从UNet训练到TensorRT部署:完整语义分割模型部署优化指南(windows版本)
本文详细介绍了从UNet模型训练到TensorRT部署的完整流程,涵盖了数据准备、模型训练、ONNX导出、TensorRT优化以及Python/C++推理实现等关键环节。通过TensorRT部署,我们能够显著提升模型的推理速度,满足实际生产环境对实时性的要求
1. 引言
语义分割是计算机视觉领域的重要任务,它要求对图像中的每个像素进行分类。UNet作为一种经典的语义分割网络架构,在医学影像、自动驾驶、遥感图像分析等领域有着广泛应用。然而,在实际生产环境中,我们往往需要将训练好的模型部署到边缘设备或服务器上,这就涉及到模型优化和加速的问题。
TensorRT是NVIDIA推出的高性能深度学习推理库,能够显著提升模型在NVIDIA GPU上的推理速度。本文将详细介绍从UNet模型训练到TensorRT部署的完整流程,包括环境配置、数据准备、模型训练、ONNX导出、TensorRT转换以及C++/Python推理实现。
2. 环境准备
2.1 基础环境安装
前置环境:vs2022社区版,可以自行安装
在开始之前,我们需要配置好基础环境:
2.1.1 推荐版本组合
(可以先用deepseek搜,不然中途容易出错不兼容)
| 组件 | 推荐版本 | 关键说明 |
|---|---|---|
| python | 3.10 | 兼容tensorRT,vit等,更新的版本目前tensoRT不兼容 |
| CUDA | 11.8 (主版本必须匹配) | TensorRT 8.6.0.12 官方明确支持 CUDA 11.8 |
| TensorRT | 8.6.0.12 | |
| cuDNN | 8.9.2.26 | TensorRT 8.6.x 依赖 cuDNN 8.9.x |
| PyTorch | 2.0.1+cu118 | PyTorch 官方为 CUDA 11.8 提供预编译包(从 2.0 开始支持) |
| ONNX | 1.14.0 | 兼容 PyTorch 2.0+ 和 TensorRT 8.6 |
| ONNX Runtime | 1.15.1 | 必须匹配 ONNX 版本 |
2.1.2 CUDA和cuDNN安装:
2.1.3 pytorch安装
pip install torch==2.0.1+cu118 torchvision==0.15.2+cu118 torchaudio==2.0.2+cu118 \
-i https://mirrors.aliyun.com/pypi/simple/ \
--trusted-host mirrors.aliyun.com或者(更推荐)
pip install torch==2.0.1+cu118 torchvision==0.15.2+cu118 torchaudio==2.0.2+cu118 \
-f https://mirrors.aliyun.com/pytorch-wheels/torch_stable.html验证安装
import torch
print(torch.__version__) # 应输出 2.0.1+cu118
print(torch.cuda.is_available()) # 应输出 True
print(torch.cuda.get_device_name(0)) # 显示GPU型号2.1.4 ONNX 和 ONNX Runtime安装
pip install onnx==1.14.0 onnxruntime-gpu==1.15.1 -i https://mirrors.aliyun.com/pypi/simple/2.1.5 TensorRT 8.6.0.12 安装
详解Windows系统安装TensorRT_windows安装tensorrt-CSDN博客
注意最后要在python环境中安装whl来导入tensorRT,保证tensoRT的C++与Python环境一致
2.1.6 opencv安装
c++版本
https://blog.csdn.net/qq_41277822/article/details/104018866
https://blog.csdn.net/qq_27278957/article/details/108224325
python版本
pip install opencv-python==4.5.5.64 -i https://mirrors.aliyun.com/pypi/simple/2.2 python其他依赖库安装
pip install albumentations pandas scikit-learn labelme -i https://mirrors.aliyun.com/pypi/simple/
pip install segmentation-models-pytorch -i https://mirrors.aliyun.com/pypi/simple/
pip install tensorboardx timm tqdm wandb -i https://mirrors.aliyun.com/pypi/simple/3. 数据准备与标注
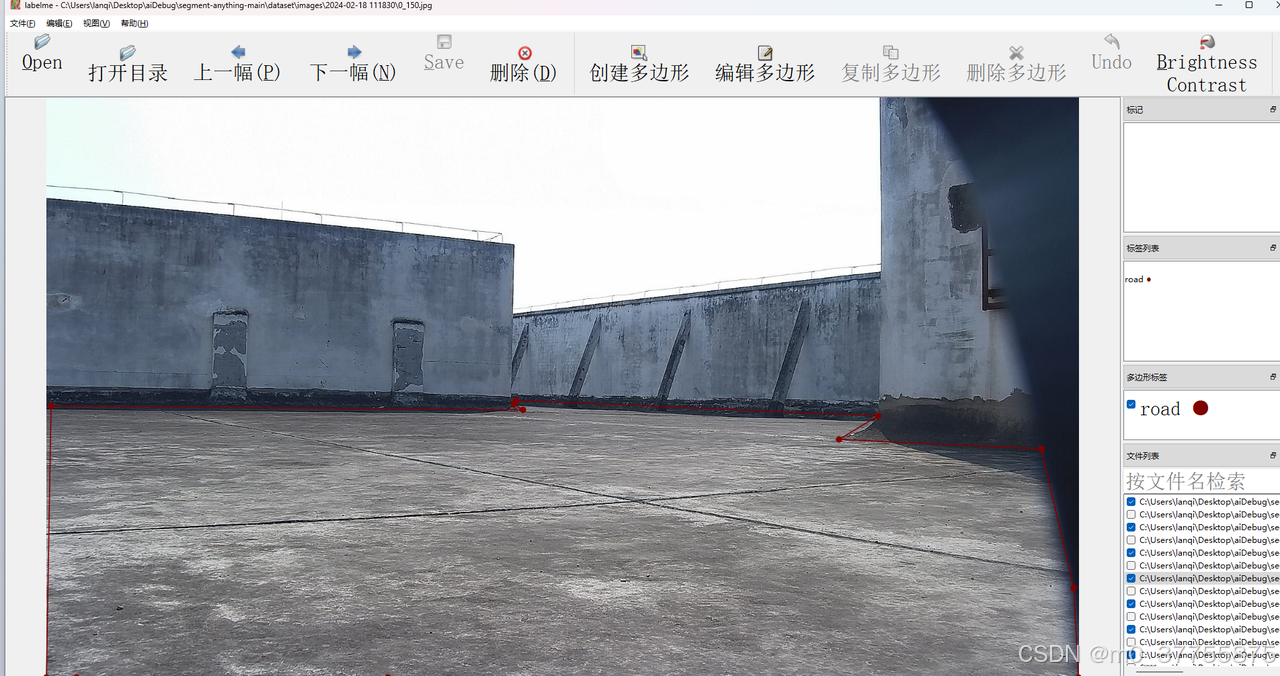
3.1 标注流程:
-
打开图像文件
-
使用多边形工具绘制目标区域
-
为每个区域指定类别标签
-
保存为JSON格式
{
"version": "5.4.1",
"flags": {},
"shapes": [
{
"label": "road",
"points": [
[
11.602409638554185,
770.3949016703393
],
[
488.9156626506025,
619.5180722891566
],
[
1858.7951807228915,
652.0481927710844
],
[
1891.1204819277104,
799.3105643209418
],
[
1919.0,
1079.0
],
[
0.9999999999998863,
1080.0
]
],
"group_id": null,
"description": null,
"shape_type": "polygon",
"flags": {},
"mask": null
}
],
"imagePath": "0_0.jpg",
"imageHeight": 1080,
"imageWidth": 1920
}3.2 JSON转Mask转换
LabelMe生成的JSON标注需要转换为二值Mask图像以供训练使用:
import json
import json
from PIL import Image, ImageDraw
import glob
import os
def points_to_mask(json_data, image_path):
# 解析JSON数据
data = json.loads(json_data)
height = data["imageHeight"]
width = data["imageWidth"]
# 创建一个新的和原图同样大小的白色背景图像,用于存储mask
mask = Image.new('1', (width, height), color=0) # '1'表示1位像素(黑白)
draw = ImageDraw.Draw(mask)
# 遍历 shapes 中的多边形
for shape in data["shapes"]:
if shape["shape_type"] == "polygon":
points = [(p[0], p[1]) for p in shape["points"]]
draw.polygon(points, outline=1, fill=1) # 填充前景为白色(值为1)
# 将图像保存为二进制掩模文件(例如:a_mask.png)
mask.save(f"{image_path.split('.')[0]}_mask.png", "PNG")
if __name__ == '__main__':
directory = r"C:\Users\lanqi\Desktop\aiDebug\segment-anything-main\dataset\images"
for root, dirs, files in os.walk(directory):
# 仅处理.json文件
for file in files:
if file.endswith(".json"):
# 构建完整文件路径
file_path = os.path.join(root, file)
# 打开并读取json文件
with open(file_path, 'r', encoding='utf-8') as f:
data = json.load(f)
height = data["imageHeight"]
width = data["imageWidth"]
# 创建一个新的和原图同样大小的白色背景图像,用于存储mask
mask = Image.new('1', (width, height), color=0) # '1'表示1位像素(黑白)
