计算机视觉之三维重建课程笔记(八):SfM系统解析
SfM系统解析,以OpenMVG为例OpenMVG 是一个,主要用于,也就是从多张 2D 图像中恢复出 3D 场景结构和相机位姿文章链接:计算机视觉之三维重建(深入浅出SfM与SLAM核心算法)—— 8.运动恢复结构(SfM)系统解析_哔哩哔哩_bilibili。
·
SfM系统解析,以OpenMVG为例
OpenMVG 是一个 开源的多视几何(Multiple View Geometry)库,主要用于 结构光束法恢复(Structure-from-Motion, SfM),也就是从多张 2D 图像中恢复出 3D 场景结构和相机位姿
文章链接:
SfM系统设计:
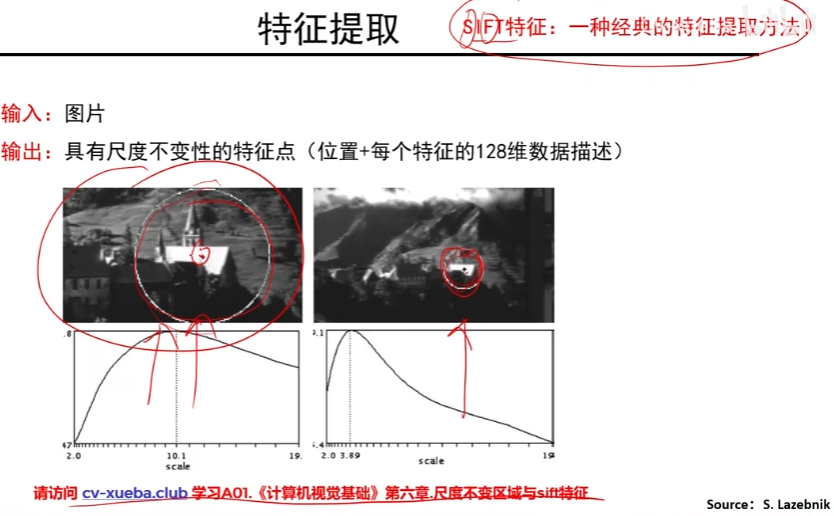
