目标检测算法发展历程
·
一、本篇简单介绍:
(1)基于锚框 和 无锚框的关系
(2)什么是感受野,感受野的中心、步长怎么计算
(3)简单了解目标检测算法的发展进程以及流程
二、目标检测算法的发展历程:从滑窗到密集预测
(一)滑窗 sliding window
(1)设定多个固定大小的窗口(方便检测不同尺度的目标)
(2)用这些窗口去遍历图像的所有位置,所到之处,都用卷积网络识别窗口中的内容
缺点:计算成本高,会有很多冗余的计算
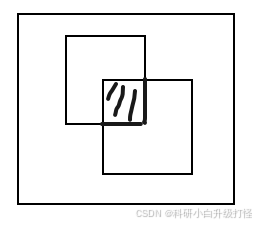
图中阴影部分会重复的经过卷积,属于冗余计算
(二)密集预测
简单来说,密集预测就是一次性的计算出所有位置的卷积
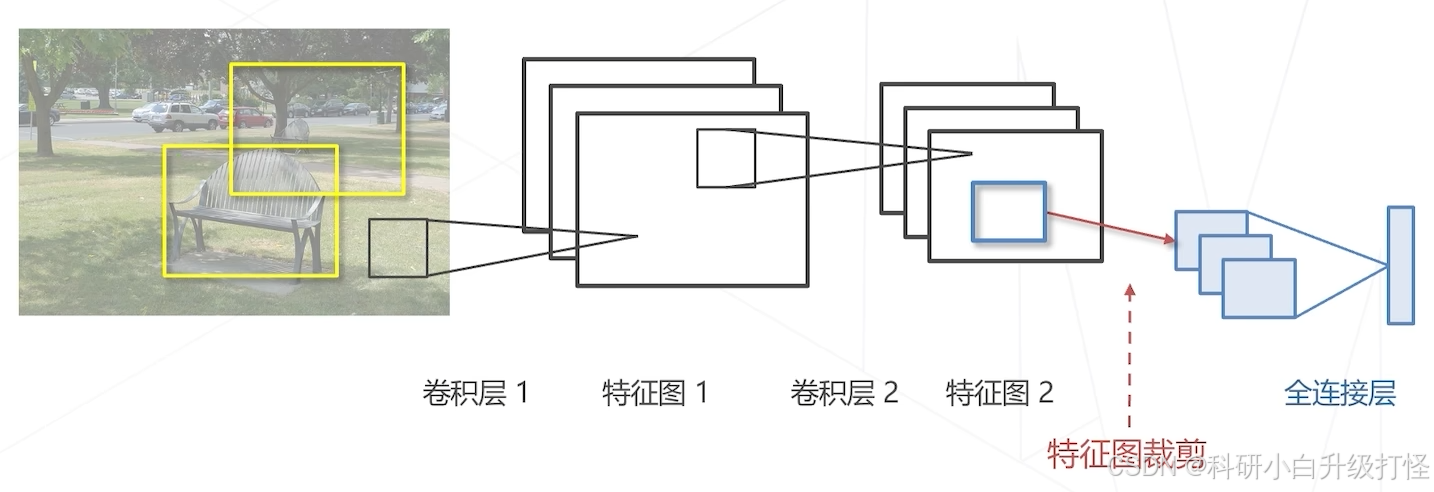
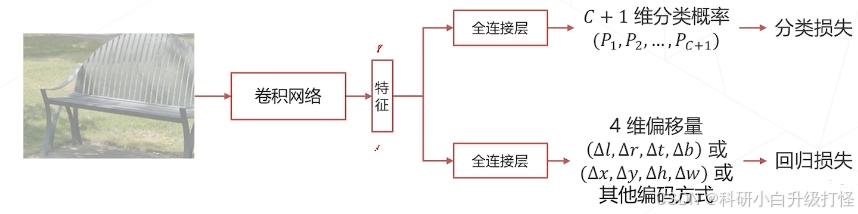
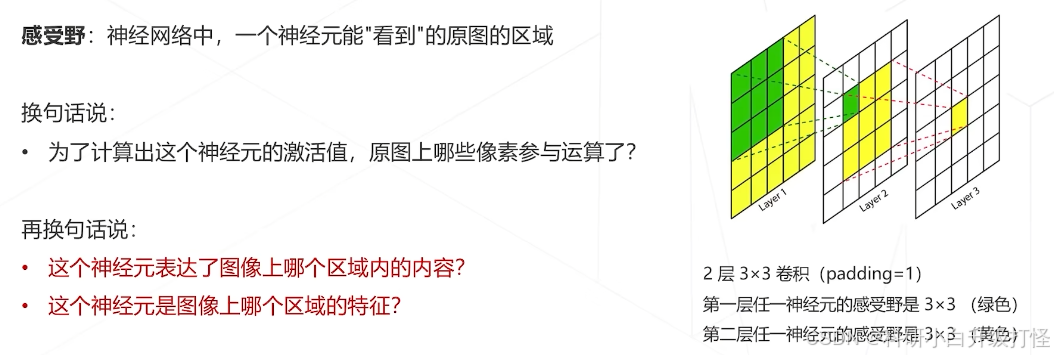
