matlab处理多光谱,多光谱数据处理教程
多光谱影像处理案例
功能说明
LiMapper支持单架次多光谱影像处理,广泛应用于地质灾害监测、测绘调查、林业分析及环境保护等领域。多个波段能够同时处理,且支持用户自定义选择多个波段进行合并导出。
处理流程
1. 工程准备
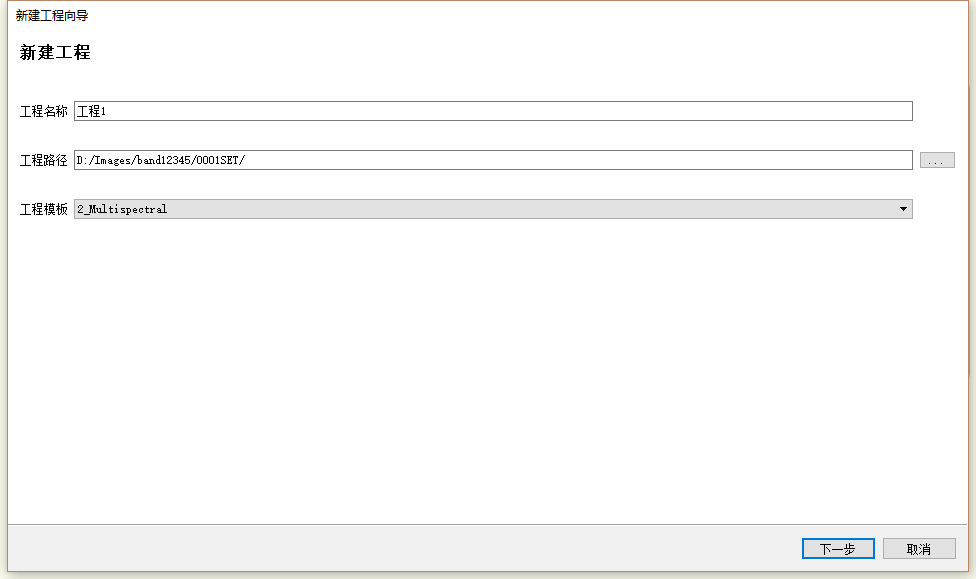
(1) 新建工程
在新建工程向导中输入工程名称和工程路径;
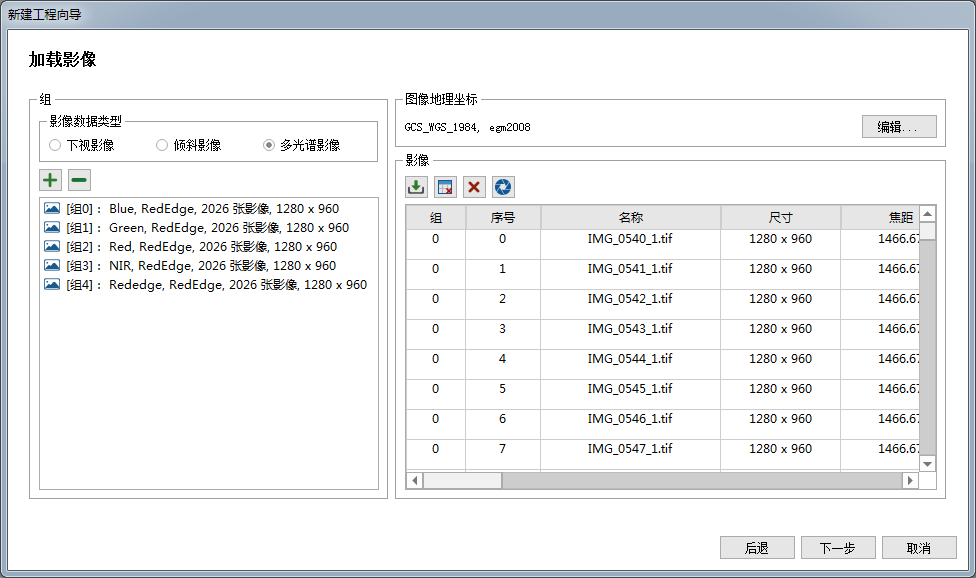
(2) 加载数据(单架次)
设置数据类型为多光谱,同一波段的影像需要作为一个影像组进行导入。请参考影像编辑。
注:同一影像组内影像不能重名;多光谱影像不推荐多个架次同时处理;为保证拼图质量,至少加载4条航带影像
(3) 导入POS(可选)
若影像无EXIF位置信息,可导入TXT或者CSV类型的POS文件。请参考导入POS。
