px4传感器数据sensor模块整理
·
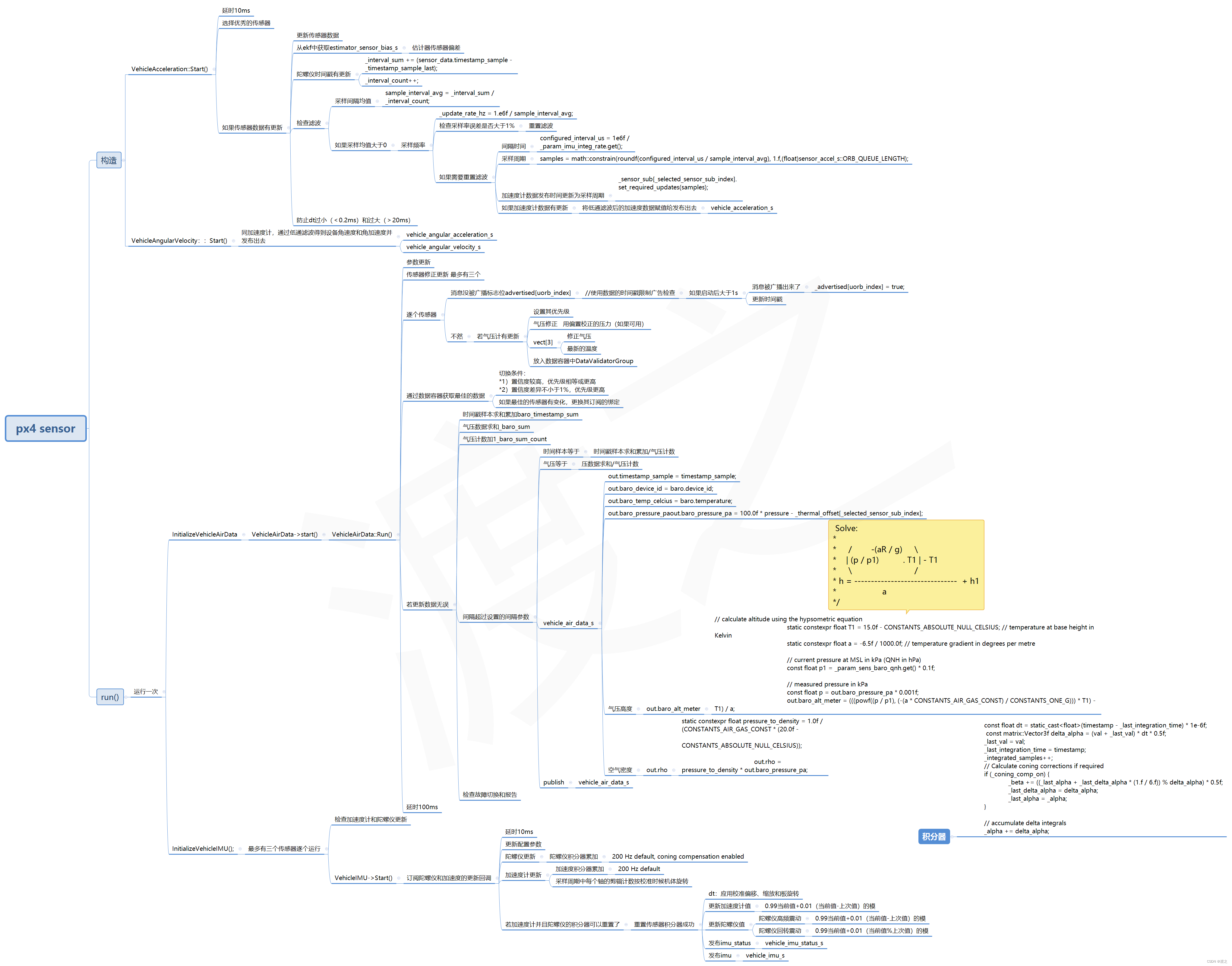
涉及传感器数据的流程,大致整理如下图
传感器的数据从drivers中调用lib中dirvers对应的对象更新数据并发布出去,sensor模块通过订阅原始数据和校准参数,对数据滤波并更正,然后再发布出去,通过ecl模块订阅并融合发布成具体姿态数据
具体流程可以参考如下:

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 1
1 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)