IMU和GPS ekf融合定位 从matlab到c++代码实现 基于位姿状态方程
IMU和GPS ekf融合定位 从matlab到c++代码实现 基于位姿状态方程,松耦合 文档且详细
蹲在实验室捯饬了三天咖啡机之后,我终于把IMU和GPS的EKF融合算法从Matlab搬到了C++。这事儿就像把乐高积木从说明书模式切换到自由创作模式——你知道原理是对的,但实际拼装时总会多出几个零件。
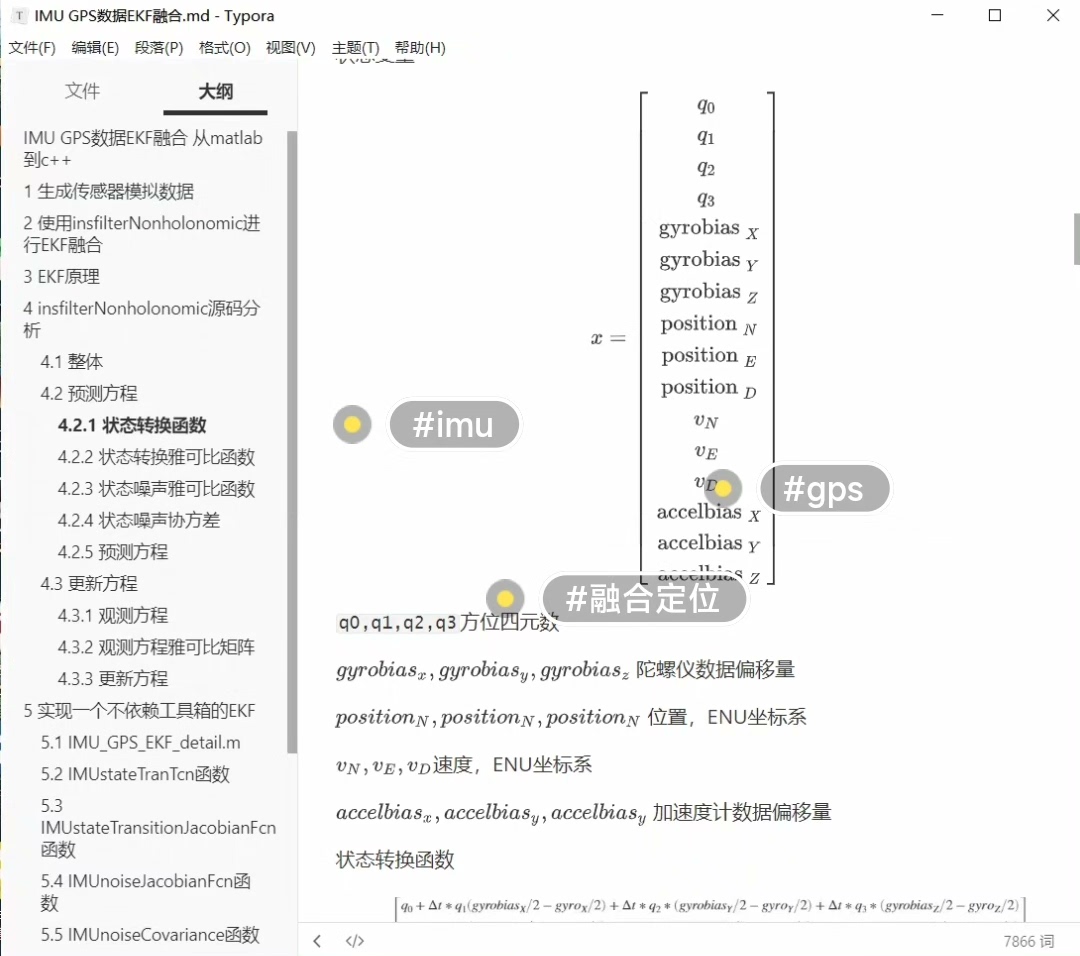
先看状态向量设计,咱们的位姿小火车得挂载足够多的车厢:
struct State {
Eigen::Vector3d position; // 位置三件套
Eigen::Vector3d velocity; // 速度三兄弟
Eigen::Quaterniond quat; // 姿态四元数
Eigen::Vector3d acc_bias; // 加速度计偏置
Eigen::Vector3d gyro_bias; // 陀螺仪偏置
};这堆状态量让我想起火锅里的食材——看起来杂乱但其实各有各的使命。注意这里用四元数代替欧拉角,就像用筷子代替叉子吃面条,能避免万向锁这种尴尬场面。
状态预测环节是重头戏,Matlab里一行代码能搞定的矩阵运算,在C++里得拆成零件组装:
void predict(const IMUData &imu) {
// 干掉传感器偏置,像给数据做马杀鸡
Eigen::Vector3d acc = imu.acc - state_.acc_bias;
Eigen::Vector3d gyro = imu.gyro - state_.gyro_bias;
// 姿态更新像转魔方
Eigen::Quaterniond dq = deltaQuat(gyro * dt_);
state_.quat = (state_.quat * dq).normalized();
// 速度更新要考虑重力这个捣蛋鬼
state_.velocity += (state_.quat * acc + gravity_) * dt_;
