Carsim与Simulink联合仿真实现弯道变道:从路径规划到轨迹跟踪
carsim+simulink联合仿真实现变道 包含路径规划 carsim+simulink联合仿真实现变道包含路径规划算法+mpc轨迹跟踪算法可选simulink版本和c++版本算法(二选一)可以适用于弯道道路,弯道车道保持,弯道变道carsim内规划轨迹可视化(可赠送安装包)最近在研究车辆的智能驾驶相关内容,今天来分享一下如何用Carsim和Simulink联合仿真实现变道,而且这个过程还涵盖
carsim+simulink联合仿真实现变道 包含路径规划 carsim+simulink联合仿真实现变道 包含路径规划算法+mpc轨迹跟踪算法 可选simulink版本和c++版本算法(二选一) 可以适用于弯道道路,弯道车道保持,弯道变道 carsim内规划轨迹可视化 Carsim2020.0 Matlab2017b (可赠送安装包)
最近在研究车辆的智能驾驶相关内容,今天来分享一下如何用Carsim和Simulink联合仿真实现变道,而且这个过程还涵盖了路径规划以及MPC轨迹跟踪算法,并且适用于弯道场景哦,无论是弯道车道保持还是弯道变道都能搞定。另外,文中会给出Simulink版本的相关算法示例,要是你对C++版本感兴趣,后续咱们也可以再交流探讨。
一、准备工作
我们用到的软件版本是Carsim2020.0和Matlab2017b,有需要安装包的小伙伴可以留言(嘿嘿,免费赠送哦)。这两个软件的版本兼容性对于联合仿真的顺利进行至关重要,大家在开始前一定要确认好。
二、路径规划算法
路径规划是车辆实现变道的第一步,在弯道场景下更是要精心设计。这里以一种简单直观的基于几何的路径规划算法为例。
假设我们已知车辆当前位置和目标位置(比如要变到的车道位置以及弯道的走向信息),可以通过如下代码实现简单的路径点生成(Matlab代码):
% 定义初始和目标位置
start_x = 0;
start_y = 0;
end_x = 100; % 假设目标x坐标
end_y = 10; % 假设目标y坐标用于变道
% 生成一系列路径点
num_points = 50;
x_path = linspace(start_x, end_x, num_points);
y_path = linspace(start_y, end_y, num_points);
% 简单的弯道处理,假设弯道是一个半径为r的圆弧一部分
r = 200;
for i = 1:num_points
if x_path(i) > 50
theta = (x_path(i) - 50) / r;
y_path(i) = r * (1 - cos(theta));
end
end这段代码首先定义了起始和目标位置,然后用linspace函数生成了一系列线性分布的路径点。后面部分针对弯道做了特殊处理,这里假设弯道从x = 50开始,半径为200,根据圆弧的几何关系调整了y坐标,从而生成符合弯道的路径点。
三、MPC轨迹跟踪算法(Simulink版本)
MPC(Model Predictive Control,模型预测控制)算法在轨迹跟踪方面表现出色。在Simulink中搭建MPC轨迹跟踪模块,我们可以利用Matlab提供的MPC设计器工具。
- 建立车辆模型:在Simulink中搭建一个简单的车辆动力学模型,比如自行车模型(这里简化车辆的动力学描述)。假设车辆的状态方程可以表示为:
\[ \begin{bmatrix} \dot{x} \\ \dot{y} \\ \dot{\theta} \end{bmatrix} = \begin{bmatrix} v \cos(\theta) \\ v \sin(\theta) \\ \frac{v}{L} \tan(\delta) \end{bmatrix} \]
其中,\(x, y\) 是车辆位置,\(\theta\) 是车辆航向角,\(v\) 是车速,\(L\) 是轴距,\(\delta\) 是前轮转向角。 - MPC控制器设计:在MPC设计器中,设置预测时域、控制时域等参数。例如预测时域设为10,控制时域设为3。目标是让车辆跟踪前面路径规划生成的路径点。
在Simulink中搭建的大致结构如下:
这里输入是路径点和车辆当前状态,经过MPC控制器计算出前轮转向角,输出给车辆模型,车辆模型再反馈当前状态给MPC控制器进行下一次计算。
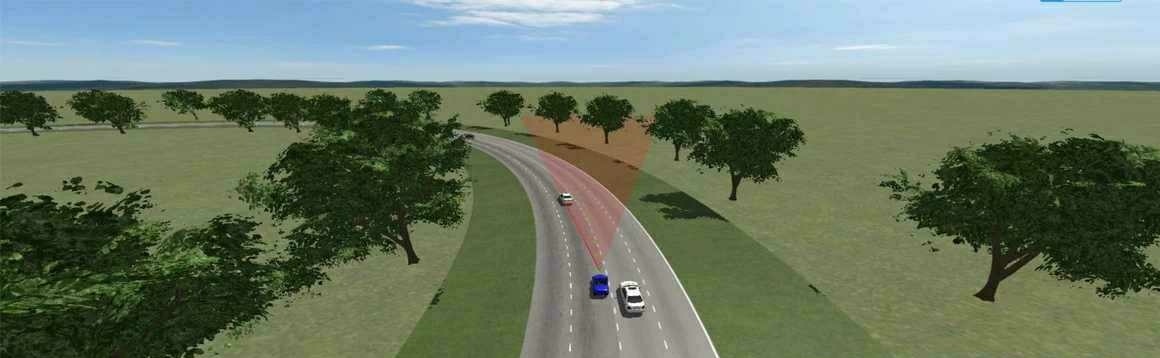
四、Carsim内规划轨迹可视化
在Carsim中实现规划轨迹的可视化,可以让我们更直观地看到车辆的行驶路径。在Carsim中,通过设置相关参数,导入我们在Matlab中生成的路径点。具体步骤如下:
- 在Carsim中找到路径输入模块。
- 将Matlab生成的路径点数据按照Carsim要求的格式整理(一般是x, y坐标序列)。
- 导入数据后,在Carsim的可视化界面中就可以看到规划的轨迹了。这一步能帮助我们验证路径规划和轨迹跟踪的效果是否符合预期。
五、联合仿真实现
最后,将Simulink中的MPC轨迹跟踪模块与Carsim的车辆动力学模型联合起来进行仿真。在Matlab中设置好Carsim与Simulink的联合仿真参数,确保数据能够在两者之间正确传递。
在联合仿真过程中,Simulink中的MPC根据车辆当前状态和路径点计算出转向角等控制量,传递给Carsim中的车辆模型,Carsim再将车辆的实际状态反馈给Simulink。通过这样的交互,实现车辆在弯道场景下准确地按照规划路径进行变道。
通过上述步骤,我们就完成了Carsim与Simulink联合仿真实现弯道变道,包括路径规划和MPC轨迹跟踪算法的整个流程。希望对大家在智能驾驶仿真领域的研究有所帮助,要是有问题,欢迎一起交流讨论!

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 36
36 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

{kind=link}
所有评论(0)