draw = ImageDraw.Draw(mask)
polyshape = data["shapes"]
image_path = os.path.join(root, data["imagePath"])
# 遍历 shapes 中的多边形
for shape in data["shapes"]:
if shape["shape_type"] == "polygon":
points = [(p[0], p[1]) for p in shape["points"]]
draw.polygon(points, outline=1, fill=1) # 填充前景为白色(值为1)
# 将图像保存为二进制掩模文件(例如:a_mask.png)
mask.save(f"{image_path.split('.')[0]}_mask.png", "PNG")
# 处理数据(这里只是一个打印示例)
print(f"Reading JSON file: {file_path}")
# print(json.dumps(data, indent=2))
# 在此处进行你对JSON数据的进一步处理或操作4. UNet模型训练
4.1 模型架构定义
我们使用segmentation_models_pytorch库快速构建UNet模型:
model.py
import segmentation_models_pytorch as smp
from CFG import *
import torch
def build_model():
model = smp.Unet(
encoder_name=CFG.backbone, # choose encoder, e.g. mobilenet_v2 or efficientnet-b7
encoder_weights="imagenet", # use `imagenet` pre-trained weights for encoder initialization
in_channels=3, # model input channels (1 for gray-scale images, 3 for RGB, etc.)
classes=CFG.num_classes, # model output channels (number of classes in your dataset)
activation=None,
)
model.to(CFG.device)
return model
def load_model(path):
model = build_model()
model.load_state_dict(torch.load(path))
model.eval()
return model4.2 训练配置
CFG.py
import torch
class CFG:
seed = 101
debug = False # set debug=False for Full Training
exp_name = '2.5D'
comment = 'unet-efficientnet_b0-160x192-ep=15'
model_name = 'Unet'
backbone = 'efficientnet-b0'
train_bs = 2
valid_bs = train_bs
img_size = [1088, 1920]
epochs = 15
lr = 2e-3
scheduler = 'CosineAnnealingLR'
min_lr = 1e-6
T_max = int(30000/train_bs*epochs)+50
T_0 = 15
warmup_epochs = 0
wd = 1e-6
n_accumulate = max(1, 32//train_bs)
n_fold = 5
folds = [0]
num_classes = 3
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")4.3 数据加载及训练和预测代码
from sklearn.model_selection import StratifiedKFold, KFold
import numpy as np
import pandas as pd
pd.options.plotting.backend = "plotly"
import random
from glob import glob
import os, shutil
from tqdm import tqdm
tqdm.pandas()
import time
import copy
import joblib
from collections import defaultdict
import gc
# from IPython import display as ipd
# visualization
import cv2
import matplotlib.pyplot as plt
from matplotlib.patches import Rectangle
from CFG import *
# Sklearn
# PyTorch
import torch
import torch.nn as nn
import torch.optim as optim
from torch.optim import lr_scheduler
from torch.utils.data import Dataset, DataLoader
from torch.cuda import amp
# Albumentations for augmentations
import albumentations as A
from albumentations.pytorch import ToTensorV2
import rasterio
from joblib import Parallel, delayed
# For colored terminal text
from colorama import Fore, Back, Style
c_ = Fore.GREEN
sr_ = Style.RESET_ALL
import warnings
from loss import *
warnings.filterwarnings("ignore")
data_transforms = {
"train": A.Compose([
# A.Resize(*CFG.img_size, interpolation=cv2.INTER_NEAREST),
A.OneOf([
A.HorizontalFlip(p=1),
A.VerticalFlip(p=1),
], p=1),
# A.RandomCrop(width=256, height=256),
# A.Affine(scale=(0.9,1.1), rotate = (-15,15), shear = (-7,7), p = 0.5),
A.RandomBrightnessContrast(brightness_limit=0.001, contrast_limit=0.001, p=0.5),
A.GaussNoise(var_limit=0.00002, p=0.5),
A.ShiftScaleRotate(shift_limit=0.0625, scale_limit=0.05, rotate_limit=10, p=0.5),
A.OneOf([
A.GridDistortion(num_steps=5, distort_limit=0.05, p=1.0),
# # A.OpticalDistortion(distort_limit=0.05, shift_limit=0.05, p=1.0),
A.ElasticTransform(alpha=1, sigma=50, alpha_affine=50, p=1.0)
], p=0.25),
A.CoarseDropout(max_holes=8, max_height=CFG.img_size[0] // 20, max_width=CFG.img_size[1] // 20,
min_holes=5, fill_value=0, mask_fill_value=0, p=0.5),
A.CenterCrop(width=1920, height=992),
], p=1.0),
"valid": A.Compose([
# A.Resize(*CFG.img_size, interpolation=cv2.INTER_NEAREST),
A.CenterCrop(width=1920, height=992),
], p=1.0)
}
def set_seed(seed=42):
'''Sets the seed of the entire notebook so results are the same every time we run.
