【移动机器人运动规划】lecture8: 经典的local planning框架-fast-planner and ego-planner
本文摘要了Fast-Planner和Ego-Planner两种规划算法的关键技术。Fast-Planner前端采用hybrid A*算法,通过AnalyticExpand函数实现高效搜索;后端使用B样条曲线优化轨迹,相比贝塞尔曲线具有局部修改特性。Ego-Planner则通过特定流程和程序框架实现路径规划。相关技术细节可参考CSDN系列博客笔记,包括基函数性质、控制点设置等核心内容。
目录
1.Fast-Planner
1.1 前端----hybrid A*
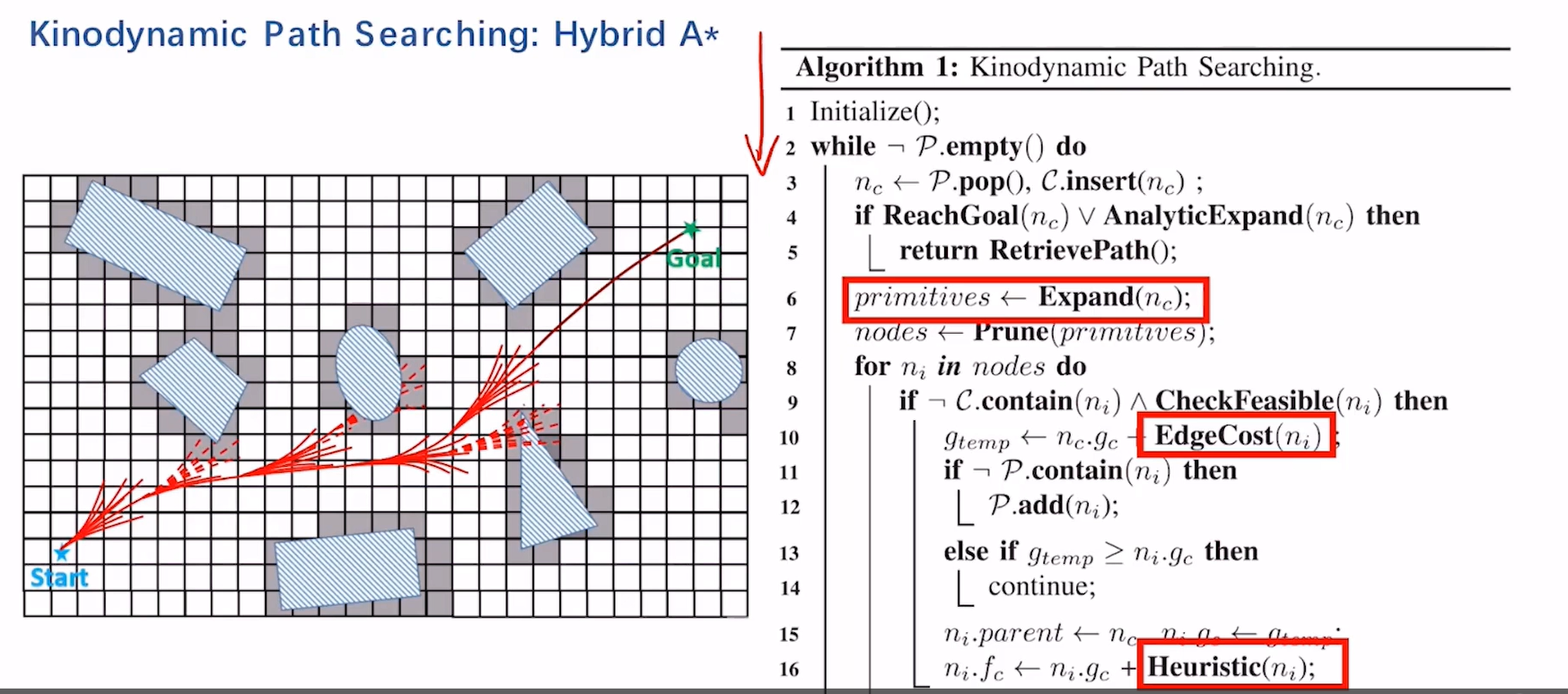
skill:暗红色线表示AnalyticExpand()函数,如果能够一步搜索到终点,就不再扩展。
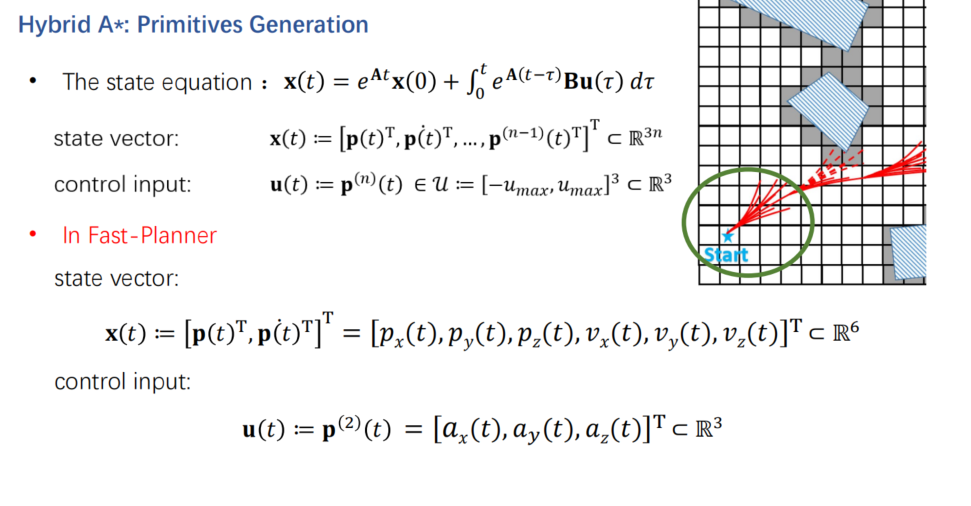
