slam特征点深度 svd_pySLAM:多深度学习特征集成SLAM
简介 今天推荐一个有趣的项目pySLAM,该用项目用python实现SLAM、VO、关键帧、BA、特征匹配等功能。最重要的是该项目集成了多种近几年主流的深度学习特征点+描述子,该项目可以比较轻松的利用现有的深度学习特征测试SLAM/VO的性能。感兴趣的同学可以尝试下这个项目,关注本号后台回复pyslam查看源代码,另外博客地址[1]目前已支持下述特征检测器:FAST[2]Good fea...
简介
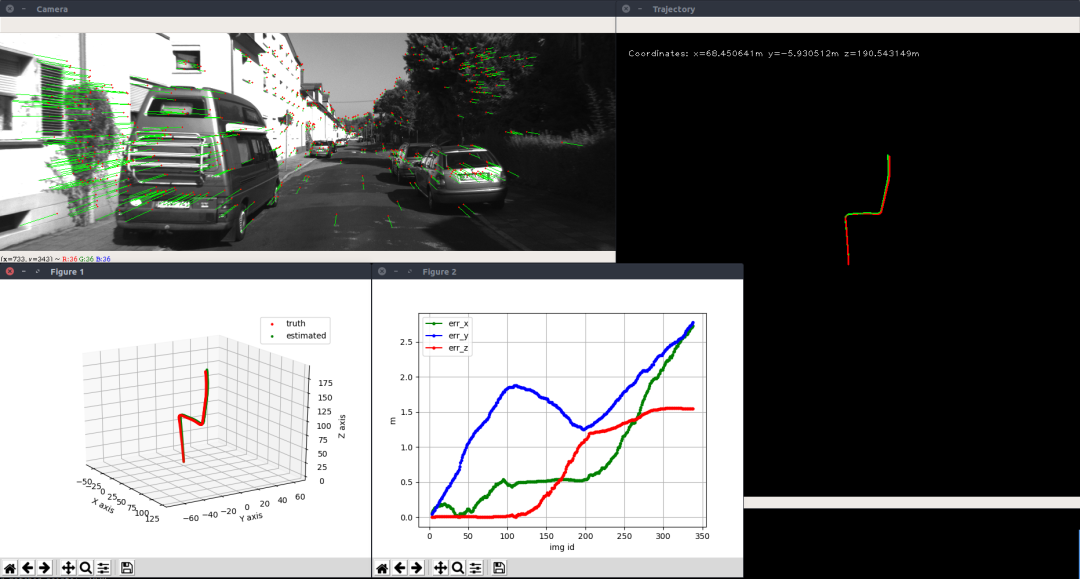
今天推荐一个有趣的项目pySLAM,该用项目用python实现SLAM、VO、关键帧、BA、特征匹配等功能。
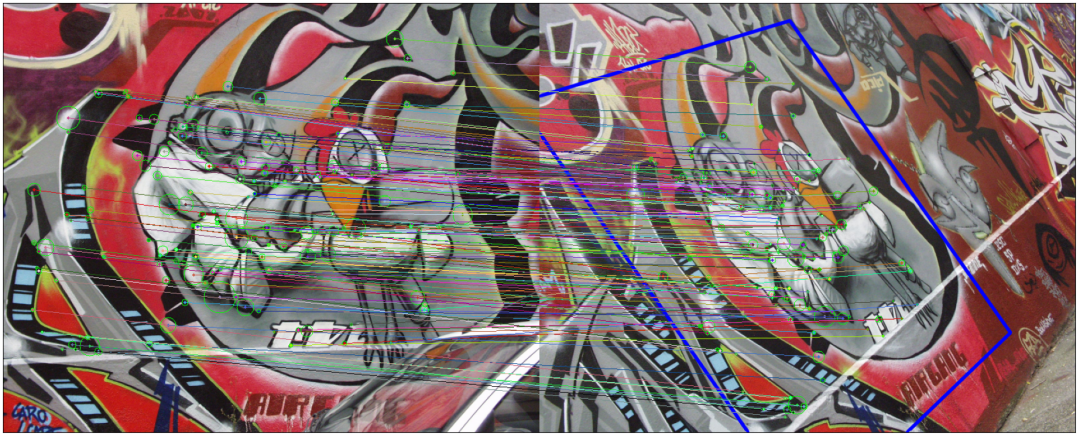
最重要的是该项目集成了多种近几年主流的深度学习特征点+描述子,该项目可以比较轻松的利用现有的深度学习特征测试SLAM/VO的性能。
感兴趣的同学可以尝试下这个项目,关注本号后台回复pyslam查看源代码,另外博客地址[1]
目前已支持下述特征检测器:
- FAST[2]
- Good features to track[3]
- ORB[4]
- ORB2[5] (improvements of ORB-SLAM2 to ORB detector)
- SIFT[6]
- SURF[7]
- KAZE[8]
- AKAZE[9]
- BRISK[10]
- AGAST[11]
- MSER[12]
- StarDector/CenSurE[13]
- Harris-Laplace[14]
- SuperPoint[15]
- D2-Net[16]
- DELF[17]
- Contextdesc[18]
- LFNet[19]
- R2D2[20]
- Key.Net[21]
已支持下述特征描述子:
- ORB[22]
- SIFT[23]
- ROOT SIFT[24]
- SURF[25]
- AKAZE[26]
- BRISK[27]
- FREAK[28]
- SuperPoint[29]
- Tfeat[30]
- BOOST_DESC[31]
- DAISY[32]
- LATCH[33]
- LUCID[34]
- VGG[35]
- Hardnet[36]
- GeoDesc[37]
- SOSNet[38]
- L2Net[39]
- Log-polar descriptor[40]
- D2-Net[41]
- DELF[42]
- Contextdesc[43]
- LFNet[44]
- R2D2[45]
关于作者
本项目的作者是Luigi Freda,于2007年在罗马大学获得计算机系统工程博士学位,目前是一名自由职业者,目前从事计算机视觉、机器人和机器学习。

