭
else
GPBDAT &= ~(1<<8);
// LED4点亮
}
return 0;
}
最后是Makefile
key_led.bin : crt0.S key_led.c
arm-linux-gcc -g -c -o crt0.o crt0.S
arm-linux-gcc -g -c -o key_led.o key_led.c
arm-linux-ld -Ttext 0x0000000 -g crt0.o key_led.o -o key_led_elf
arm-linux-objcopy -O binary -S key_led_elf key_led.bin
arm-linux-objdump -D -m arm key_led_elf > key_led.dis
clean:
rm -f key_led.dis key_led.bin key_led_elf *.o
测试效果



魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 0
0 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)