单目视觉结构光三维重建代码:互补格雷码四步相移法与多频外差法四步相移法(Matlab版本)及光...
有次我手滑把R矩阵转置了,结果点云直接倒立着出来,活像恐怖片里的场景。今天咱们就撸起袖子,用Matlab从标定文件开始,干一票完整的三维重建。调试到凌晨三点半,当第一个完整的人脸点云在屏幕上浮现时,手抖得差点打翻咖啡——这玩意儿比通关黑魂还有成就感。不过说真的,遇到条纹断裂别硬肝,八成是伽马校正没做好,在投影图案里加个非线性补偿就能解决大半问题。注意单位要统一,有次我把毫米和米混用了,点云直接变成
单目视觉结构光代码 三维重建 互补格雷码四步相移法 matlab版本 多频外差法四步相移法 matlab版本 也可咨询相关光栅测量问题 从加载标定结果到出最后的点云
深夜实验室的台灯下,屏幕泛着幽幽蓝光。右手边的马克杯里咖啡早就凉透,左手边的机械键盘却还在噼里啪啦作响——这场景结构光玩家再熟悉不过。今天咱们就撸起袖子,用Matlab从标定文件开始,干一票完整的三维重建。
先说标定这个事儿。拿到.mat文件别急着双击打开,用load('calib_results.mat')直接加载才是正经路子。重点盯着camK(相机内参)和R,t(旋转平移矩阵)这两个参数,这哥俩决定了后续三维坐标计算的命脉。有次我手滑把R矩阵转置了,结果点云直接倒立着出来,活像恐怖片里的场景。
相位计算是重头戏,四步相移的代码看着简单:
I1 = im2double(imread('phase0.bmp'));
I2 = im2double(imread('phase1.bmp'));
I3 = im2double(imread('phase2.bmp'));
I4 = im2double(imread('phase3.bmp'));
phase = atan2((I4-I2), (I1-I3)); % 核心就这行但注意这里的im2double千万别省,有一次我忘了转换数据类型,相位图直接炸成抽象画。算完记得用mat2gray把相位值规整到[-π, π],不然解码时绝对翻车。

格雷码解码才是真刺激。互补格雷码的优势在于边界容错,这里有个骚操作:
% 二进制转十进制时处理边界
code_value = bin2dec(num2str(code_bits)) + (edge_case_flag * 2^n_bits);这个edgecaseflag的处理能救命,特别是当物体边缘出现反光时。记得每次投影格雷码前要用imresize调整到和相机分辨率一致,不然就像拼图对不上号。
到了多频外差这里,重点在相位展开。核心算法是:
lambda = (high_freq_phase - low_freq_phase) / (2*pi);
unwrap_phase = high_freq_phase + round(lambda)*2*pi;但实际调试时发现,当物体表面反射率低于15%时,这个round函数会抽风。后来加了个中值滤波预处理才稳住,血泪教训啊。
点云生成环节,这个公式得刻烟吸肺:
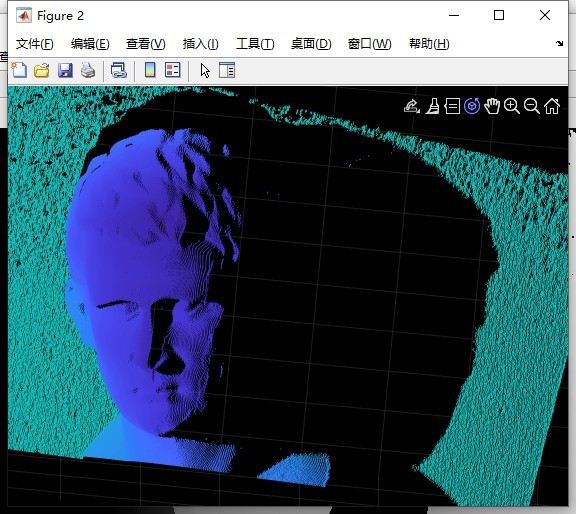
Z = (camK(1,1)*baseline) ./ (disparity + (camK(1,3)-x)*baseline/f);其中baseline是投影仪与相机的基线距离。注意单位要统一,有次我把毫米和米混用了,点云直接变成蚂蚁大小。最后用pcshow前务必做离群点剔除,不然点云里全是噪点,密集恐惧症都要犯了。
调试到凌晨三点半,当第一个完整的人脸点云在屏幕上浮现时,手抖得差点打翻咖啡——这玩意儿比通关黑魂还有成就感。不过说真的,遇到条纹断裂别硬肝,八成是伽马校正没做好,在投影图案里加个非线性补偿就能解决大半问题。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 4
4 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)