(1)基元的生成
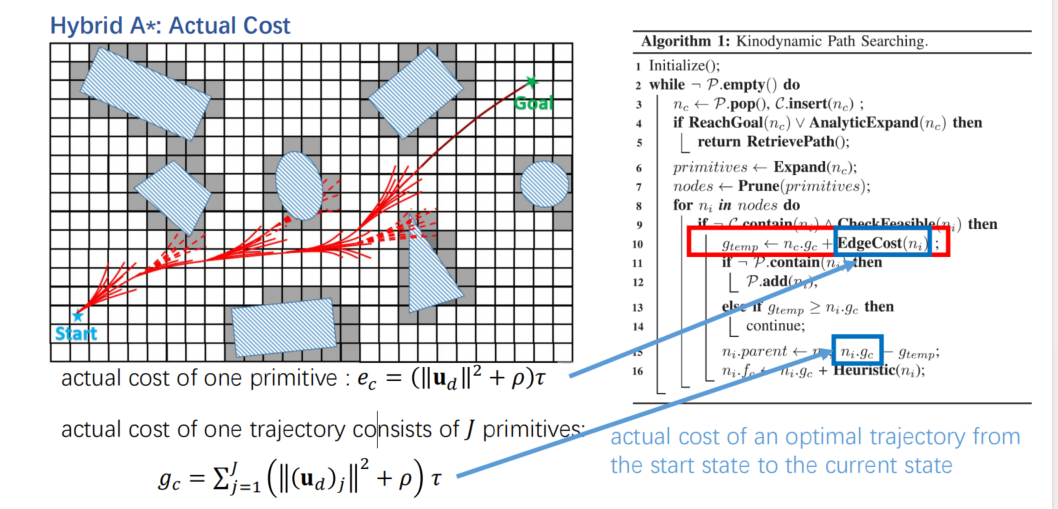
(2)edgecost
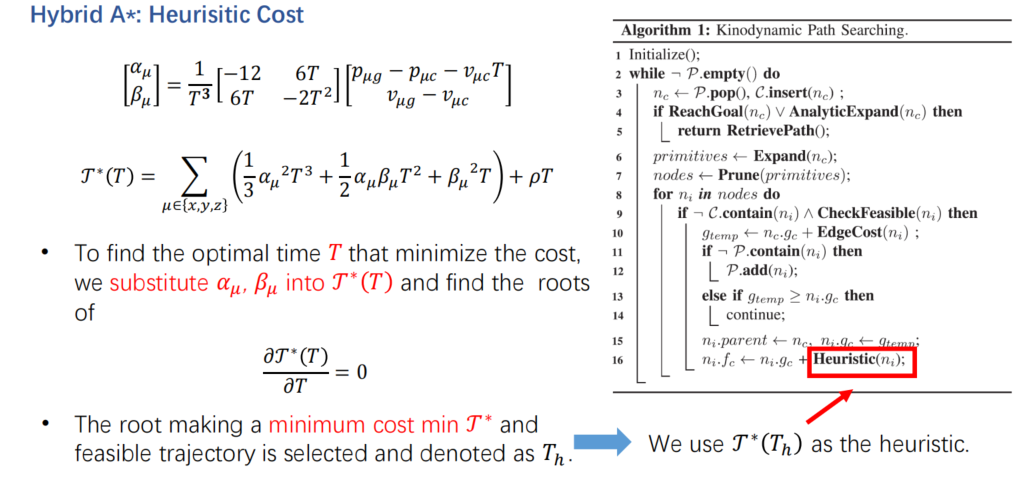
(3)heuristic cost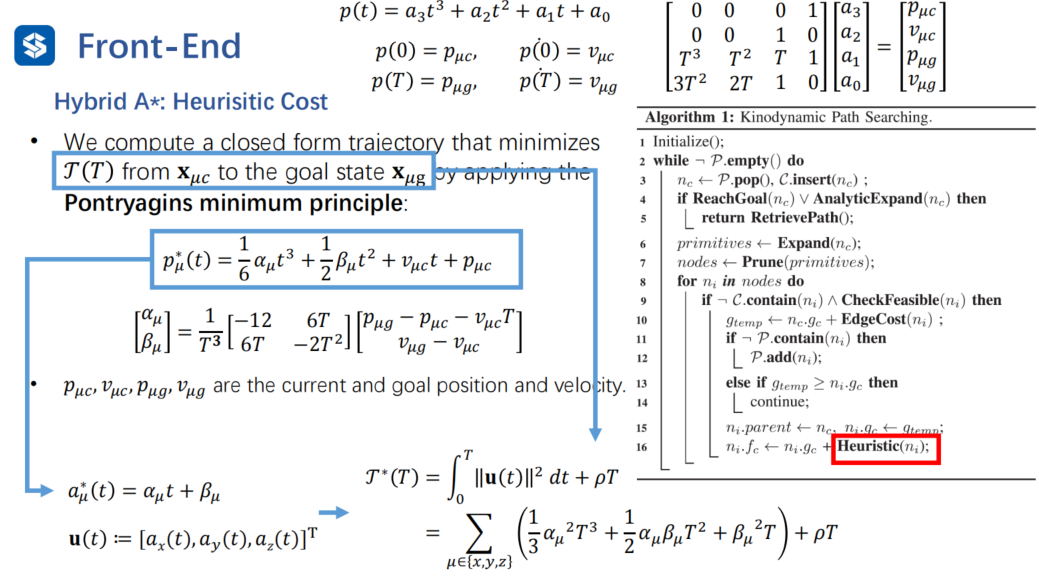
其他参考笔记:
Fast Planner规划算法(一)—— Fast Planner前端-CSDN博客
