目录
前言
课题背景和意义
实现技术思路
一、自动驾驶简述
二、面向自动驾驶的目标检测
三、应用挑战与发展方向
实现效果图样例
最后
前言
📅大四是整个大学期间最忙碌的时光,一边要忙着备考或实习为毕业后面临的就业升学做准备,一边要为毕业设计耗费大量精力。近几年各个学校要求的毕设项目越来越难,有不少课题是研究生级别难度的,对本科同学来说是充满挑战。为帮助大家顺利通过和节省时间与精力投入到更重要的就业和考试中去,学长分享优质的选题经验和毕设项目与技术思路。
🚀对毕设有任何疑问都可以问学长哦!
选题指导: https://blog.csdn.net/qq_37340229/article/details/128243277
大家好,这里是海浪学长毕设专题,本次分享的课题是
🎯基于机器自动驾驶目标检测研究-YOLO
课题背景和意义
交通是一个国家经济发展的重要基础产业。随着人们生活水平的提高,汽车已经成为人们日常出行的重要交通工具。据公安部统计,2021 年我国汽车保有量达3.02 亿辆 。但汽车提供方便的同时,全国的交通事故数量居高不下,据估计,90% 的车祸是由人为失误造成的。传统汽车驾驶需要驾驶者高度集中注意力,时刻注意周围环境的变换,然而疲劳、噪音、天气、心理等多方面因素都会影响驾驶者的判断,进而可能产生危险。作为未来汽车的发展方向,自动驾驶汽车拥有自主判断能力,能较大程度地减少人为失误。同时,自动驾驶汽车能更好地节能减排、减少污染,有良好的应用前景。为使自动驾驶汽车能够安全稳定地运行在道路上,对于参与道路交通的各类目标,如:车辆、行人、交通标志、灯光、车道线等,自动驾驶车辆都需要做出实时精确的检测以及判断。对实时目标的精准检测、识别并做出判断是保证其运行的基础与核心。 自动驾驶是人工智能发展领域的一个重要方向,拥有良好的发展前景,而实时准确的目标检测与识别是保证自动驾驶汽车安全稳定运行的基础与关键。
实现技术思路
一、自动驾驶简述
自动驾驶汽车中的自动驾驶系统是多技术融合的产物。所谓自动驾驶即通过多种车载传感器(如摄像头、激光雷达、毫米波雷达、GPS、惯性传感器等)来识别车辆所处的周边环境和状态,并根据所获得的环境信息(包括道路信息、交通信息、车辆位置和障碍物信息等)自主做出分析和判断,从而自主地控制车辆运动,最终实现自动驾驶。
二、面向自动驾驶的目标检测
评价指标
在介绍目标检测的算法之前,需要了解在目标检测中常用的评价指标。在判断分类的精度一般使用准确度(accuracy)、精确度( precision )、召回率( recall rate )、 AP( average precision )、 mAP ( mean average precision ) 等,在判断定位的精度一般使用交并比(intersection over union, IoU ),在判断运行的速度时一般采用 FPS(frames per second )。
(1)准确度是指所有预测中预测正确的比例。
(2)精确率是指在所有检测出的目标中检测正确的概率。