This is for REPRODUCIBILITY.'''
np.random.seed(seed)
random.seed(seed)
torch.manual_seed(seed)
torch.cuda.manual_seed(seed)
# When running on the CuDNN backend, two further options must be set
torch.backends.cudnn.deterministic = True
torch.backends.cudnn.benchmark = False
# Set a fixed value for the hash seed
os.environ['PYTHONHASHSEED'] = str(seed)
print('> SEEDING DONE')
# imgage
def load_img(path):
img = cv2.imread(path)
img = img.astype('float32') # original is uint16
if img is None:
print(path)
mx = np.max(img)
if mx:
img /= mx # scale image to [0, 1]
return img
def load_msk(path):
msk = cv2.imread(path)
msk = msk[:,:,0]
if(msk is None):
print(path)
msk = msk.astype('float32')
msk /= 255.0
return msk
def show_img(img, mask=None):
clahe = cv2.createCLAHE(clipLimit=2.0, tileGridSize=(8, 8))
# img = clahe.apply(img)
# plt.figure(figsize=(10,10))
plt.imshow(img, cmap='bone')
if mask is not None:
# plt.imshow(np.ma.masked_where(mask!=1, mask), alpha=0.5, cmap='autumn')
plt.imshow(mask, alpha=0.5)
handles = [Rectangle((0, 0), 1, 1, color=_c) for _c in
[(0.667, 0.0, 0.0), (0.0, 0.667, 0.0), (0.0, 0.0, 0.667)]]
labels = ["Large Bowel", "Small Bowel", "Stomach"]
plt.legend(handles, labels)
plt.axis('off')
# rle
# ref: https://www.kaggle.com/paulorzp/run-length-encode-and-decode
def rle_decode(mask_rle, shape):
'''
mask_rle: run-length as string formated (start length)
shape: (height,width) of array to return
Returns numpy array, 1 - mask, 0 - background
'''
s = mask_rle.split()
starts, lengths = [np.asarray(x, dtype=int) for x in (s[0:][::2], s[1:][::2])]
starts -= 1
ends = starts + lengths
img = np.zeros(shape[0] * shape[1], dtype=np.uint8)
for lo, hi in zip(starts, ends):
img[lo:hi] = 1
return img.reshape(shape) # Needed to align to RLE direction
# dataset
class BuildDataset(torch.utils.data.Dataset):
def __init__(self,df, label=True, transforms=None):
self.label = label
self.img_paths = df["imgpath"]
self.mask_paths = df["maskpath"]
# for path in self.img_paths :
# new_path = path.replace(".jpg", "_mask.png")
# self.mask_paths.append(new_path)
self.transforms = transforms
def __len__(self):
return len(self.img_paths)
def __getitem__(self, index):
img_path = self.img_paths[index]
img = load_img(img_path)
if self.label:
msk_path = self.mask_paths[index]
msk = load_msk(msk_path)
if self.transforms:
data = self.transforms(image=img, mask=msk)
img = data['image']
msk = data['mask']
img = np.transpose(img, (2, 0, 1))
msk = np.transpose(msk, (2, 0, 1))
return torch.tensor(img), torch.tensor(msk)
else:
if self.transforms:
data = self.transforms(image=img)
img = data['image']
img = np.transpose(img, (2, 0, 1))
return torch.tensor(img)
# train function
def train_one_epoch(model, optimizer, scheduler, dataloader, device, epoch):
model.train()
scaler = amp.GradScaler()
dataset_size = 0
running_loss = 0.0
pbar = tqdm(enumerate(dataloader), total=len(dataloader), desc='Train ')
for step, (images, masks) in pbar:
images = images.to(device, dtype=torch.float)
masks = masks.to(device, dtype=torch.float)
batch_size = images.size(0)
with amp.autocast(enabled=True):
y_pred = model(images)
loss = criterion(y_pred, masks)
loss = loss / CFG.n_accumulate
scaler.scale(loss).backward()
if (step + 1) % CFG.n_accumulate == 0:
scaler.step(optimizer)
scaler.update()
# zero the parameter gradients
optimizer.zero_grad()
if scheduler is not None:
scheduler.step()
running_loss += (loss.item() * batch_size)
dataset_size += batch_size
epoch_loss = running_loss / dataset_size
mem = torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0
current_lr = optimizer.param_groups[0]['lr']
pbar.set_postfix(train_loss=f'{epoch_loss:0.4f}',
lr=f'{current_lr:0.5f}',
gpu_mem=f'{mem:0.2f} GB')
torch.cuda.empty_cache()
gc.collect()
return epoch_loss
# valid
@torch.no_grad()
def valid_one_epoch(model, dataloader, device, optimizer,epoch):
model.eval()
dataset_size = 0
running_loss = 0.0
val_scores = []
pbar = tqdm(enumerate(dataloader), total=len(dataloader), desc='Valid ')
for step, (images, masks) in pbar:
images = images.to(device, dtype=torch.float)
masks = masks.to(device, dtype=torch.float)
batch_size = images.size(0)
y_pred = model(images)
loss = criterion(y_pred, masks)
running_loss += (loss.item() * batch_size)
dataset_size += batch_size
epoch_loss = running_loss / dataset_size
y_pred = nn.Sigmoid()(y_pred)
val_dice = dice_coef(masks, y_pred).cpu().detach().numpy()
val_jaccard = iou_coef(masks, y_pred).cpu().detach().numpy()
val_scores.append([val_dice, val_jaccard])
mem = torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0
current_lr = optimizer.param_groups[0]['lr']
pbar.set_postfix(valid_loss=f'{epoch_loss:0.4f}',
lr=f'{current_lr:0.5f}',
gpu_memory=f'{mem:0.2f} GB')
val_scores = np.mean(val_scores, axis=0)
torch.cuda.empty_cache()
gc.collect()
return epoch_loss, val_scores
def run_training(model, optimizer, scheduler, device, num_epochs,train_loader,valid_loader):
# To automatically log gradients
if torch.cuda.is_available():
print("cuda: {}\n".format(torch.cuda.get_device_name()))
start = time.time()
best_model_wts = copy.deepcopy(model.state_dict())
best_dice = -np.inf
best_epoch = -1
history = defaultdict(list)
for epoch in range(1, num_epochs + 1):
gc.collect()
print(f'Epoch {epoch}/{num_epochs}', end='')
train_loss = train_one_epoch(model, optimizer, scheduler,
dataloader=train_loader,
device=CFG.device, epoch=epoch)
val_loss, val_scores = valid_one_epoch(model, valid_loader,
device=CFG.device,
optimizer=optimizer,
epoch=epoch)
val_dice, val_jaccard = val_scores
history['Train Loss'].append(train_loss)
