全局路径规划:图搜索算法介绍3(A stars tie breaker)
本文课件来自香港科技大学,我的母校,感谢ELEC
本节介绍A算法中的打破路径对称性的几种方法,在工程实践中有一定的参考意义。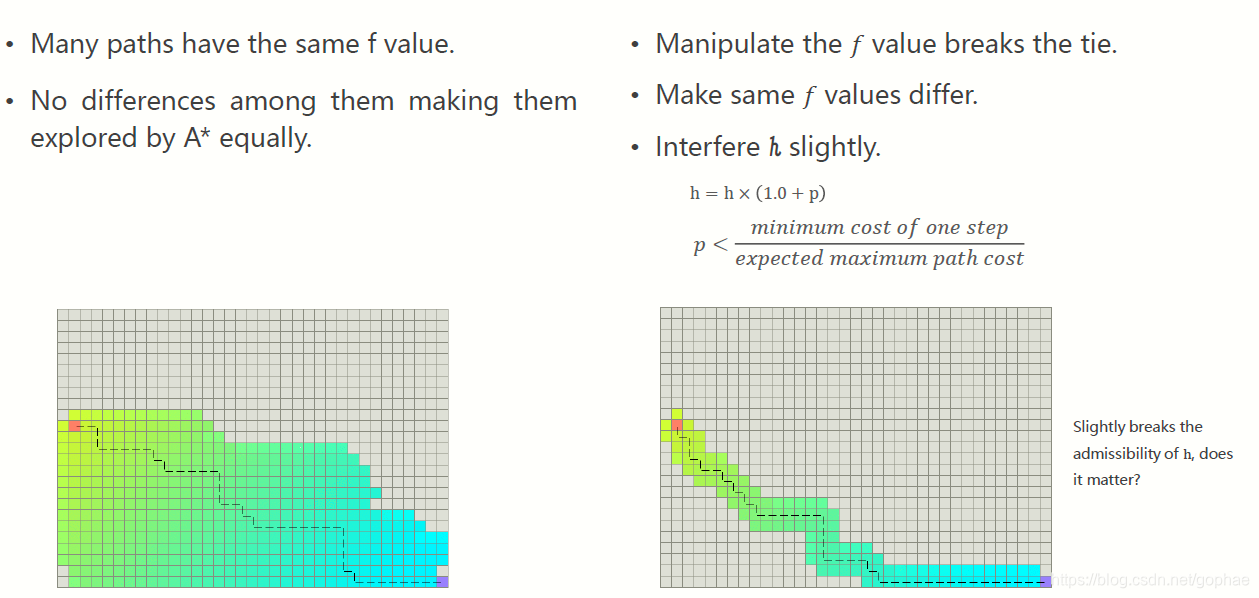
根据上图,我们举一个简单的例子,可以看到,同样的A算法,我们在采用了不用的h启发函数后,搜索的效率是不同的,第二个A*中,我们对h进行了一定的放大,发现搜索区域缩减了很多,搜索效率提高。
值得注意的是,虽然我们的启发函数已经不符合我们之前讲的要求:h<=h*, 但是,工程中,由于障碍物的存在,这个真实的h是远大于h*的,所以对h稍作放大完全不会有太大印象。另一个重点是启发式函数的选择,尽量要和真实的h cost 相近,比如下图: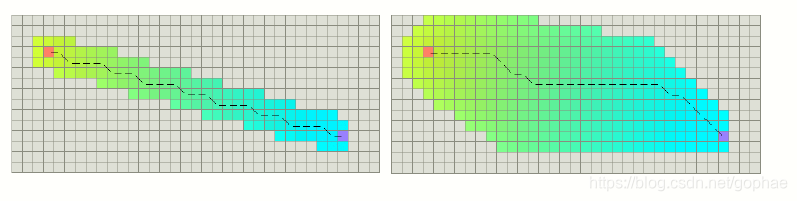
前一个图我们采用了对角距离,也就是下图的距离计算方法: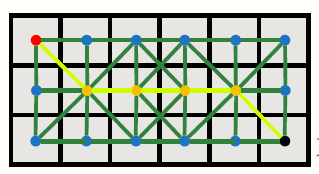
来作为启发式函数,而不是用L2 norm来作为启发式函数,显然,对角距离更符合这个情况中的真实距离的表达方式,因此计算效率更高。
