K-Radar数据集的下载与使用
针对K-radar数据集太大,没有办法完全下载进行了说明,如果是做关于Radar目标检测方向的话可以参考。

论文地址:[2206.08171] K-Radar: 4D Radar Object Detection for Autonomous Driving in Various Weather Conditions
下载地址:GitHub - kaist-avelab/K-Radar:用于各种天气条件下自动驾驶的 4D 雷达物体检测
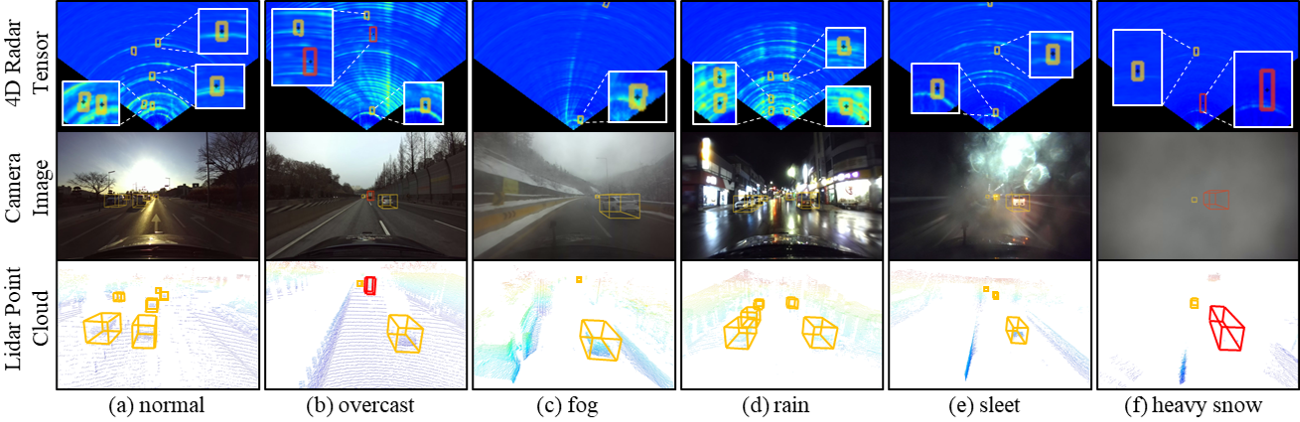
简介:K-Radar 数据集是由韩国延世大学 Intelligent Vehicle Lab 发布的一个大规模车载毫米波雷达感知数据集,旨在推动自动驾驶场景下的三维感知与多模态融合研究。该数据集利用 4D 成像雷达(毫米波雷达,具备距离、方位角、俯仰角和径向速度信息),同步采集了点云、RGB 图像以及车辆自车位姿信息,覆盖城市道路、高速公路、隧道等多样化驾驶场景。
与传统的 3D 激光雷达数据集相比,K-Radar 更关注雷达数据在恶劣天气(如雨、雾、雪)及低光照环境下的鲁棒性,能够有效弥补激光雷达和相机的不足。其标注内容包括三维目标检测框、语义分割标签以及多模态同步信息,支持多种感知任务的研究。
下载问题解决:
提供了三种方式进行下载(总计 16TB):
- 通过我们的本地服务器访问整个数据集
- 通过 Google Drive 获取部分数据集
- 通过出厂的 HDD(硬盘驱动器)的数据集总数
其中遇到的最大的问题就是16TB太难下载了,速度慢且可能中途会断。
解决办法:
对于做Radar目标检测的研究者们,可以只下载官方处理后的Sparse 4D Point Cloud
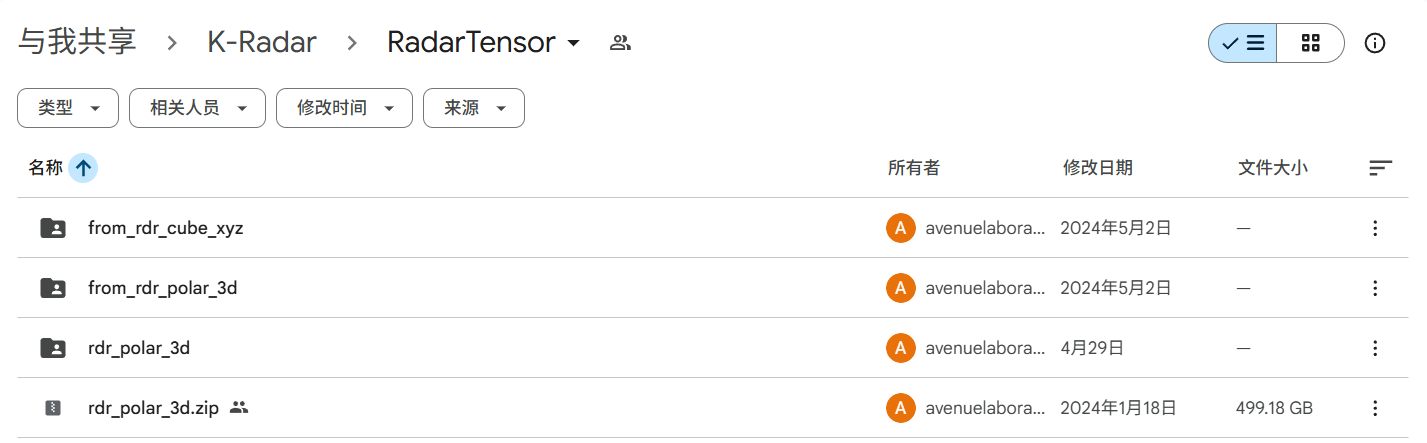
K-Radar数据集很大的主要原因是因为4D Radar Tensor太密集了,单帧数据就有200+G。
【4Dradar】:从谷歌网盘下载稀疏4Dradar,对应现版本中的RadarTensor
【LiDAR及其他标定文件】:1~58文件夹中的lpc及meta(有需要也可以下载cam)

【标签】:我们使用的是作者建议的 'kradar_revised_label_v2_0.zip'而不是1~58中的meta文件(下载链接:KRadar_refined_label_by_UWIPL.zip - Google 云端硬盘)。
下载完后就解压并按如下方式排列:
├── sequence_number (i.e., 1, 2, ..., 58)
├── cam_front
├── cam_left
├── cam_rear
├── cam_right
├── description.txt
├── info_calib
├── info_label
├── os1-128
├── os2-64
├── radar_zyx_cube
剩下的按照官方文档进行操作即可,最主要的是下载处理后的Radar文件。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 8
8 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)