history['Valid Loss'].append(val_loss)
history['Valid Dice'].append(val_dice)
history['Valid Jaccard'].append(val_jaccard)
# Log the metrics
print(f'Valid Dice: {val_dice:0.4f} | Valid Jaccard: {val_jaccard:0.4f}')
# deep copy the model
if val_dice >= best_dice:
print(f"{c_}Valid Score Improved ({best_dice:0.4f} ---> {val_dice:0.4f})")
best_dice = val_dice
best_jaccard = val_jaccard
best_epoch = epoch
best_model_wts = copy.deepcopy(model.state_dict())
PATH = f"best_epoch-{0:02d}.bin"
torch.save(model.state_dict(), PATH)
# Save a model file from the current directory
print(f"Model Saved{sr_}")
last_model_wts = copy.deepcopy(model.state_dict())
PATH = f"last_epoch-{0:02d}.bin"
torch.save(model.state_dict(), PATH)
end = time.time()
time_elapsed = end - start
print('Training complete in {:.0f}h {:.0f}m {:.0f}s'.format(
time_elapsed // 3600, (time_elapsed % 3600) // 60, (time_elapsed % 3600) % 60))
print("Best Score: {:.4f}".format(best_jaccard))
# load best model weights
model.load_state_dict(best_model_wts)
return model, history
def fetch_scheduler(optimizer):
if CFG.scheduler == 'CosineAnnealingLR':
scheduler = lr_scheduler.CosineAnnealingLR(optimizer, T_max=CFG.T_max,
eta_min=CFG.min_lr)
elif CFG.scheduler == 'CosineAnnealingWarmRestarts':
scheduler = lr_scheduler.CosineAnnealingWarmRestarts(optimizer, T_0=CFG.T_0,
eta_min=CFG.min_lr)
elif CFG.scheduler == 'ReduceLROnPlateau':
scheduler = lr_scheduler.ReduceLROnPlateau(optimizer,
mode='min',
factor=0.1,
patience=7,
threshold=0.0001,
min_lr=CFG.min_lr, )
elif CFG.scheduer == 'ExponentialLR':
scheduler = lr_scheduler.ExponentialLR(optimizer, gamma=0.85)
elif CFG.scheduler == None:
return None
return scheduler
def get_jpg_files(rootdir, format='.jpg'):
jpg_files = []
for root, dirs, files in os.walk(rootdir):
for file in files:
if file.endswith(format):
jpg_files.append(os.path.join(root, file))
return jpg_files
def prepare_loaders(train_df,valid_df, debug=False):
train_dataset = BuildDataset(train_df, transforms=data_transforms['train'])
valid_dataset = BuildDataset(valid_df, transforms=data_transforms['valid'])
train_loader = DataLoader(train_dataset, batch_size=CFG.train_bs if not debug else 20,
num_workers=8, shuffle=True, pin_memory=True, drop_last=False)
valid_loader = DataLoader(valid_dataset, batch_size=CFG.valid_bs if not debug else 20,
num_workers=8, shuffle=False, pin_memory=True)
return train_loader, valid_loader4.4 训练主循环
from segFunct import *
from CFG import *
from model import *
if __name__ == '__main__':
model = build_model()
optimizer = optim.Adam(model.parameters(), lr=CFG.lr, weight_decay=CFG.wd)
scheduler = fetch_scheduler(optimizer)
imageList = get_jpg_files(r"C:\Users\lanqi\Desktop\aiDebug\segment-anything-main\dataset\images")
maskList = []
for path in imageList :
new_path = path.replace(".jpg", "_mask.png")
maskList.append(new_path)
train_df={}
valid_df={}
datasize =len(imageList)
train_size = int(datasize*0.9)
train_df["imgpath"] = imageList[0:train_size]
train_df["maskpath"] = maskList[0:train_size]
valid_df["imgpath"] = imageList[train_size:]
valid_df["maskpath"] = maskList[train_size:]
for fold in CFG.folds:
train_loader, valid_loader = prepare_loaders(train_df, valid_df, debug=CFG.debug)
model = build_model()
optimizer = optim.Adam(model.parameters(), lr=CFG.lr, weight_decay=CFG.wd)
scheduler = fetch_scheduler(optimizer)
model, history = run_training(model, optimizer, scheduler,
device=CFG.device,
num_epochs=CFG.epochs,
train_loader=train_loader,
valid_loader=valid_loader)
# run.finish()
# display(ipd.IFrame(run.url, width=1000, height=720))5 模型推理和部署
5.1 Pytorch推理
import torch
import cv2
import numpy as np
from segFunct import load_img,data_transforms
from model import build_model
import time
if __name__ == '__main__':
# img = cv2.imread(r"C:\Users\lanqi\Desktop\aiDebug\segment-anything-main\Back\2\2024-02-18 162918\0_40.jpg")
img_copy = cv2.imread(r"C:\Users\lanqi\Desktop\aiDebug\segment-anything-main\Back\2\2024-02-18 162918\0_40.jpg")
img_copy = data_transforms['valid'](image=img_copy)['image']
img = load_img(r"C:\Users\lanqi\Desktop\aiDebug\segment-anything-main\Back\2\2024-02-18 162918\0_40.jpg")
img = data_transforms['valid'](image=img)
img = img['image']
img = np.transpose(img, (2, 0, 1))
img = torch.tensor(img)
img = torch.unsqueeze(img,dim = 0)
img = img.cuda()
model = build_model()
model.eval()
PATH = 'best_epoch-00.bin'
start_time = time.time()
# 使用torch.load()函数加载模型权重数据
state_dict = torch.load(PATH, map_location='cuda:0') # device可以是'cpu'或cuda:0等设备标识符
# 加载模型权重
model.load_state_dict(state_dict)
# 将模型设置为评估模式(如果需要进行预测或者评估)
with torch.no_grad():
y_pred = model(img)
numpy_array = y_pred.cpu().numpy()
numpy_array = np.squeeze(numpy_array)
image_hwc = numpy_array.transpose(1, 2, 0)
image_hwc = np.mean(image_hwc,axis=2,keepdims=True)
image_hwc = np.where(image_hwc > 0.5, 1, 0.3)
image_hwc = (img_copy * image_hwc).astype(np.uint8)
cv2.imwrite("abc.png",image_hwc)
end_time = time.time()
execution_time = end_time - start_time
print(f"Your function executed in: {execution_time} seconds")分割结果

推理时间

5.2 PyTorch转ONNX
import torch.nn as nn
import cv2
import torch.nn.functional as F
import numpy as np
import onnx
from model import *
class Preprocess(nn.Module):
def __init__(self,path= 'best_epoch-00.bin'):
super().__init__()
self.mean = 1
self.var = 1
self.model = smp.Unet(
encoder_name=CFG.backbone, # choose encoder, e.g. mobilenet_v2 or efficientnet-b7
encoder_weights="imagenet", # use `imagenet` pre-trained weights for encoder initialization
in_channels=3, # model input channels (1 for gray-scale images, 3 for RGB, etc.)