另外,还有两个常用的方法,第一,当cost function相同时,我们还可以选择h较小的那个最为优先选项。 第二,我们引入一个cross最为cost function 中的一部分,意思是我们更加倾向于走直线,而不是走折线。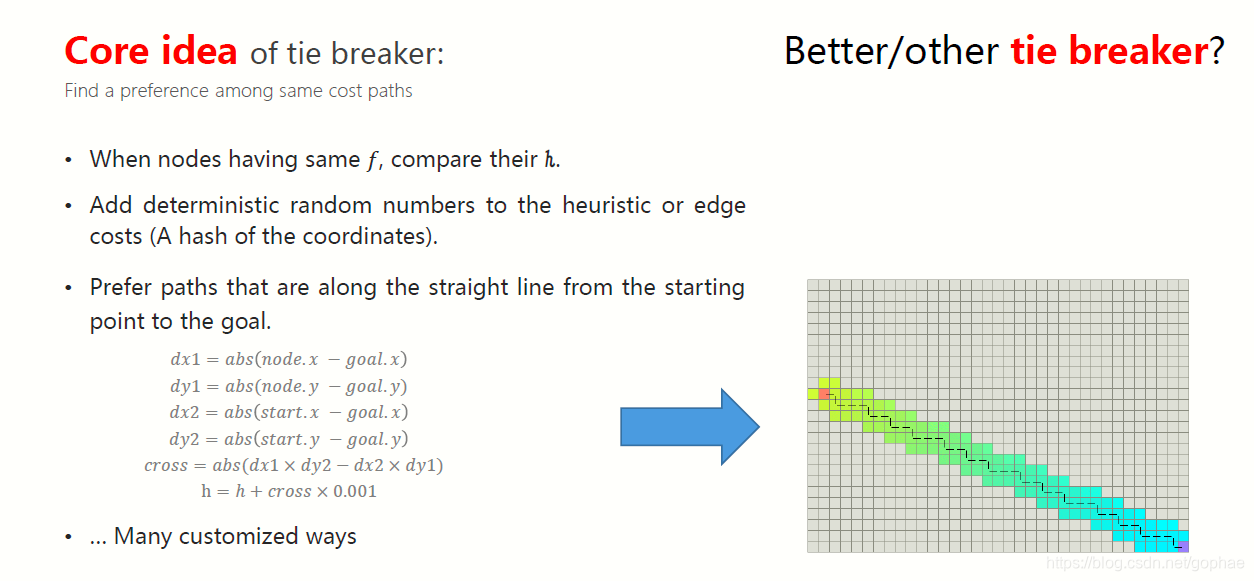
如图所示,这里的cost function 就变成了
h=ℎ+𝑐𝑟𝑜𝑠𝑠×0.001
当然,tie breaker 也是有缺点的,打破了路径对称性后,比如做一个绕障的行为,我们的期望轨迹可能是: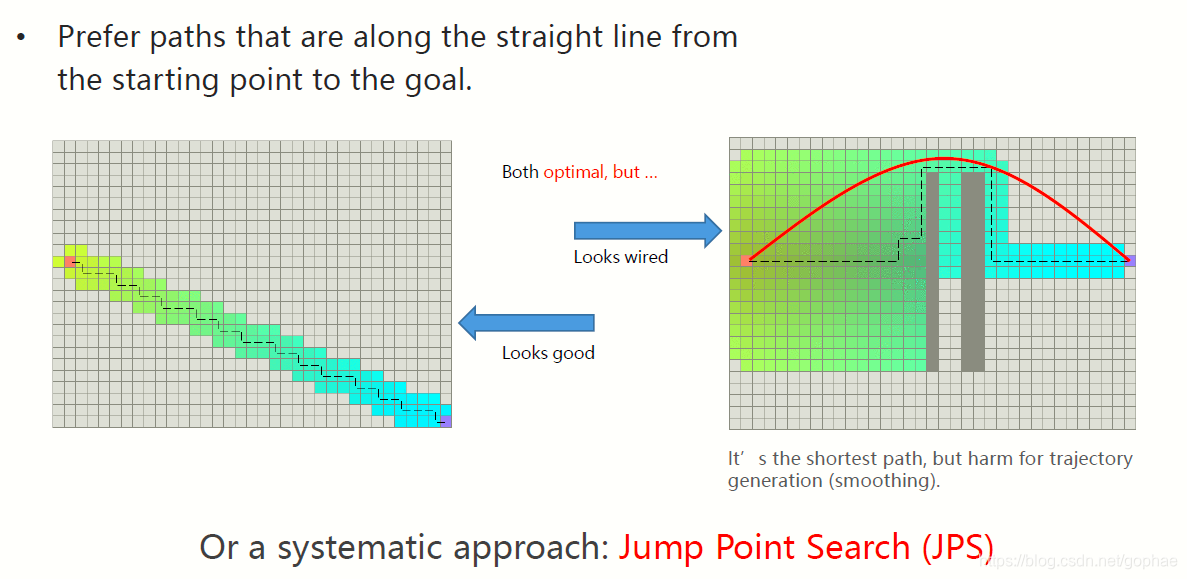
显然,我们的期望轨迹是很难实现的,我们希望它和红色的轨迹尽量相似,做平滑处理的时候才更加方便,所以tie breaker也给我们带来了一些麻烦,这时候有一个高阶的图搜索算法JPS跳点搜索可以解决这个问题。详见全局路径规划:图搜索算法介绍4(JPS)

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 3
3 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)