1.2 后端轨迹优化和时间重分配
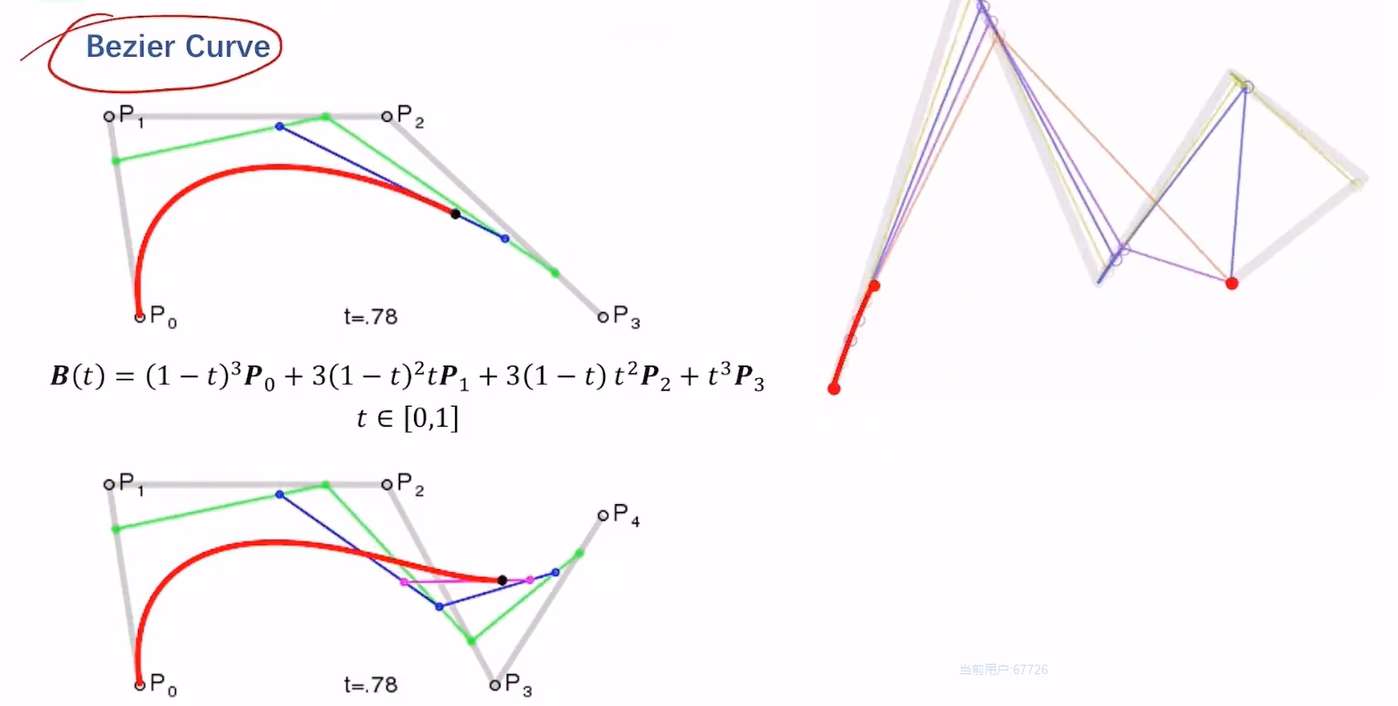
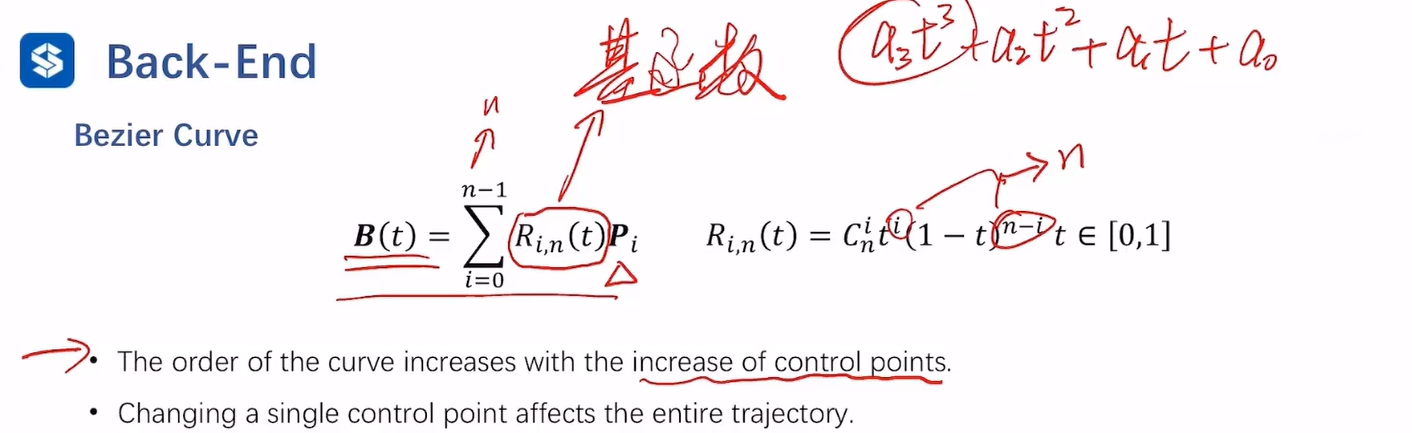
贝塞尔曲线缺点:控制点增加阶数也会增加;改变一个控制点整个轨迹都会发生变化
引出B样条,可以理解为分段的特殊贝塞尔曲线,在两段轨迹连接处天生就保证了平滑连续
