无人驾驶-----多传感器数据融合之环境感知传感器(激光雷达lidar、毫米波雷达radar、相机)
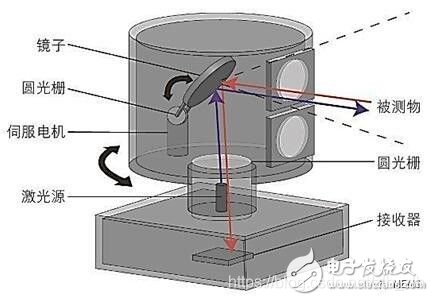
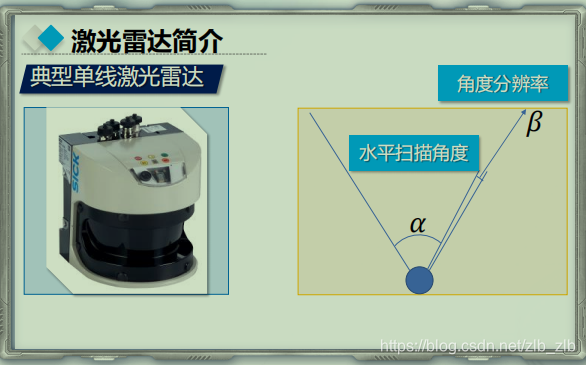
激光雷达在用眼安全的波长范围内,当在地形测绘和避障中探测固体时,通常需要约红外激光器发射1.5 µm的波长毫米波雷达的波长范围一般在1-10mm范围内,因为灰尘烟雾的颗粒大小处于激光波长和毫米波波长之间,所以在面对灰尘烟雾的时候毫米波有较好的穿透效果,而激光无法穿透,会将其识别为障碍物。激光雷达精度高,但造价昂贵、复杂天气不适用。激光雷达水平扫描角度决定...
激光雷达在用眼安全的波长范围内,当在地形测绘和避障中探测固体时,通常需要约红外激光器发射1.5 µm的波长
可见光的波长范围为400~780nm,目前市场上三维成像激光雷达最常用的波长是905nm和1550 nm,由于905nm的波长接近人眼感知范围,所以不能以太高功率运行,否则容易伤眼。1550nm波长LiDAR传感器可以以更高的功率运行,以提高探测范围,同时对于雨雾的穿透力更强(波长越长穿透力越强)。905nm的主要优点是硅在该波长处吸收光子,而硅基光电探测器通常比探测1550 nm光所需的铟镓砷(InGaAs)近红外探测器便宜(激光雷达性能指标)
