四模型IMM,matlab代码|CV(匀速)、CA(匀加速)、CT(匀速转弯)、CS(当前统计)
该 MATLAB 代码实现了交互式多模型(IMM)算法,用于对动态目标进行状态估计。该算法结合了多种运动模型,包括匀速(Constant Velocity, CV)、匀速转向(Constant Turn, CT)、匀加速(Constant Acceleration, CA)和当前统计模型(Current Statistical, CS),以提高对目标运动的准确估计。当前统计模型具有自适应机动加速度
·

如需帮助,或有导航、定位滤波相关的代码定制需求,请点击文末卡片联系作者
代码概述
该 MATLAB 代码实现了交互式多模型(IMM)算法,用于对动态目标进行状态估计。该算法结合了多种运动模型,包括匀速(Constant Velocity, CV)、匀速转向(Constant Turn, CT)、匀加速(Constant Acceleration, CA)和当前统计模型(Current Statistical, CS),以提高对目标运动的准确估计。当前统计模型具有自适应机动加速度的能力,能够在目标行为变化时及时调整。
主要功能模块
-
参数设置:
- 时间设置:
dt:时间步长(1秒)。T:总时间步数(60秒)。t:生成的时间序列。
- 模型转移概率矩阵:定义了模型转换的概率,表示在不同状态之间的转移可能性。
- 初始模型概率:设置初始状态下各模型的概率分布。
- 过程噪声与测量噪声:
- 过程噪声协方差矩阵(Q)和测量噪声协方差矩阵(R)用于描述模型的不确定性。
- 时间设置:
-
复杂轨迹生成:
- 通过条件判断生成包含强机动段的真实轨迹。目标在不同时间段表现出不同的运动模式:
- 匀速运动:前20秒,目标以固定速度移动。
- 左转运动:20秒到60秒,目标进行圆周运动。
- 匀加速运动:60秒到90秒,目标以加速度移动。
- 强机动:90秒后,目标表现出动态变化的加速度,模拟真实场景中的机动行为。
- 通过条件判断生成包含强机动段的真实轨迹。目标在不同时间段表现出不同的运动模式:
-
IMM初始化:
- 初始化各模型的状态向量(位置、速度、加速度)和协方差矩阵,以便在后续估计中使用。每种模型都有不同的状态维度:
- CV模型:4维状态(x, y, vx, vy)。
- CT模型:5维状态(x, y, vx, vy, ω)。
- CA模型:6维状态(x, y, vx, vy, ax, ay)。
- CS模型:6维状态(x, y, vx, vy, ax, ay)。
- 初始化各模型的状态向量(位置、速度、加速度)和协方差矩阵,以便在后续估计中使用。每种模型都有不同的状态维度:
-
主循环:
- 在每个时间步中执行以下步骤:
- 模型交互:根据当前概率和转移概率对状态进行混合,得到每个模型的混合状态。
- 模型滤波:对每个模型应用滤波算法,更新状态和协方差矩阵。滤波过程基于当前的观测数据。
- 模型概率更新:根据观测值与预测值之间的残差,更新每个模型的概率,确保模型能够适应目标的运动变化。
- 状态融合:通过加权平均融合各模型的状态估计,得到最终的状态估计。融合的权重由模型的概率决定。
- 在每个时间步中执行以下步骤:
-
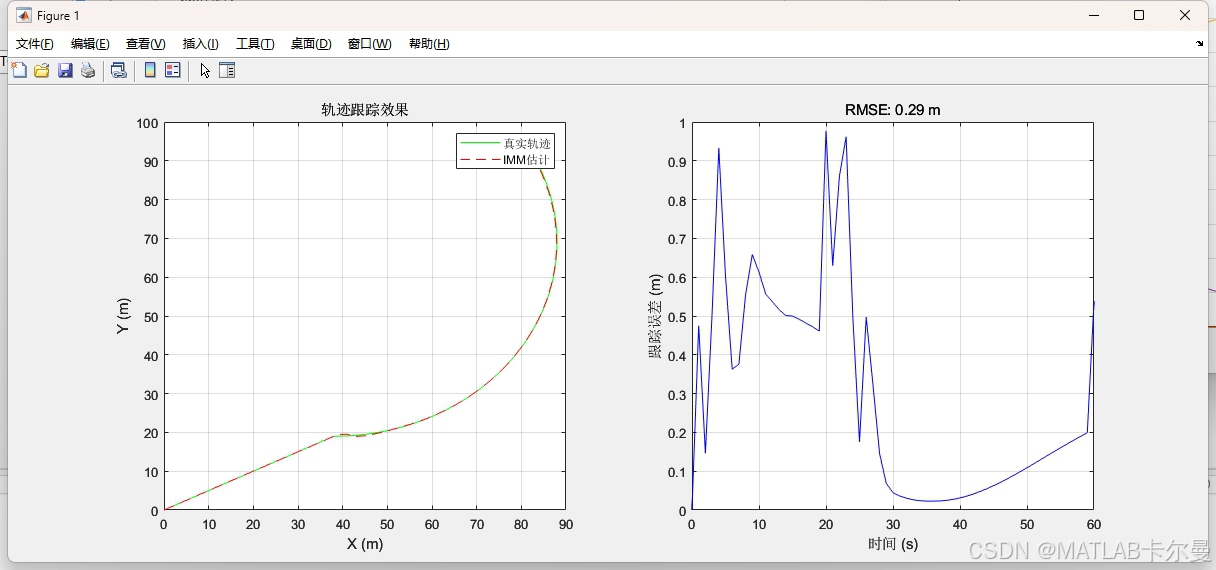
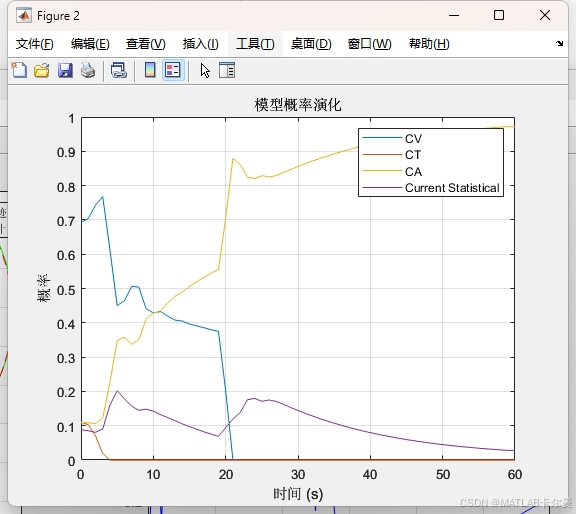
误差分析与可视化:
- 计算真实轨迹与估计轨迹之间的误差,并绘制跟踪效果图。
- 可视化模型概率的演化,展示不同模型在整个跟踪过程中的表现。
代码细节
-
动态轨迹生成:
- 目标轨迹的生成逻辑使用条件判断,根据时间段变化生成不同运动模式的轨迹,模拟真实场景中的目标移动。
-
自适应过程噪声:
- 当前统计模型的过程噪声协方差矩阵动态计算,基于当前加速度的估计值调整噪声强度,以提高对机动行为的适应性。
-
滤波函数:
- 每种运动模型都有对应的滤波函数,分别实现了状态的预测和更新,确保不同模型之间的协同工作。
- 主要滤波函数包括 CV_Filter、CT_Filter、CA_Filter 和 CurrentStatistical_Filter,每个函数根据模型的状态转移矩阵更新状态和协方差。
-
模型概率更新:
- 使用多元高斯分布计算似然函数,并根据观测更新模型的概率,确保了估计的准确性。更新过程基于贝叶斯定理,结合模型的先验概率和观测数据进行更新。
适用场景
本代码适用于需要对动态目标进行精确跟踪的场景,如:
- 无人机、导弹等动态物体的路径预测:在军事和民用领域,通过对目标运动的实时跟踪,提高作战和监控能力。
- 交通监控与管理系统:对车辆状态的估计,为交通管理提供数据支持,帮助实现智能交通系统。
- 机器人导航与定位:在复杂环境下,使用多模型方法提高机器人的定位精度和环境适应能力。
源代码
部分代码如下:
%% IMM算法例程(CV/CT/CA/当前统计模型)
% 代码作者:matlabfilter
% 模型:匀速(CV)、匀速转向(CT)、匀加速(CA)、当前统计(CS)
% 特点:当前统计模型可自适应调整机动加速度
clear; clc; close all;
%% 参数设置
dt = 1; % 时间步长
T = 60; % 总时间步数
t = 0:dt:T; % 时间序列
% 模型转移概率矩阵(CV, CT, CA, Current Statistical)
P = [0.85, 0.05, 0.05, 0.05;
0.05, 0.80, 0.10, 0.05;
0.05, 0.10, 0.80, 0.05;
0.05, 0.05, 0.05, 0.85];
% 模型初始概率
mu = [0.7; 0.1; 0.1; 0.1];
% 当前统计模型参数
alpha = 1/100; % 机动频率倒数(相关时间20s)
sigma_a = 0.0001; % 加速度噪声标准差
% 过程噪声协方差
Q_CV = 0.01*diag([0.1, 0.1, 0.1, 0.1]); % CV 4×4
Q_CT = 0.01*diag([0.1, 0.1, 0.1, 0.1, 0.01]); % CT 5×5
Q_CA = 0.01*diag([0.1, 0.1, 0.1, 0.1, 0.1, 0.1]);% CA 6×6
Q_CS = @(a_hat) calc_CS_Q(alpha, sigma_a, dt, a_hat); % 当前统计模型动态Q
% 测量噪声协方差
R = diag([1, 1]);
运行结果
程序结构: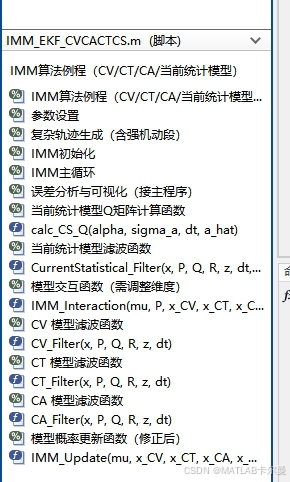
完整代码

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 34
34 0
0- 0



 已为社区贡献16条内容
已为社区贡献16条内容

所有评论(0)