classes=CFG.num_classes, # model output channels (number of classes in your dataset)
activation=None,
)
self.model.to(torch.device("cpu"))
state_dict = torch.load(path, map_location='cpu') # device可以是'cpu'或cuda:0等设备标识符
# 加载模型权重
self.model.load_state_dict(state_dict)
def forward(self,x):
x = x.to(torch.float32)
mx = torch.max(x)
x /= mx # scale image to [0, 1]
x = F.pad(x, pad=(0,0, 0, 0,4,4), mode='constant', value=0.0)
x = x.permute(2, 0, 1)
x = torch.unsqueeze(x, dim=0)
x = self.model(x)
x = torch.squeeze(x)
x = x.permute(1, 2, 0)
x = torch.mean(x, dim=2, keepdims=True)
return x
if __name__ == '__main__':
img= cv2.imread(r"C:\Users\lanqi\Desktop\aiDebug\segment-anything-main\Back\2\2024-02-18 162918\0_40.jpg")
img_copy = img.copy()
img = img.astype(np.float32)
img = torch.from_numpy(img)#1080 1920 3,uint8
preMode = Preprocess()
# with torch.no_grad():
# img = preMode(img)
#
#
# numpy_array =img.numpy()
#
# image_hwc = np.where(numpy_array > 0.5, 1, 0.3)
#
# image_hwc = image_hwc[4:-4,:,:]
# image_hwc = (img_copy * image_hwc).astype(np.uint8)
#
# cv2.imwrite("abcd.png",image_hwc)
torch.onnx.export(
preMode,
# 这里的args,是指输入给model的参数,需要传递tuple,因此用括号
(img,),
# 储存的文件路径
"Preprocess.onnx",
# 打印详细信息
verbose=True,
# 为输入和输出节点指定名称,方便后面查看或者操作
input_names=["image"],
output_names=["model_input"],
# 这里的opset,指,各类算子以何种方式导出,对应于symbolic_opset11
opset_version=11,
)注意:模型导出时并不是直接导出模型,而是进行了输入输出封装,以简化tensor推理在C++的前处理和后处理流程,另外涉及到一些并行运算,也可以提高处理速度
onnx运行验证
import onnx
import cv2
import numpy as np
import onnxruntime
if __name__ == '__main__':
img= cv2.imread(r"C:\Users\lanqi\Desktop\aiDebug\segment-anything-main\Back\2\2024-02-18 162918\0_40.jpg")
img = img.astype(np.float32)
ort_session = onnxruntime.InferenceSession("Preprocess.onnx")
input_name = ort_session.get_inputs()[0].name # 获取模型输入名
img_input =aimg # 调整维度到CHW(如果需要的话)
model_output = ort_session.run(None, {input_name: img_input})[0]
image_hwc = np.where(model_output > 0.5, 1, 0.3)
image_hwc = image_hwc[4:-4,:,:]
image_hwc = (img * image_hwc).astype(np.uint8)
cv2.imwrite("abcde.png",image_hwc)
a = 0运行结果

5.3 TensorRT引擎生成和推理
可参考:https://blog.csdn.net/weixin_42492254/article/details/126028199
5.3.1 使用trtexec工具将ONNX转换为TensorRT引擎:
trtexec.exe --onnx=model.onnx --saveEngine=model.trt --fp165.3.2 Python tensorRT运行推理