(3)召回率是指所有的正样本中正确识别的概率。
(4)AP由 P-R曲线和坐标围起来的面积组成,用于表示不同召回率下检测的平均正确性。mAP为各类别AP 的平均值,用于对所有目标类别检测的效果取平均值。性能越好,比值越高。
(5) IoU 表示的是“预测的边框”和原图片标注的“真实边框”的交叠率,是两者交集与并集的比值。比值达到1 时预测的效果达到最佳。
(6) FPS 是目标检测的速度性能评价指标,检测速度代表目标检测算法与模型的计算性能。FPS 即每秒处理图片的帧数,数值越大代表检测速度越快。
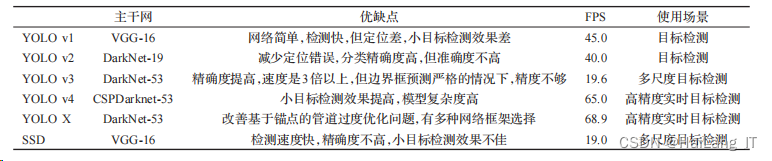
目标检测算法
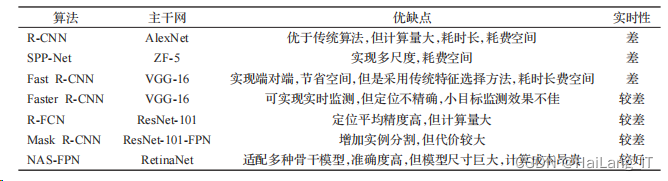
目标检测与识别是自动驾驶的感知系统的重要组成部分,在目标检测领域近 10 年具有代表性的算法如图所示。
 基于深度学习的目标检测算法包含有 Two-Stage目标检测算法和One-Stage 目标检测算法两类。
基于深度学习的目标检测算法包含有 Two-Stage目标检测算法和One-Stage 目标检测算法两类。
在深度学习的 Two-Stage 目标检测的经典主流算法主要有 R-CNN 、 SPP-Net 、 Fast R-CNN 、 FasterR-CNN、R-FCN以及 NAS-FPN等。2014 年提出的 R-CNN 算法是第一个工业级精 度的 Two-Stage 目标检测算法,后期基于分类的 Two-Stage 算法虽然在检测效果上有了很大提升,但是在算法的速度上,还是不能满足目标检测任务对于实时性的要求。
YOLO 系列算法满足了目标检测的实时性,但在检测精度上却做出了一定的牺牲,尤其是 YOLO v1 对于分布密集的小物体,更是极易出现漏检的情况。
YOLO算法在自动驾驶的应用
随着自动驾驶车辆和深度学习目标检测不断的研究,学者们将改进后的YOLO 算法应用到自动驾驶车辆目标(车辆、行人、交通标志、灯光、车道线等)的实时监测中。
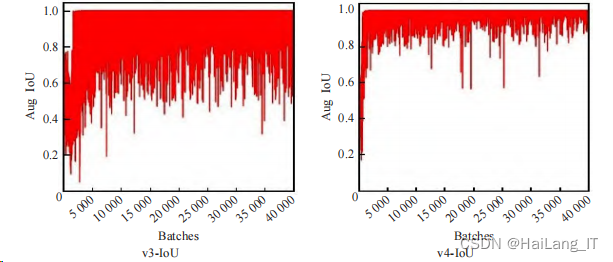
在交通安全中,交通标志识别的准确性在高级驾驶员辅助系统、自动驾驶车辆中发挥着关键作用通过添加新图像和变换图像扩展了中国交通标志数据集(CTSD),形成新的数据集 CCTSDB (CSUST Chinese traffic sign detection benchmark),并在YOLO v2算法网络的中间层采用多个1×1卷积层,在顶层减少卷积层,降低计算复杂度。同样选择CCTSDB数据集,分别使用YOLO v3和YOLO v4训练训练集。
交通车辆的检测
随着交通需求量的提升,道路交通压力也在不断的增加。不同的车辆类型都需要进行检测,包括机动车与非机动车。
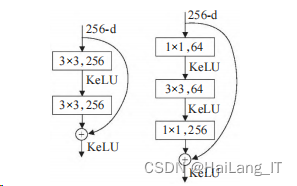
在 YOLO v3 框架下,设计特征融合结构和采用 GIOU 损失函数,降低非机动车漏检率,提高定位准确度。 将毫米波雷达与摄像机信息融合,利用时空同步关联多传感器数据,通过YOLO v2 算法实现深度融合对车辆的目标检测识别。原YOLO v2网络框架,添加改进的残差网络和 Kelu 激活函数来提高检测准确率,添加多尺度层来提升对图片中不同尺寸目标的检测精度。
行人的检测
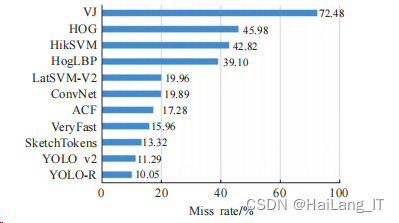
在交通中,行人同样是研究的重要部分。智能或无人驾驶车辆需要检测行人,识别他们的肢体运动,并了解他们行为的意义,然后再做出适当的响应决策。 在YOLO v2的网络结构中,将穿透层连接数从16 层改为 12 层,检测速度得到提升,同时由实验结果看降低了漏检率(Miss Rate )。
车道线的检测
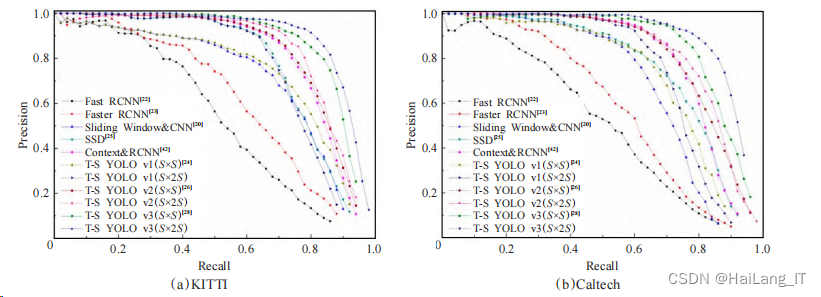
实现高效的车道检测是无人驾驶车辆道路环境感知模块的重要组成部分之一,车道线检测的准确性同样影响到无人驾驶车辆的安全性。构建一个基于 YOLO v3 的两阶段学习网络,对YOLO v3算法的结构参数进行了修改,采用基于 Canny 算子的自适应边缘检测算法对第一阶段模型检测到的车道进行重新定位,并将处理的图像作为标签数据用于第二阶段模型的训练,提高复杂场景下车道检测的准确性。下图显示了KITTI和Caltech数据集上的P-R(精确召回)曲线的结果。
三、应用挑战与发展方向
通过对基于 YOLO 算法的自动驾驶目标检测现状综述,了解到要拥有更精确和实时的检测效果,实现自动驾驶汽车的普遍推广应用,还面临众多挑战。
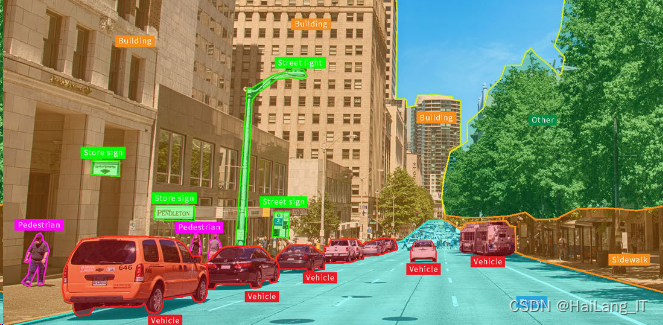
实现效果图样例
自动驾驶中的移动目标识别与跟踪:
我是海浪学长,创作不易,欢迎点赞、关注、收藏、留言。
毕设帮助,疑难解答,欢迎打扰!
最后




 3
3 0
0


 已为社区贡献397条内容
已为社区贡献397条内容

所有评论(0)