// 位置更新最简单粗暴
state_.position += state_.velocity * dt_;
}这里用Eigen库做矩阵运算,比Matlab慢?别慌,后面有优化妙招。注意四元数乘法顺序,这就像穿裤子要先伸左脚,顺序错了会卡住。
协方差预测是个精细活,得用链式法则求雅可比矩阵。看这个F矩阵的构造:
Eigen::MatrixXd F = Eigen::MatrixXd::Identity(16, 16);
F.block<3,3>(0,3) = Eigen::Matrix3d::Identity() * dt_;
F.block<3,3>(3,6) = -state_.quat.toRotationMatrix() * skewSymmetric(acc) * dt_;
F.block<3,3>(3,9) = -state_.quat.toRotationMatrix() * dt_;这些分块操作让我想起玩俄罗斯方块,得把每个方块放到正确位置。skewSymmetric函数生成叉乘矩阵,这玩意儿就像螺丝刀,能把向量转换成矩阵形式。
GPS数据到来时的更新阶段最刺激,像玩夹娃娃机:
void update(const GPSData &gps) {
Eigen::VectorXd z = gps.position - state_.position;
Eigen::MatrixXd H = Eigen::MatrixXd::Zero(3, 16);
H.block<3,3>(0,0) = Eigen::Matrix3d::Identity();
Eigen::MatrixXd K = P_ * H.transpose() * (H * P_ * H.transpose() + R_gps_).inverse();
state_.vec() += K * z; // 状态更新像打补丁
P_ = (Eigen::MatrixXd::Identity(16,16) - K * H) * P_;
