多传感器融合(二)--- 杆臂
杆臂就是各个传感器之间的相对位置关系,在多传感器融合的时候,每个传感器的位置计算都是相对于自己的,把他们统一做滤波的时候,需要有一个统一的坐标系,就是要补偿这个距离。以gps和ins组合为例,如果不补偿,位置观测就是有误差的,会把估计量带偏。
·
1 杆臂介绍
杆臂就是各个传感器之间的相对位置关系,在多传感器融合的时候,每个传感器的位置计算都是相对于自己的,把他们统一做滤波的时候,需要有一个统一的坐标系,就是要补偿这个距离。 以gps和ins组合为例,如果不补偿,位置观测就是有误差的,会把估计量带偏。 杆臂效应常见于惯导和其他导航系统的组合中,以惯导和GNSS为例,就是惯导系统安装位置和GNSS天线不重合,GNSS输出的观测值是天线相位中心的位置速度 (如果是松组合,GNSS导航结果应该会归算到接收机的安装位置),惯导的结果就是惯导系统安装的位置,那么组合时就会出现误差。
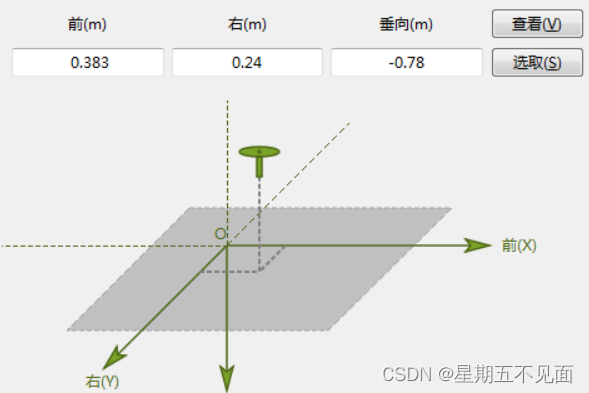
2 测量方法
就是根据某一个传感器的坐标为原点,在该坐标系下,计算其他传感器的相对位置(x轴、y轴、z轴)。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 2
2 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)