import tensorrt as trt
import pycuda.driver as cuda
import pycuda.autoinit
import numpy as np
import cv2
import time
# 设置TensorRT日志级别
TRT_LOGGER = trt.Logger()
def get_engine(engine_path):
"""
从文件加载序列化的TensorRT引擎
"""
print(f"从文件 {engine_path} 加载引擎")
with open(engine_path, "rb") as f, trt.Runtime(TRT_LOGGER) as runtime:
return runtime.deserialize_cuda_engine(f.read())
# 加载模型引擎(此处替换为实际的.engine文件路径)
engine = get_engine("model.trt")
# 打印引擎信息及输入输出绑定的相关数据
for binding in engine:
# 计算当前绑定的内存大小(volume)并获取维度信息
size = trt.volume(engine.get_binding_shape(binding)) * 1
dims = engine.get_binding_shape(binding)
print(size)
print(dims)
print(binding)
# 检查当前binding是否为输入
print(engine.binding_is_input(binding))
# 设定输入输出数据类型(假设为float32)
dtype = np.float32
print(f"data type: {dtype}")
# 创建执行上下文
context = engine.create_execution_context()
# def preprocess_image(image_path):
# """
# 预处理图像,将其转换为适合模型输入的格式
# """
# img = cv2.imread(image_path)
# # 这里可能需要对图像进行缩放、归一化等预处理操作以适应模型要求
# # 示例中未提供具体的预处理步骤,请根据模型需求自行添加
# return img
def get_landmarks(image):
"""
使用TensorRT引擎进行推理,并返回预测结果
"""
# 将输入图像转换为浮点型numpy数组,并准备CUDA pinned内存
img_in = image
h_input = cuda.pagelocked_empty(trt.volume(context.get_binding_shape(0)), dtype=np.float32)
# 分配GPU内存并创建CUDA流
d_input = cuda.mem_alloc(h_input.nbytes)
stream = cuda.Stream()
# 将输入数据复制到CUDA pinned内存
np.copyto(h_input, img_in.ravel())
# 异步将输入数据从CPU拷贝到GPU
cuda.memcpy_htod_async(d_input, h_input, stream)
# 准备GPU内存用于存储输出结果
h_output = cuda.pagelocked_empty(trt.volume(context.get_binding_shape(1)), dtype=np.float32)
d_output = cuda.mem_alloc(h_output.nbytes)
# 执行推理
bindings = [int(d_input), int(d_output)]
context.execute_async_v2(bindings=bindings, stream_handle=stream.handle)
# 异步将输出数据从GPU拷贝回CPU
cuda.memcpy_dtoh_async(h_output, d_output, stream)
# 等待所有CUDA操作完成
stream.synchronize()
# 返回处理后的输出结果
return h_output.reshape(1088, 1920, 1)
# 测试函数性能
for i in range(0, 1000):
start_time = time.time()
img1 = cv2.imread(r"C:\Users\lanqi\Desktop\aiDebug\segment-anything-main\Back\2\2024-02-18 162918\0_40.jpg")
output = get_landmarks(img1)
# 对输出结果进行后处理(这里仅为示例,具体逻辑请按实际情况调整)
image_hwc = np.where(output > 0.5, 1, 0.3)
image_hwc = image_hwc[4:-4, :]
image_hwc = (img1 * image_hwc).astype(np.uint8)