参考资料
[1]博客地址: https://www.luigifreda.com/2020/05/07/my-new-pyslam-v2-is-out/
[2]FAST: https://www.edwardrosten.com/work/fast.html
[3]Good features to track: https://ieeexplore.ieee.org/document/323794
[4]ORB: http://www.willowgarage.com/sites/default/files/orb_final.pdf
[5]ORB2: https://github.com/raulmur/ORB_SLAM2
[6]SIFT: https://www.cs.ubc.ca/~lowe/papers/iccv99.pdf
[7]SURF: http://people.ee.ethz.ch/~surf/eccv06.pdf
[8]KAZE: https://www.doc.ic.ac.uk/~ajd/Publications/alcantarilla_etal_eccv2012.pdf
[9]AKAZE: http://www.bmva.org/bmvc/2013/Papers/paper0013/paper0013.pdf
[10]BRISK: http://www.margaritachli.com/papers/ICCV2011paper.pdf
[11]AGAST: http://www.i6.in.tum.de/Main/ResearchAgast
[12]MSER: http://cmp.felk.cvut.cz/~matas/papers/matas-bmvc02.pdf
[13]StarDector/CenSurE: https://link.springer.com/content/pdf/10.1007%2F978-3-540-88693-8_8.pdf
[14]Harris-Laplace: https://www.robots.ox.ac.uk/~vgg/research/affine/det_eval_files/mikolajczyk_ijcv2004.pdf
[15]SuperPoint: https://github.com/MagicLeapResearch/SuperPointPretrainedNetwork
[16]D2-Net: https://github.com/mihaidusmanu/d2-net
[17]DELF: https://github.com/tensorflow/models/blob/master/research/delf/INSTALL_INSTRUCTIONS.md
[18]Contextdesc: https://github.com/lzx551402/contextdesc
[19]LFNet: https://github.com/vcg-uvic/lf-net-release
[20]R2D2: https://github.com/naver/r2d2
[21]Key.Net: https://github.com/axelBarroso/Key.Net
[22]ORB: http://www.willowgarage.com/sites/default/files/orb_final.pdf
[23]SIFT: https://www.cs.ubc.ca/~lowe/papers/iccv99.pdf
[24]ROOT SIFT: https://www.robots.ox.ac.uk/~vgg/publications/2012/Arandjelovic12/arandjelovic12.pdf
[25]SURF: http://people.ee.ethz.ch/~surf/eccv06.pdf
[26]AKAZE: http://www.bmva.org/bmvc/2013/Papers/paper0013/paper0013.pdf
[27]BRISK: http://www.margaritachli.com/papers/ICCV2011paper.pdf
[28]FREAK: https://www.researchgate.net/publication/258848394_FREAK_Fast_retina_keypoint
[29]SuperPoint: https://github.com/MagicLeapResearch/SuperPointPretrainedNetwork
[30]Tfeat: https://github.com/vbalnt/tfeat
[31]BOOST_DESC: https://www.labri.fr/perso/vlepetit/pubs/trzcinski_pami15.pdf
[32]DAISY: https://ieeexplore.ieee.org/document/4815264
[33]LATCH: https://arxiv.org/abs/1501.03719
[34]LUCID: https://pdfs.semanticscholar.org/85bd/560cdcbd4f3c24a43678284f485eb2d712d7.pdf
[35]VGG: https://www.robots.ox.ac.uk/~vedaldi/assets/pubs/simonyan14learning.pdf
[36]Hardnet: https://github.com/DagnyT/hardnet.git
[37]GeoDesc: https://github.com/lzx551402/geodesc.git
[38]SOSNet: https://github.com/yuruntian/SOSNet.git
[39]L2Net: https://github.com/yuruntian/L2-Net
[40]Log-polar descriptor: https://github.com/DagnyT/hardnet_ptn.git
[41]D2-Net: https://github.com/mihaidusmanu/d2-net
[42]DELF: https://github.com/tensorflow/models/blob/master/research/delf/INSTALL_INSTRUCTIONS.md
[43]Contextdesc: https://github.com/lzx551402/contextdesc
[44]LFNet: https://github.com/vcg-uvic/lf-net-release
[45]R2D2: https://github.com/naver/r2d2
往期推荐
开源:CVPR 2020视觉定位挑战赛第二名方案Kapture
2020-11-07
深度血轮眼:识别《火影忍者》结印手势
2020-11-01
CVPR 2020 SLAM挑战赛冠军方案
2020-10-31

SkyAR 天空之城:实时替换天空
2020-10-27
开源: CVPR 2020 修复你的老照片
2020-10-26
CVPR 2020 视觉定位挑战赛冠军方案
2020-10-25

三维重建系列之COLMAP: Structure-from-Motion Revisited
2020-10-24



魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 0
0 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)