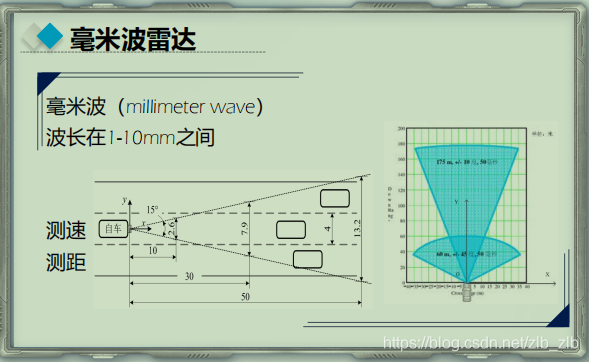
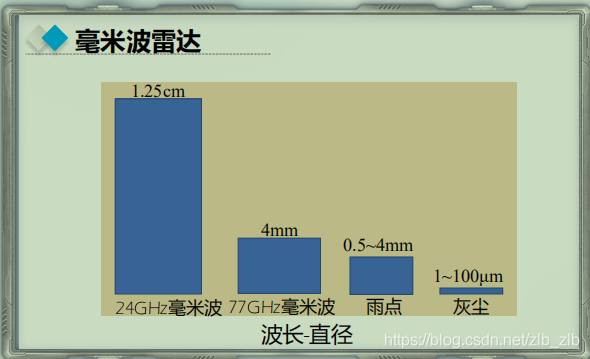
毫米波雷达的波长范围一般在1-10mm范围内,因为灰尘烟雾的颗粒大小处于激光波长和毫米波波长之间,所以在面对灰尘烟雾的时候毫米波有较好的穿透效果,而激光无法穿透,会将其识别为障碍物。
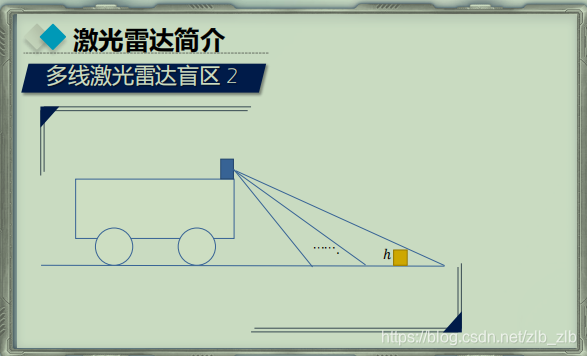
激光雷达精度高,但造价昂贵、复杂天气不适用。


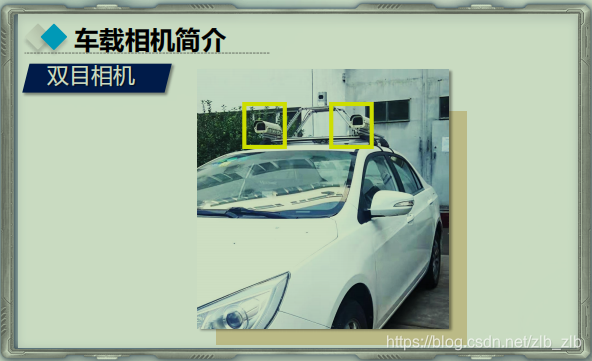
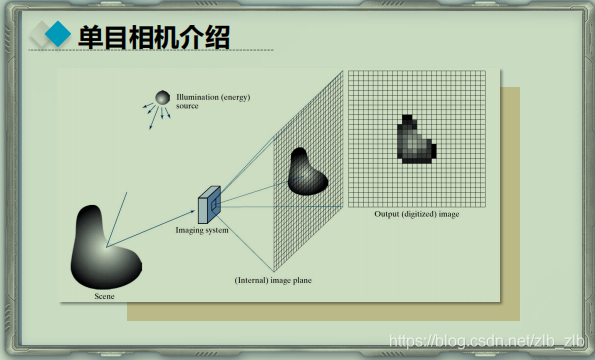
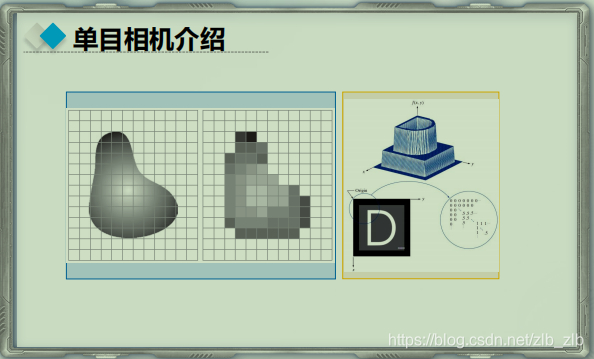
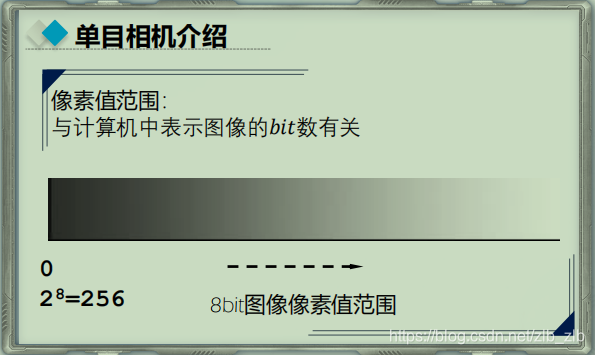
相机,计算机视觉方面




魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 0
0 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)