花一分钟带你读懂霍尔传感器产品的参数特性
霍尔传感器的特性与指标分为静态特性和动态特性。
一. 霍尔传感器的静态特性
静态特性表示被测量处于不变或缓慢情况下,输出与输入之间的关系。也就是当输入量为常量,或变化极慢时,这一关系被称作静态特性。
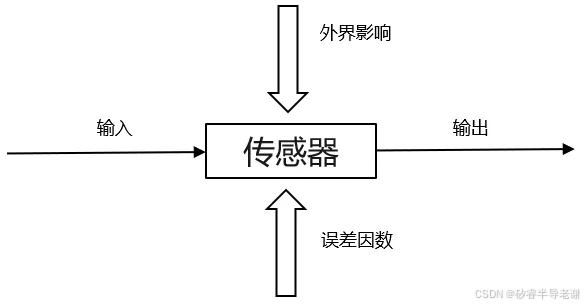
1、线性度:在规定条件下,霍尔传感器测量曲线(校准曲线)与拟合直线间最大偏差与满量程(Full Scale)输出值的百分比称为线性度。
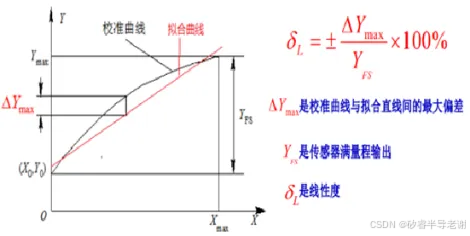
注:线性度与拟合直线为基准,拟合直线不同,线性度不同。
2、灵敏度:霍尔传感器的灵敏度是指到达稳定工作状态时,输出变化量与引起此变化的输入变化量之比。
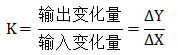
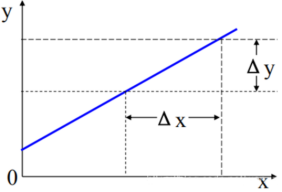
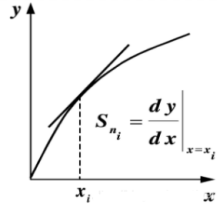
注:非线性传感器的灵敏度用dy/dx表示,其数值等于所对应的最小二乘法拟合直线的斜率。
3、分辨力:霍尔传感器在规定的测量范围内所能检测出的被测输入量的最小变化值。有些时候,也会用该值相对满量程的百分数表示,此时则称为分辨率。(满量程=最大量程-最小量程)
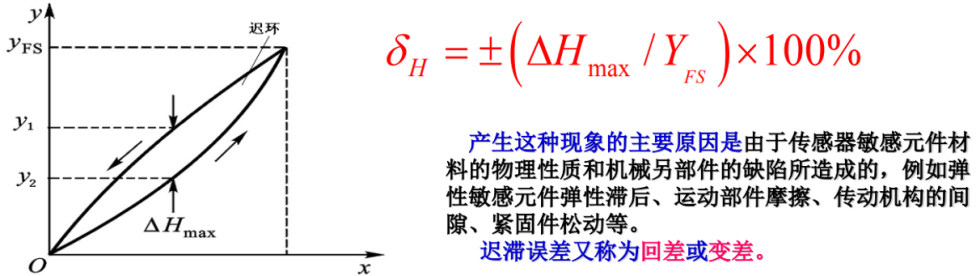
4、迟滞(回差):在相同工作条件和量程范围内,同一次测量中对应同一输入量的正行程和反行程其输出值间的最大偏差。
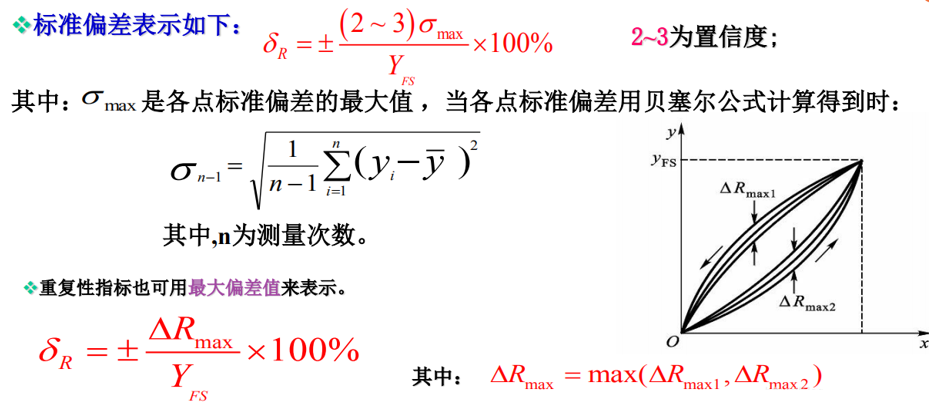
5、重复性:在同一工作条件下,输入量按同一方向在全测量范围内连续变动多次所得特性曲线的不一致性。数值上用各测量值正、反行程标准差的两倍或三倍与满量程的百分比。
注:迟滞和重复性的差异:
-
迟滞反映霍尔传感器机械结构和制造工艺上的缺陷,如摩擦、间隙、螺丝松动。元件腐蚀或碎裂及积尘等。
-
重复性反映测量结果偶然误差的大小,而不表示与真值之间的差别。有时重复性很好,但可能远离真值。
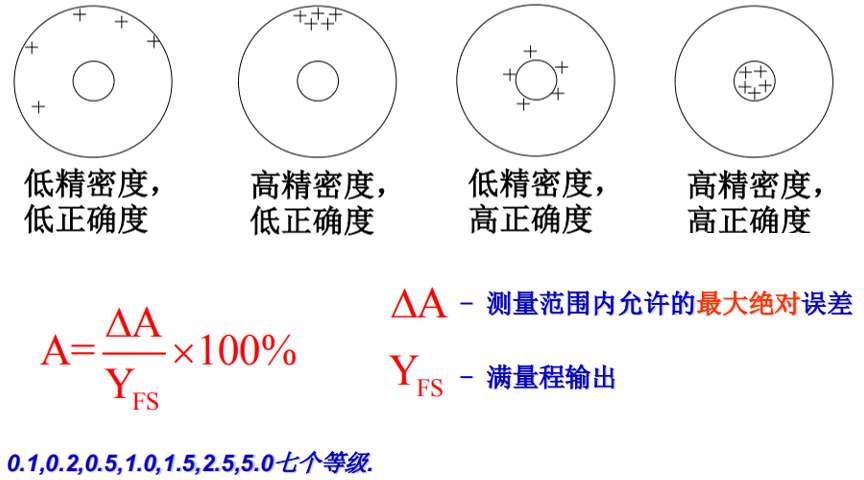
6、精度(静态准确度)
精度的指标:精密度、准确度、精确度
-
精密度:说明测量结果的分散性(随机误差)