在没有地理参考坐标系统的情况下,产生的成果坐标系为局部坐标系。
注:原则上无需分波段导入POS, 因为大部分情况各波段POS一致;若用户各波段POS文件独立,也支持分波段导入。
(4) 设置主波段(可选)
多光谱影像导入后,用户可以依据导入数据的类型选择合适的波段作为主波段。请参考设置主波段。
2. 工程处理
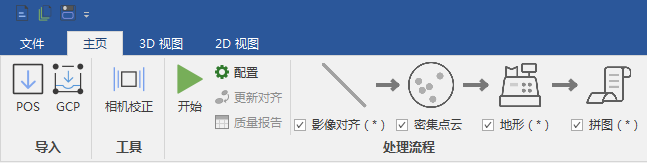
(1) 拼接影像
在处理流程界面,可选择需要运行的步骤。点击"配置"按钮可对模板参数进行调整。
注:密集点云的类型参数仅在创建模板时可编辑!
3. 成果导出
(1) 导出点云
可导出稀疏点云和密集点云,支持的类型有PLY ,LAS 及OBJ文件。此外密集点云还可导出为OSGB类型。请参考导出点云。
(2) 导出DEM/DSM
DEM/DSM导出支持坐标系、压缩类型及分辨率设置。请参考导出DEM/DSM。
(3) 导出DOM/TDOM