end_time = time.time()
execution_time = end_time - start_time
cv2.imwrite("trt.png", image_hwc)
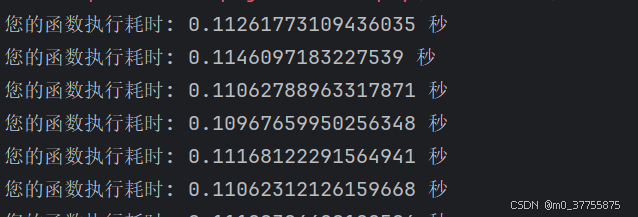
print(f"您的函数执行耗时: {execution_time} 秒")运行结果

推理时间
5.4 C++ tensorRT运行推理
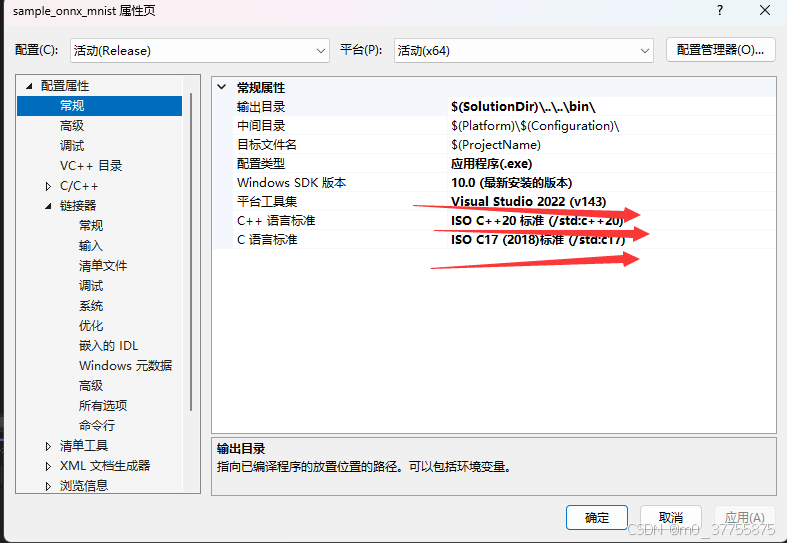
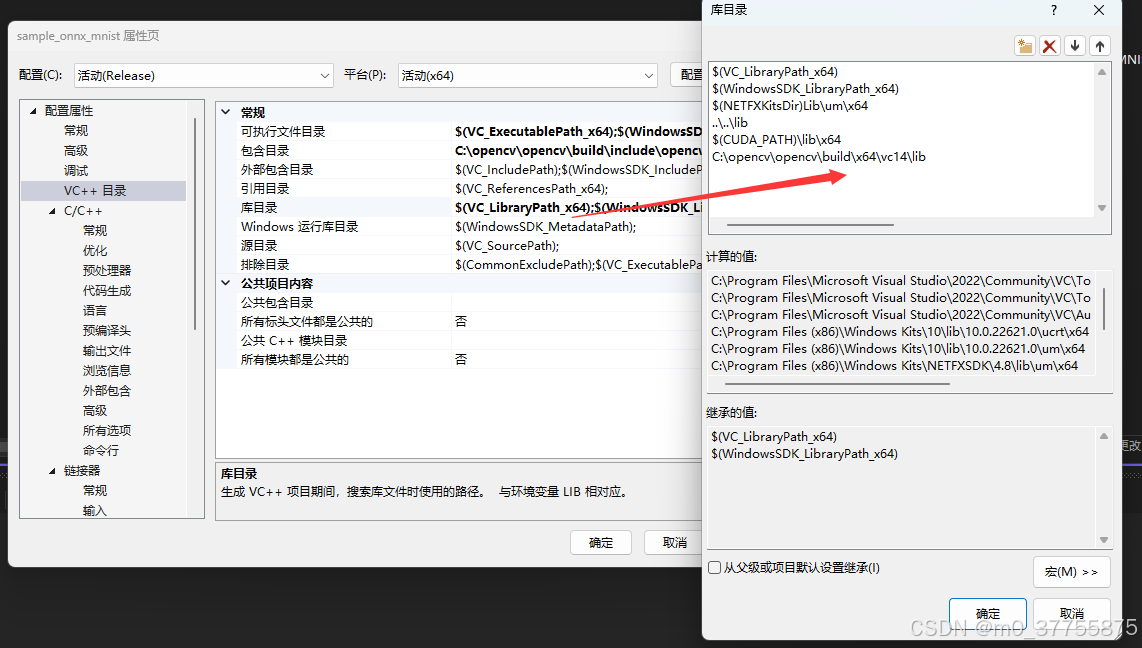
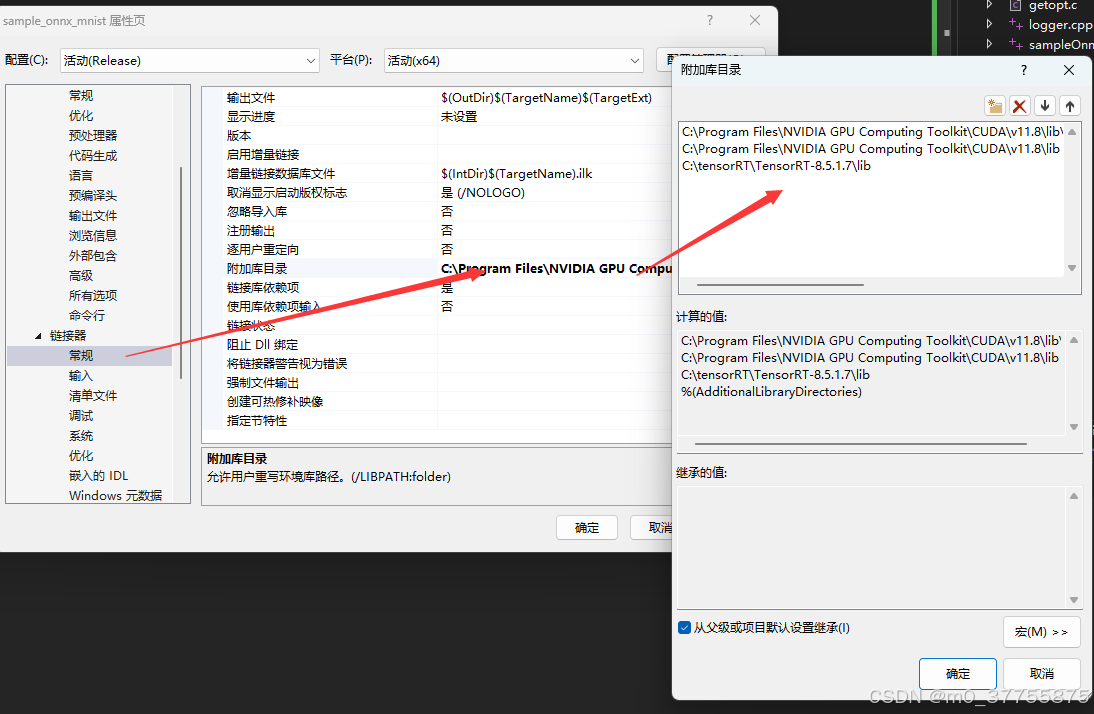
5.4.1 Visual studio 配置

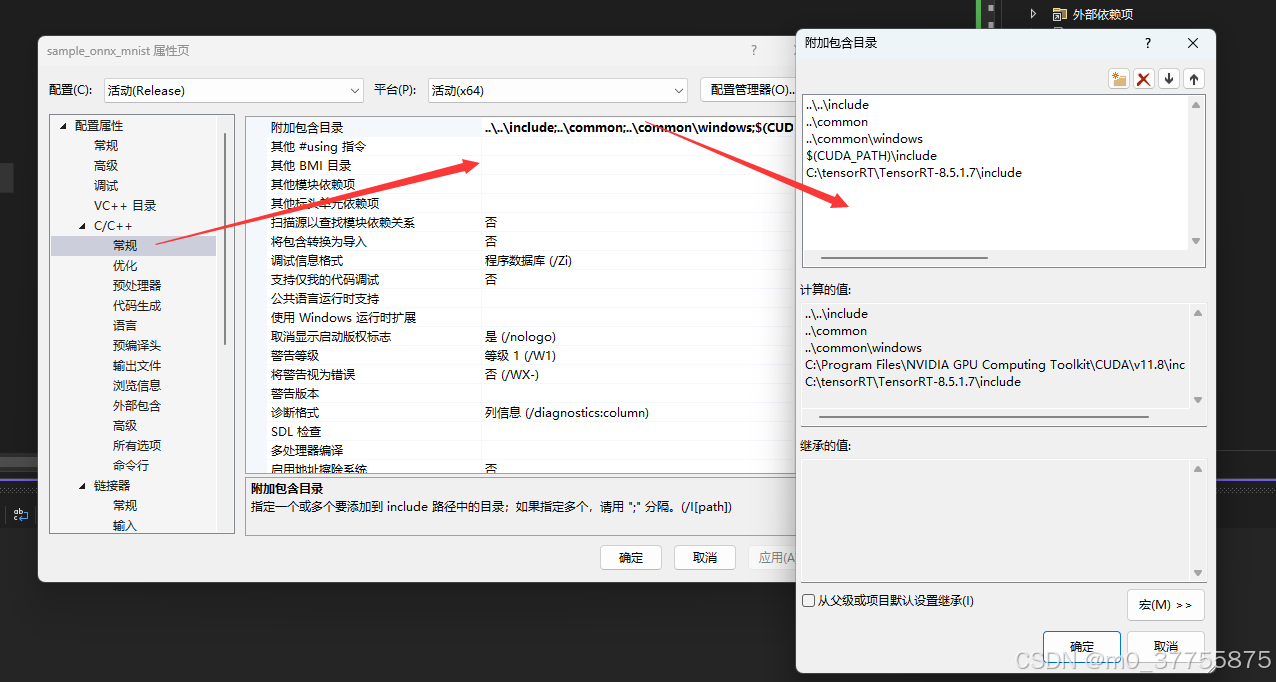
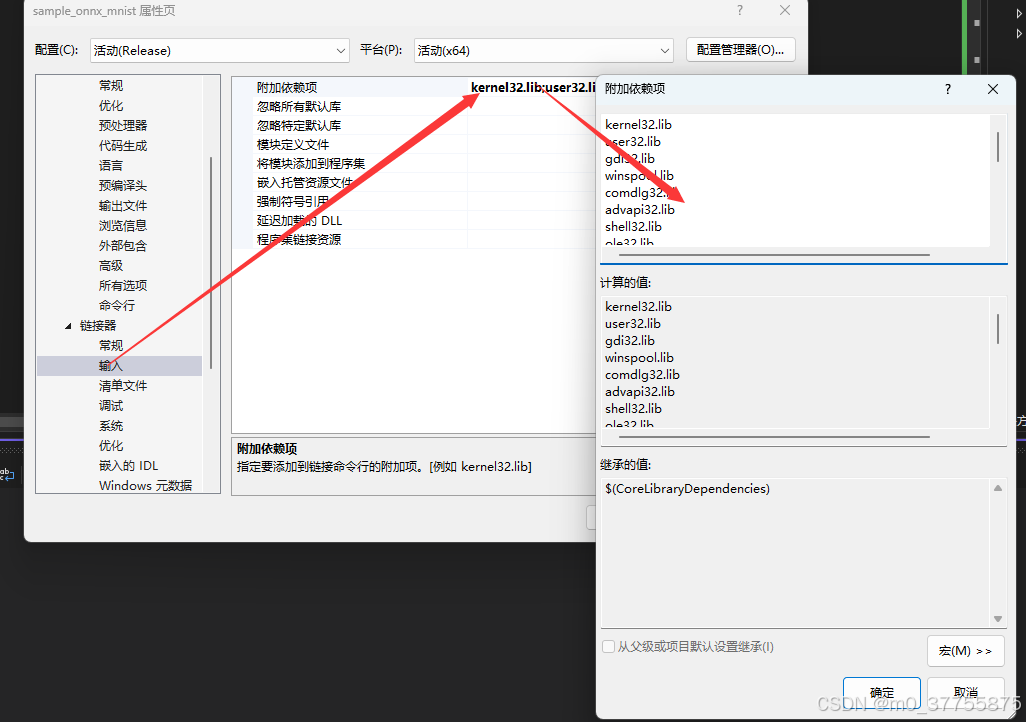
kernel32.lib
user32.lib
gdi32.lib
winspool.lib
comdlg32.lib
advapi32.lib
shell32.lib
ole32.lib
oleaut32.lib
uuid.lib
odbc32.lib
odbccp32.lib
%(AdditionalDependencies)
nvinfer.lib
nvinfer_plugin.lib
nvonnxparser.lib
nvparsers.lib
cudnn.lib
cublas.lib
cudart.lib
C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v11.8\lib\x64\*.lib
C:\tensorRT\TensorRT-8.5.1.7\lib\*.lib
opencv_world3410.lib5.4.2 C++代码
#include <fstream>
#include <iostream>
#include <NvInfer.h>
#include "logger.h"
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc.hpp>
#include <chrono>
#define CHECK(status) do{auto ret = (status); if (ret != 0){std::cerr << "Cuda failure: " << ret << std::endl; abort(); }} while (0)
using namespace nvinfer1;
using namespace sample;
using namespace std;
const char* IN_NAME = "image";
const char* OUT_NAME = "model_input";
static const int IN_H = 1080;
static const int IN_W = 1920;
static const int BATCH_SIZE = 1;
static const int EXPLICIT_BATCH = 1 << (int)(NetworkDefinitionCreationFlag::kEXPLICIT_BATCH);
class MyLogger : public nvinfer1::ILogger
{
public:
void log(Severity severity, const char* msg) noexcept override
{
// You can add your custom logging or store the error message in a variable.
if (severity == nvinfer1::ILogger::Severity::kERROR)
{
std::cerr << "TensorRT Error: " << msg << std::endl;
// Store the error message in a variable if needed.
}
}
};
void doInference(IExecutionContext & context, float* input, float* output, int batchSize)
{
const ICudaEngine& engine = context.getEngine();
// Pointers to input and output device buffers to pass to engine.
// Engine requires exactly IEngine::getNbBindings() number of buffers.
assert(engine.getNbBindings() == 2);
void* buffers[2];
// In order to bind the buffers, we need to know the names of the input and output tensors.