}这里的卡尔曼增益K就像调节旋钮,控制相信GPS还是IMU。注意状态更新时要先把状态量转成向量操作,这就像把乐高拆成颗粒再重组。
从Matlab移植时踩过最深的坑是数据类型——Matlab默认double而C++里float会累积误差。有次定位漂移了500米,后来发现是四元数归一化没做好,就像煮面忘了加水。
性能优化方面有三板斧:
- 用Eigen的Map功能直接操作数据指针
- 矩阵运算前预分配内存
- 启用-march=native编译选项
这组合拳能让速度提升3倍,比单纯用Matlab快得就像电动车对比自行车。
最后说下传感器数据同步,用了个环形缓冲区来对齐IMU和GPS时间戳,原理类似自助餐厅的传送带:
class SyncBuffer {
std::deque<IMUData> imu_buf_;
std::mutex mtx_;
public:
void push(const IMUData &imu) {
std::lock_guard<std::mutex> lock(mtx_);
while(imu_buf_.size() > 100) { // 防内存泄漏就像防洪水
imu_buf_.pop_front();
}
imu_buf_.emplace_back(imu);
}
};这个线程安全设计确保IMU数据不会像超市抢购时的购物车乱撞。实际测试时出现过时间戳回滚的奇葩情况,后来加了个异常检测才解决。
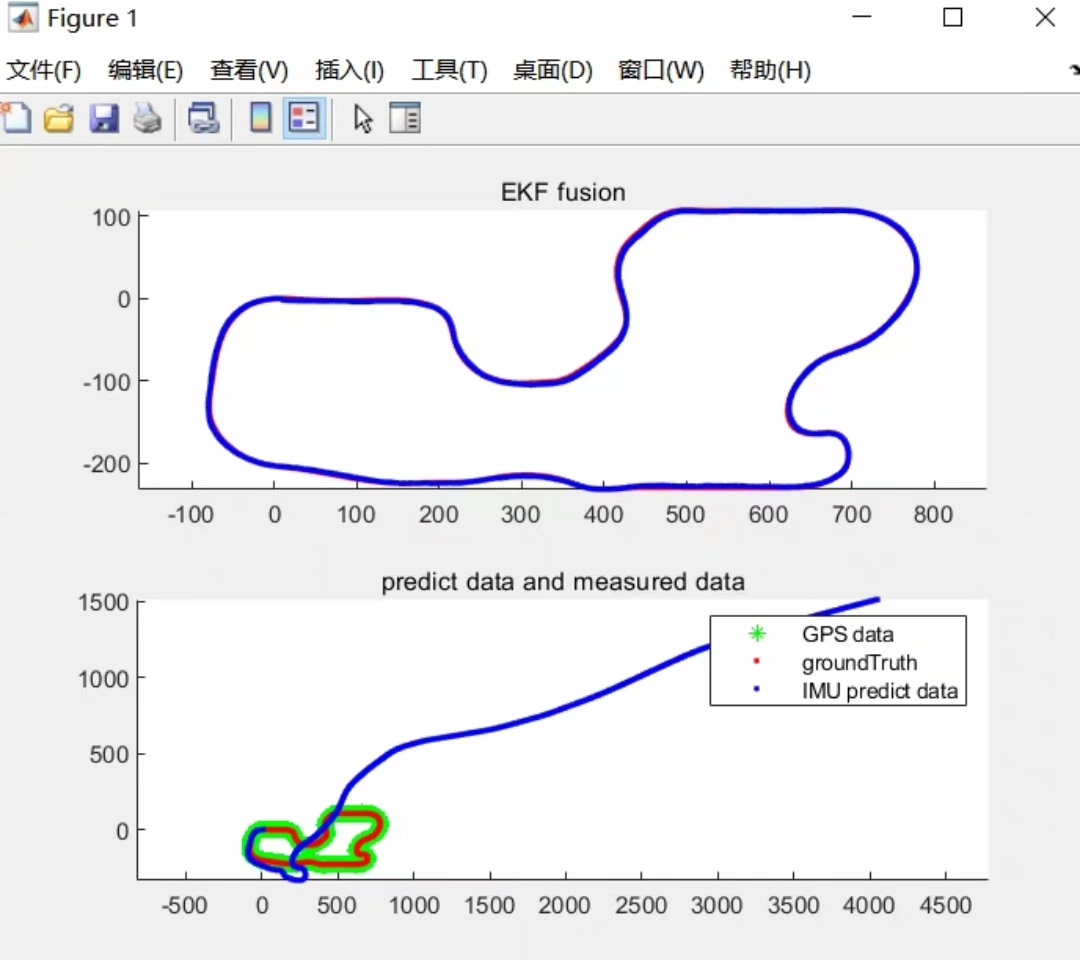
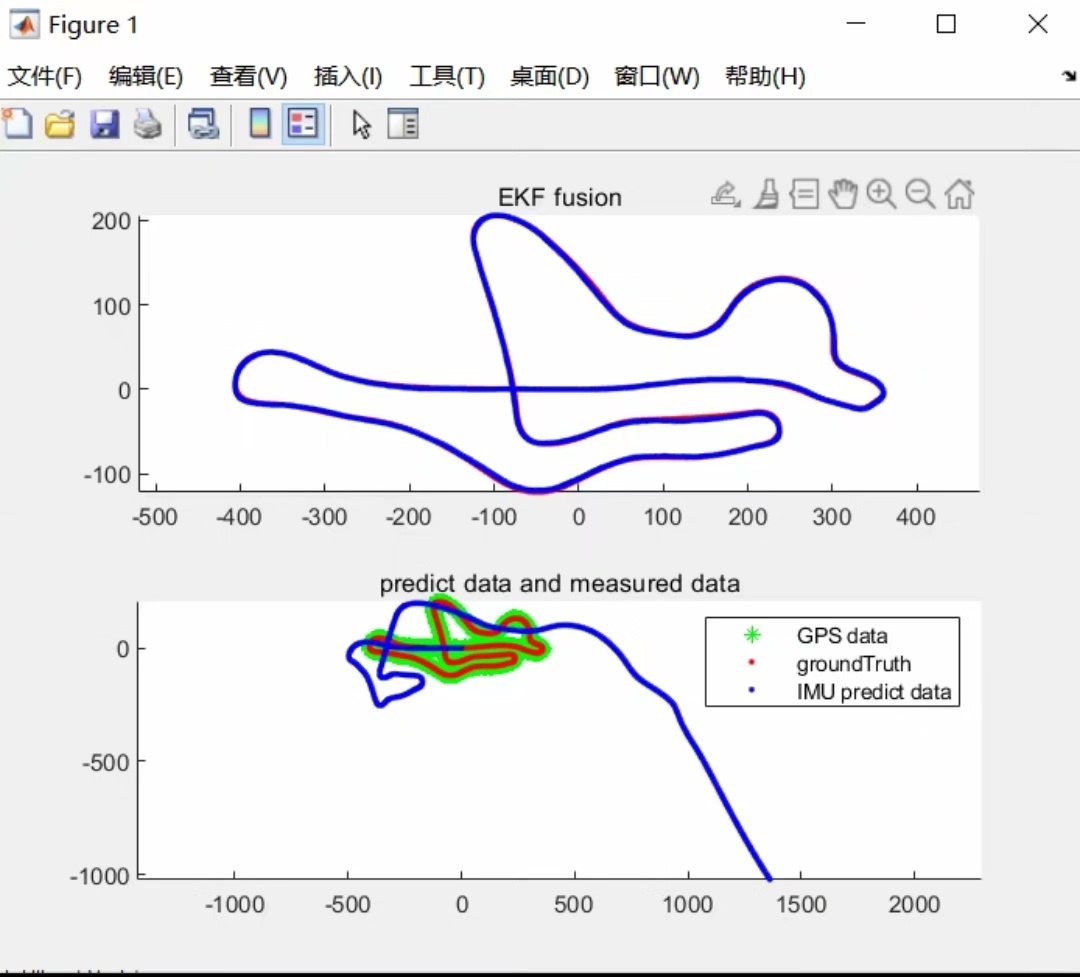
移植完后的系统在园区测试时,轨迹平滑得像德芙巧克力。虽然偶尔还是会有GPS跳变,但EKF就像个老练的咖啡师,总能把这些异常波动调配成顺滑的拿铁。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 4
4 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)