DOM/TDOM导出支持坐标系、压缩类型及分辨率设置。用户可自定义多个波段进行融合及导出。请参考导出DOM/TDOM。
(4) 导出其他成果
示例数据
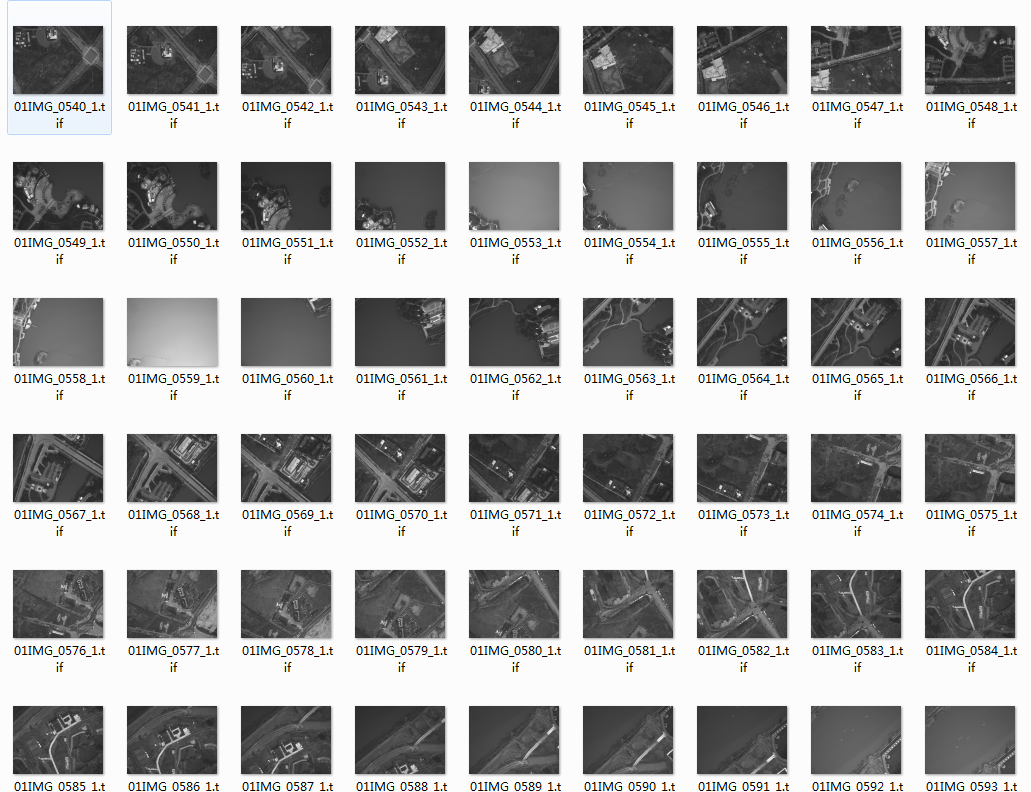
本案例数据源为RedEdge多光谱相机采集的镇江数据,影像尺寸为1280*960,5个波段,每个波段2200张,影像数目共11000张。
源数据
源数据示例
密集点云
密集点云按照高程进行显示,显示软件为LiDAR360。

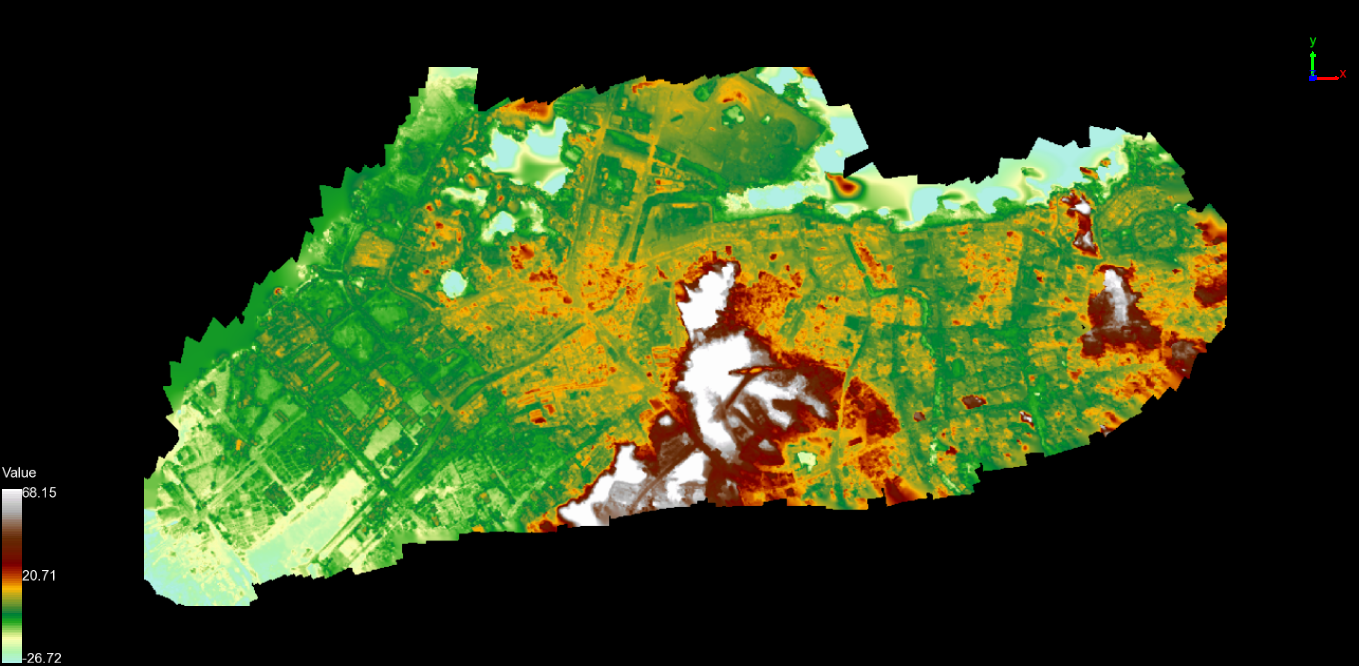
DEM
DEM按高程显示,显示软件为LiDAR360。
DOM
成果为4、3、2波段合成的伪彩色影像。


魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 0
0 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)