// Note that indices are guaranteed to be less than IEngine::getNbBindings()
const int inputIndex = engine.getBindingIndex(IN_NAME);
const int outputIndex = engine.getBindingIndex(OUT_NAME);
// Create stream
cudaStream_t stream;
CHECK(cudaStreamCreate(&stream));
// Create GPU buffers on device
CHECK(cudaMalloc(&buffers[inputIndex], 3 * IN_H * IN_W * sizeof(float)));
CHECK(cudaMalloc(&buffers[outputIndex], 1088 * IN_W * sizeof(float)));
// DMA input batch data to device, infer on the batch asynchronously, and DMA output back to host
if (cudaMemcpyAsync(buffers[inputIndex], input, 3 * IN_H * IN_W * sizeof(float), cudaMemcpyHostToDevice, stream) != cudaSuccess)
{
std::cerr << "cudaMemcpyAsync from host to device failed: " << cudaGetErrorString(cudaGetLastError()) << std::endl;
// Proper error handling and cleanup
cudaFree(buffers[inputIndex]);
cudaFree(buffers[outputIndex]);
cudaStreamDestroy(stream);
abort();
}
// Synchronize stream to ensure input data transfer is complete
cudaStreamSynchronize(stream);
// Run inference
context.enqueue(batchSize, buffers, stream, nullptr);
// Copy output data to host
if (cudaMemcpyAsync(output, buffers[outputIndex], 1088 * IN_W * sizeof(float), cudaMemcpyDeviceToHost, stream) != cudaSuccess)
{
std::cerr << "cudaMemcpyAsync from device to host failed: " << cudaGetErrorString(cudaGetLastError()) << std::endl;
// Proper error handling and cleanup
cudaFree(buffers[inputIndex]);
cudaFree(buffers[outputIndex]);
cudaStreamDestroy(stream);
abort();
}
// Synchronize stream to ensure output data transfer is complete
cudaStreamSynchronize(stream);
// Release stream and buffers
cudaStreamDestroy(stream);
cudaFree(buffers[inputIndex]);
cudaFree(buffers[outputIndex]);
};
int main()
{
MyLogger m_logger;
IExecutionContext* context = NULL;
ICudaEngine* engine = NULL;
IRuntime* runtime = NULL;
char* trtModelStream{ nullptr };
try {
// create a model using the API directly and serialize it to a stream
size_t size{ 0 };
std::ifstream file("model.trt", std::ios::binary);
if (file.good()) {
file.seekg(0, file.end);
size = file.tellg();
file.seekg(0, file.beg);
trtModelStream = new char[size];
assert(trtModelStream);
file.read(trtModelStream, size);
file.close();
}
runtime = createInferRuntime(m_logger);
assert(runtime != nullptr);
engine = runtime->deserializeCudaEngine(trtModelStream, size, nullptr);
if (!engine)
{
throw std::runtime_error("Failed to create TensorRT engine.");
}
context = engine->createExecutionContext();
if (!context)
{
throw std::runtime_error("Failed to create TensorRT execution context.");
}
// generate input data
// float data[BATCH_SIZE * 3 * IN_H * IN_W];
//很重要,分配堆空间,不要在栈空间
float* data = new float[BATCH_SIZE * 3 * IN_H * IN_W];
float* prob = new float[1088 * IN_W];
for(int i = 0;i<100;i++)
{
auto start_time = std::chrono::high_resolution_clock::now();
cv::Mat img = cv::imread("0_40.jpg");
if (img.empty())
{
throw std::runtime_error("Failed to read image.");
}
img.convertTo(img, CV_32FC3); // 将图像转换为float32并归一化
// cv::Mat img_float32_flat;
memcpy(data, img.data, sizeof(float) * IN_H * IN_W * 3);
// Run inference
doInference(*context, data, prob, BATCH_SIZE);
// Post-processing...
cv::Mat output_mat(1088, IN_W, CV_32FC1, prob);
cv::Mat binary_image;
cv::threshold(output_mat, binary_image, 0.5, 1.0, cv::THRESH_BINARY);
cv::Mat cropped_binary_image = binary_image(cv::Rect(0, 4, IN_W, 1080));
cv::Mat img1_float32 = img; // 已经读取并转换为float32类型的图像
cv::Mat cropped_color_image;
cv::cvtColor(cropped_binary_image, cropped_color_image, cv::COLOR_GRAY2BGR);
cv::Mat processed_img;
cv::multiply(img1_float32, cropped_color_image, processed_img);
processed_img.convertTo(processed_img, CV_8UC3);
cv::imwrite("trt.png", processed_img);
auto end_time = std::chrono::high_resolution_clock::now();
auto duration = std::chrono::duration_cast<std::chrono::milliseconds>(end_time - start_time);
// 输出程序运行时间
std::cout << "程序运行时间: " << duration.count() << " 毫秒" << std::endl;
}
delete[] prob;
delete[] data;
}
catch (const std::exception& e)
{
std::cerr << "Caught exception: " << e.what() << std::endl;
return 1;
}
// Destroy the engine
if (context)
{
context->destroy();
}
if (engine)
{
engine->destroy();
}
if (runtime)
{
runtime->destroy();
}
if (trtModelStream)
{
delete[] trtModelStream;
}
getchar();
return 0;
}5.4.3 推理结果
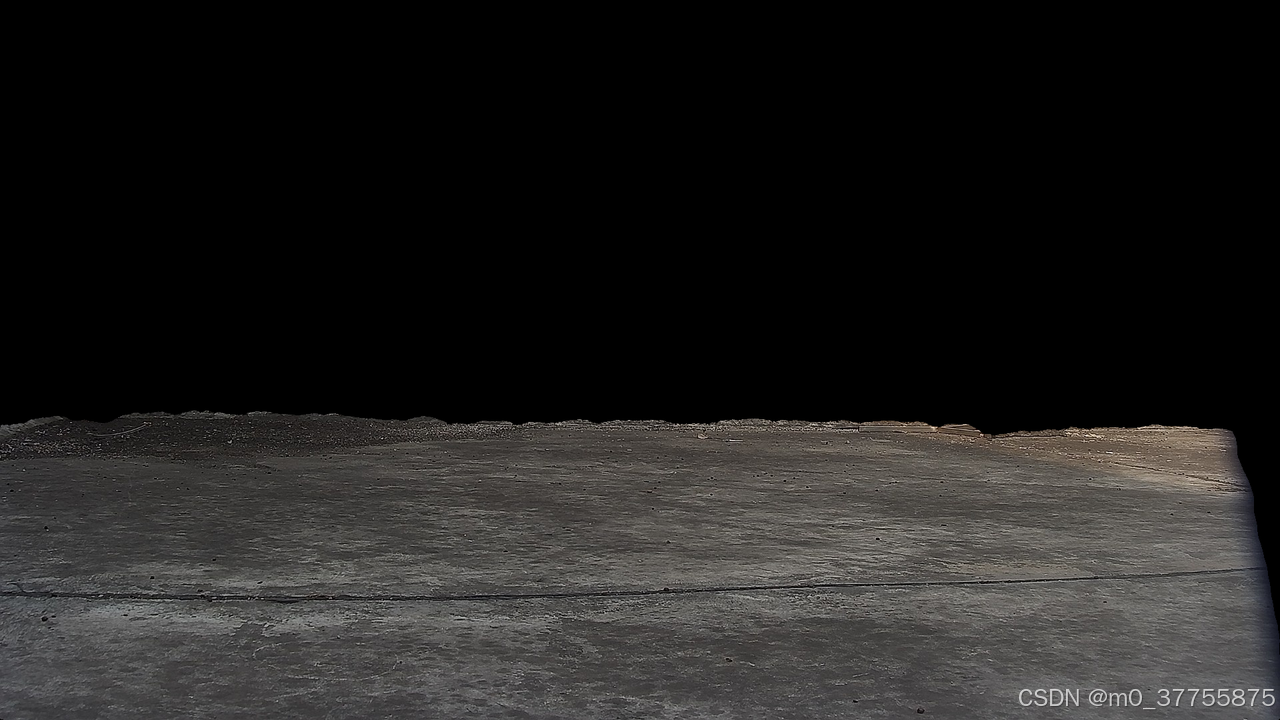
时间
6. 结论
本文详细介绍了从UNet模型训练到TensorRT部署的完整流程,涵盖了数据准备、模型训练、ONNX导出、TensorRT优化以及Python/C++推理实现等关键环节。通过TensorRT部署,我们能够显著提升模型的推理速度,满足实际生产环境对实时性的要求。
在实际应用中,还需要根据具体场景进行调整和优化,例如:
-
针对特定硬件平台进行调优
-
平衡精度和速度的关系
-
实现高效的流水线处理
希望本文能够为读者提供一条清晰的模型部署路径,帮助大家将训练好的语义分割模型高效地部署到生产环境中。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 24
24 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)