一次性的经过卷积之后,从特征图上的像素点找其对应到原图上的感受野,然后去看原图感受野中包含了什么物体:
(1)要对感受野进行分类,即类别预测
(2)要对感受野进行回归预测
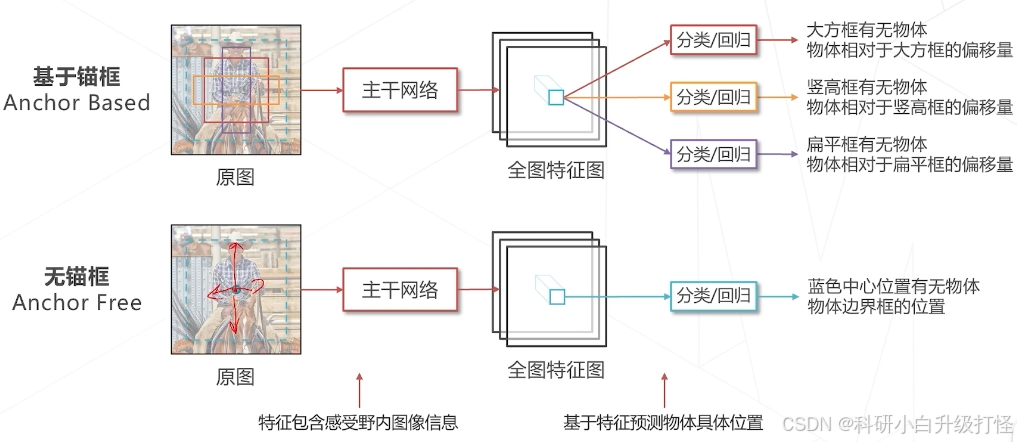
 而对于边界框回归有两种套路:基于锚框 和 无锚框
而对于边界框回归有两种套路:基于锚框 和 无锚框
基于锚框、无锚框
基于锚框:就是在图像上会生成很多大小不同的锚框,然后在特征图上去做分类回归预测是基于锚框去做的,比如这个人相较于这个紫色的框的偏移量有多少要给预测出来。
而无锚框的方法是直接去回归物体边界相对于感受野中心的距离。
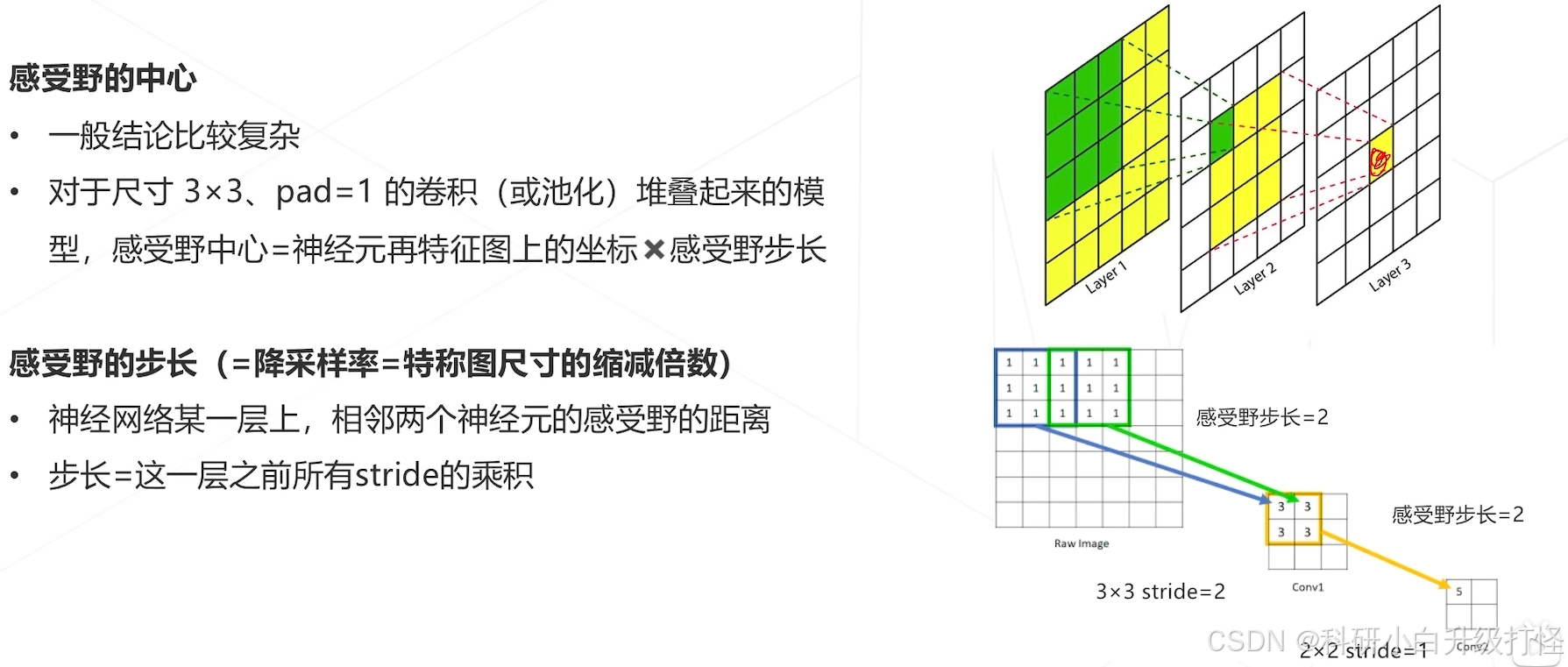
三、感受野
感受野的中心和步长的计算:
参考链接:

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 8
8 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)