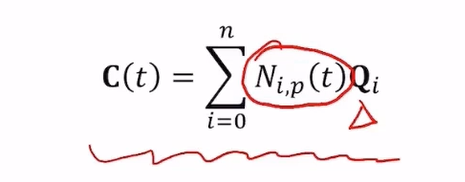
Q为控制点,基函数和贝塞尔曲线不同,t的定义也不同。基函数乘以控制点再累加
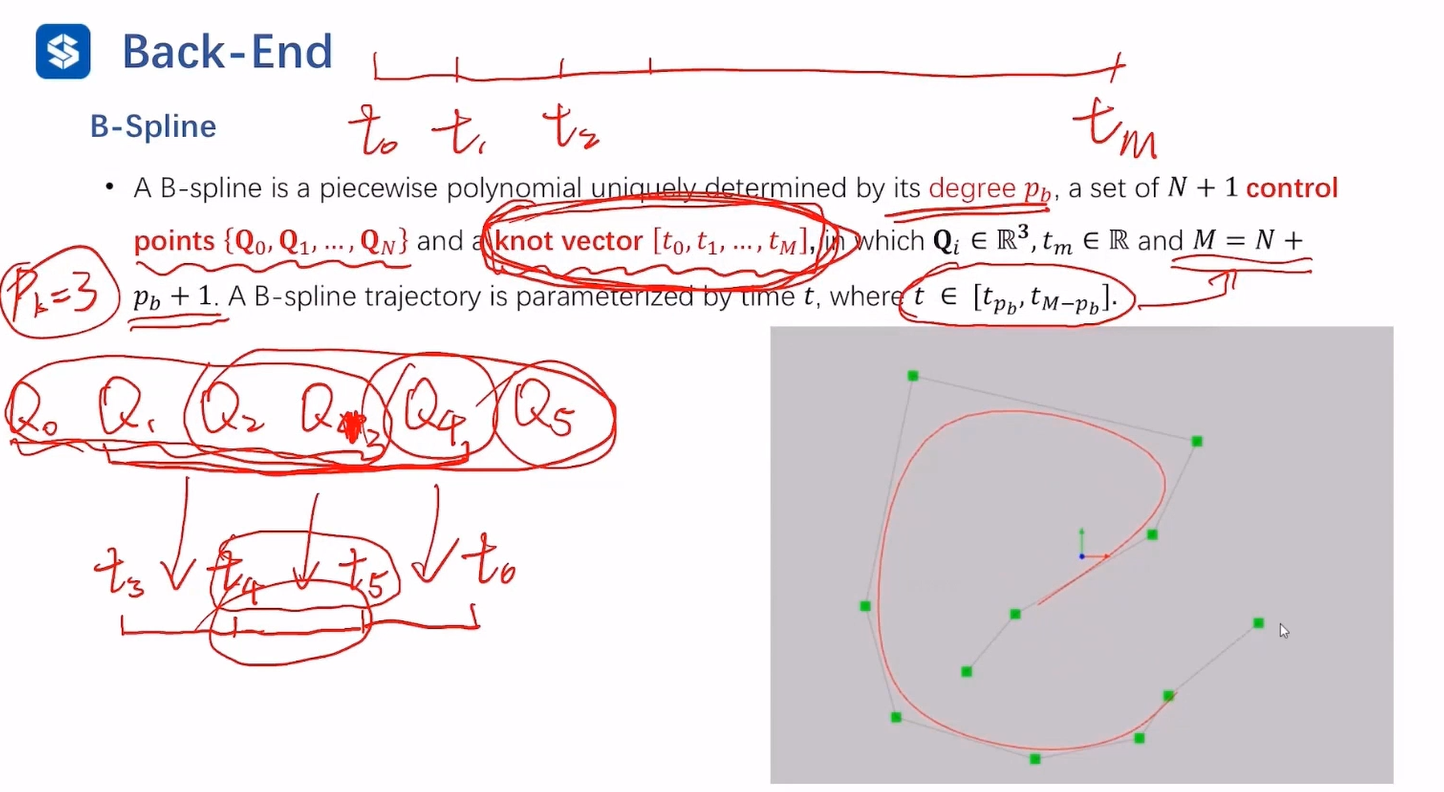
例如三阶B样条,有四个控制点Q0123控制t3-t4这段时间区间内的轨迹,只需再增加5这个控制点,使控制点Q1234控制t4-t5这段轨迹,以此类推,加了控制点后只会影响最新的一段轨迹。
均匀B样条