-
准确度:说明测量结果偏离真值大小的程度(系统误差)
-
精确度:精密度和准确度的综合(极限误差)
工程中,为了表示测量结果的可靠程度,引入精确度等级概念,用A表示。
7、其他特性
-
阈值:从输出看能测出的输入量最小变化值,实际上是零位附近的灵敏度。
-
稳定性和温度稳定性:稳定性表示霍尔传感器在较长时间内保持其性能参数的能力,稳定性可用相对误差或绝对误差表示,表示方式如:XX个月不超过 %满量程输出。
-
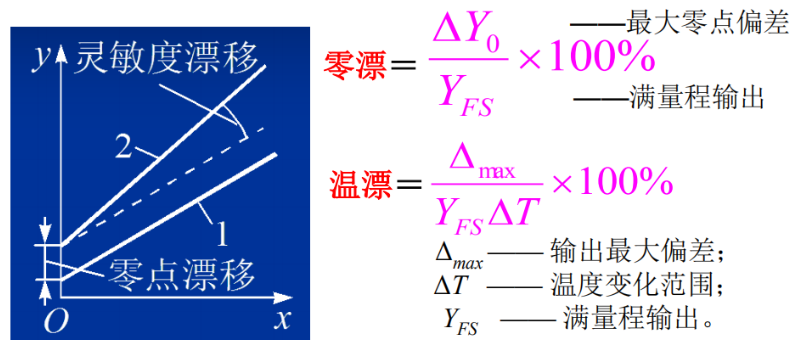
漂移:霍尔传感器在输入量不变的情况下,输出量随时间变化的现象。
Ø 霍尔传感器不因输入的原因而发生的变化
Ø 零点漂移和灵敏度漂移
Ø 时漂、温漂
时间漂移是指在规定的条件下,零点或灵敏度随时间的缓慢变化。
温度漂移为环境温度变化而引起的零点或灵敏度漂移。
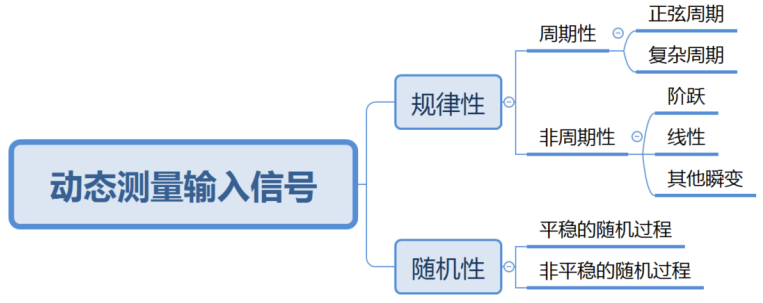
二. 霍尔传感器的动态特性
-
当输入量随时间变化时,输入与输出间的关系(动态量指周期信号、瞬变信号或随机信号)。我们常见的线性霍尔就是动态的,输出电压与磁场强度成线性关系,可精确测量磁场的连续变化。
-
动态特性取决于霍尔传感器本身,另一方面也与被测参量的变化形式有关。
-
对数幅频特性:将各种频率不同而幅值相等的正弦信号输入霍尔传感器,其它输出正弦信号的幅值、相位与输入信号频率之间的关系。
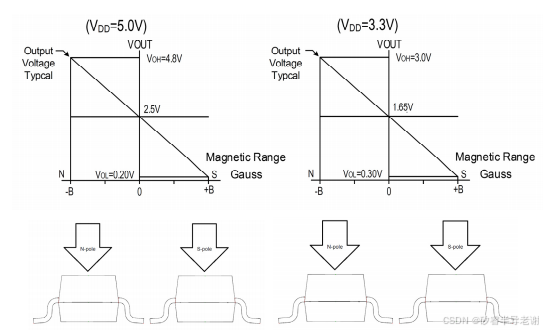
三. 线性霍尔传感器推荐
给大家推荐一款矽睿半导体的霍尔传感器SWG515NS系列, 供电电压电压为3.0V或者5.5V,精度要求±10%。
-
灵敏度选项:3.25mV/G OR 5.0mV/G
-
精度高:在工作温度区内精度优于10%,该精度适合于任何波形的测量;
-
线性度好:优于0.1%
-
静态功耗 : 2mA@5V
-
ESD(HBM) : 8K
-
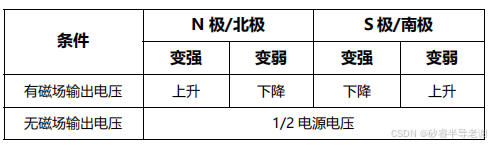
典型设计输出电压与磁场强度的关系见下图:

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 26
26 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)