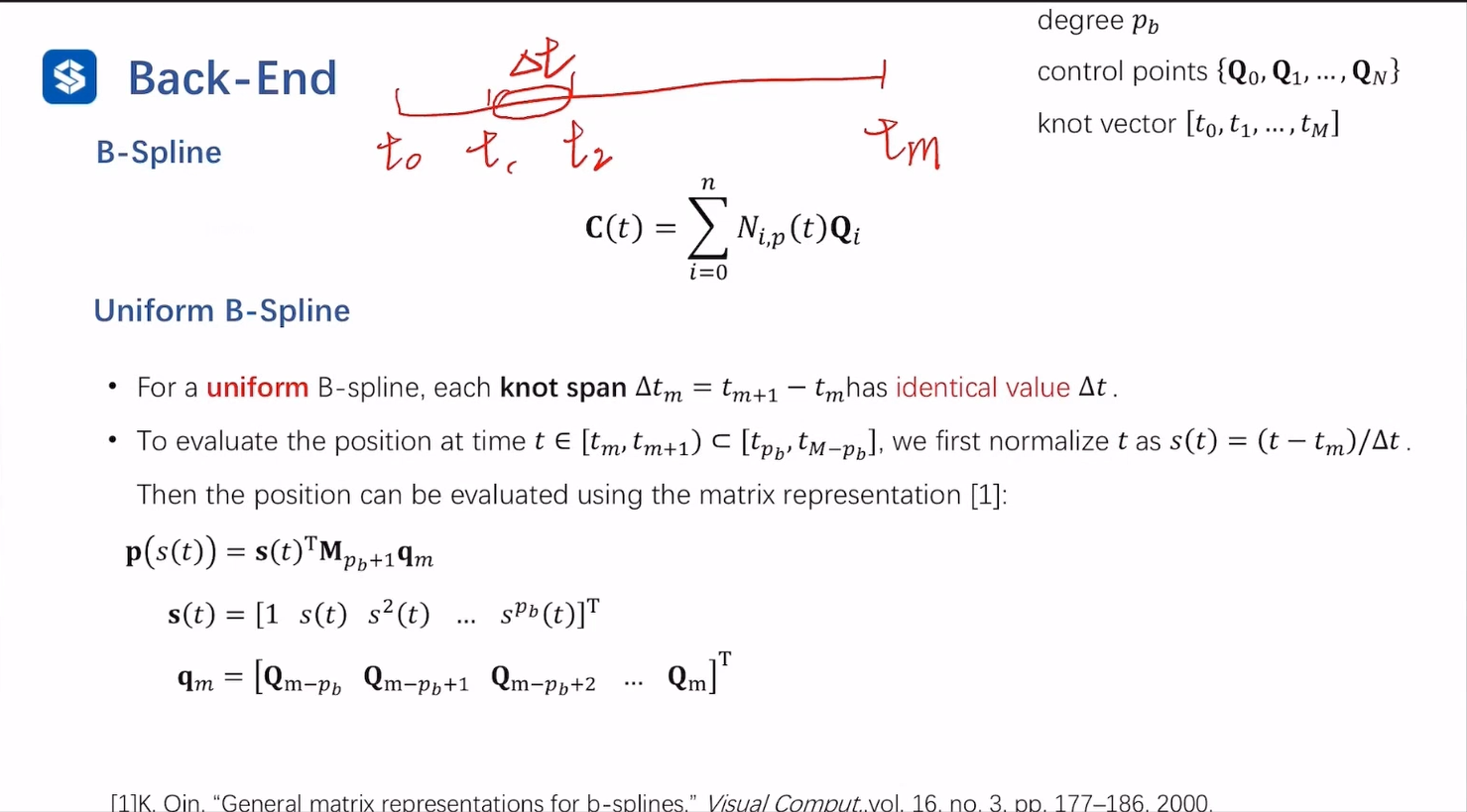
和B样条的区别:相邻的节点的差都是相同的,均为t
fast planner中对轨迹进行了特殊写法
B样条的基函数有一些特殊的性质
后续讲解参考笔记:
Fast Planner规划算法(二)—— Fast Planner后端之贝塞尔曲线与B样条曲线-CSDN博客
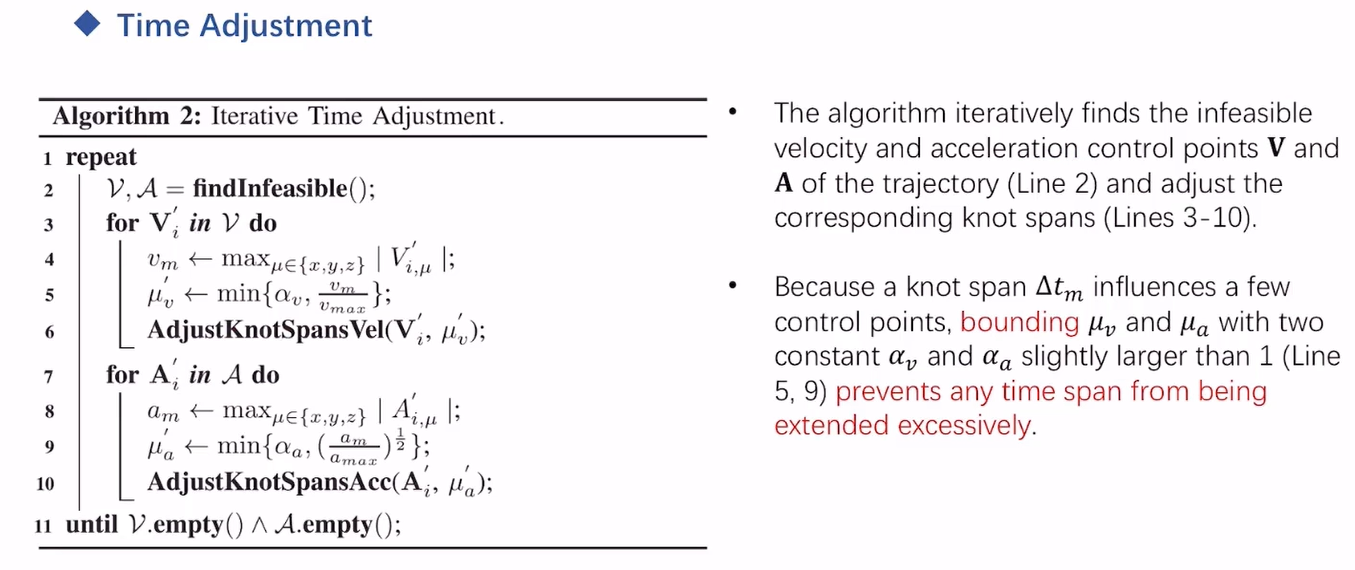
Fast Planner规划算法(三)—— Fast Planner后端之轨迹优化与轨迹优化与时间重分配_faster planner-CSDN博客
2. Ego-Planner
参考学习笔记:

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 3
3 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)