输入:多张图片 (其中的相机的内参是默认已知的)
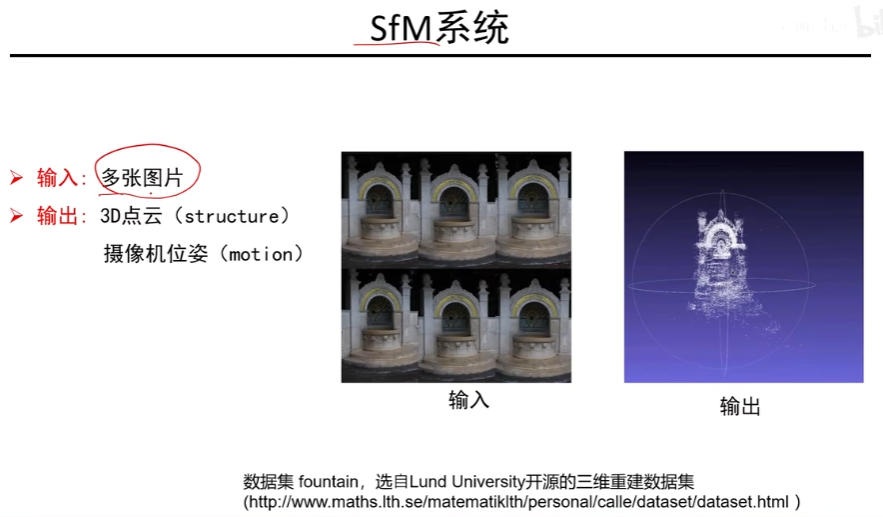
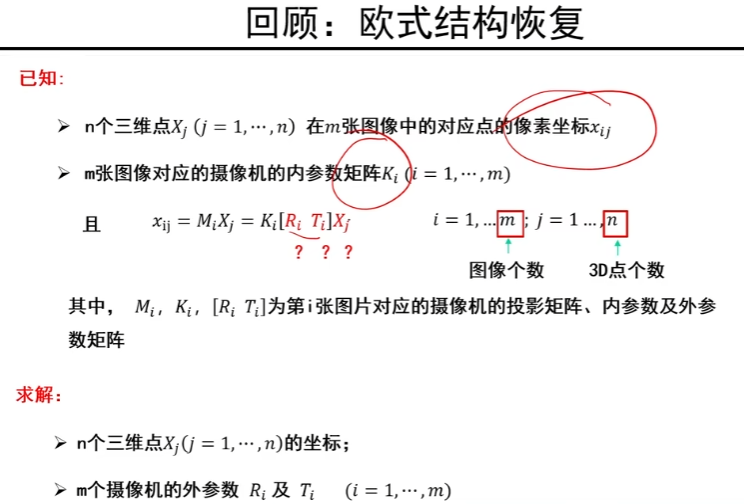
摄像机内参如何来? 图像的EXIF的信息就包含这个信息
注意:像素点坐标是不知道的
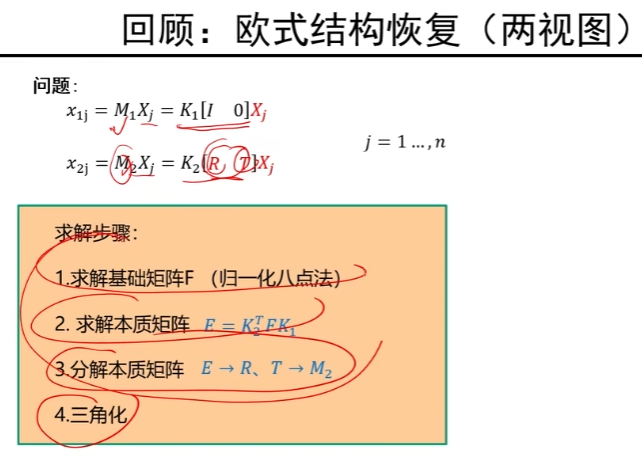
两视图SfM系统:
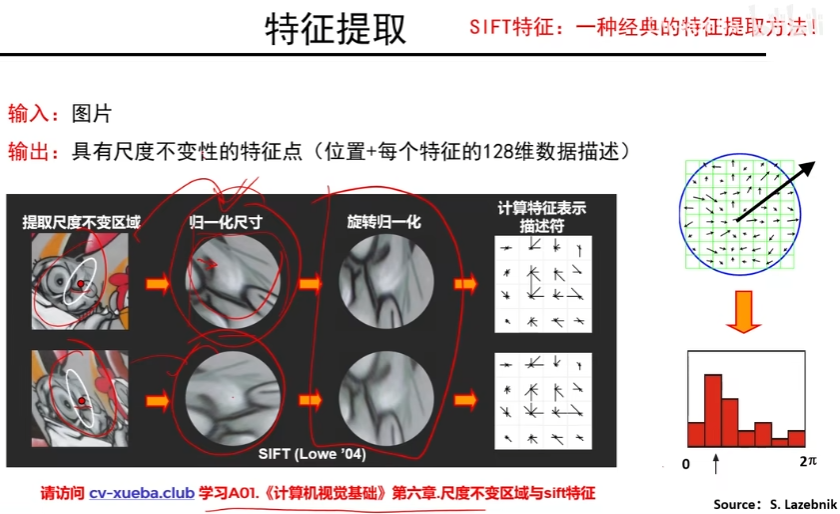
SIFT可以提取尺度不变的特征,包含一个点和周围的信息
尺寸归一化:
旋转归一化:
明暗归一化
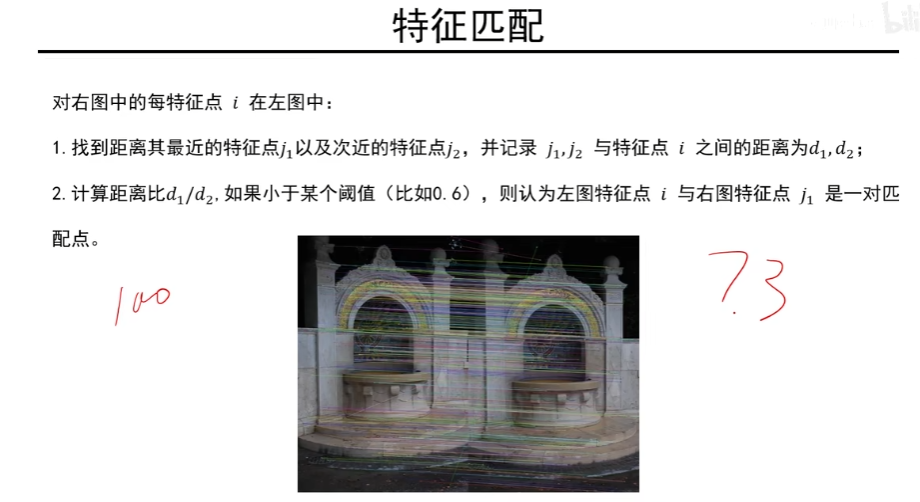
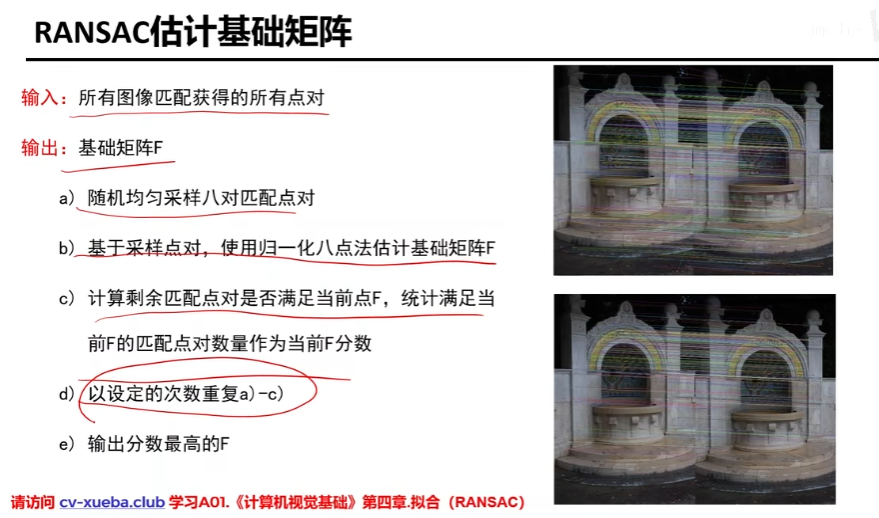
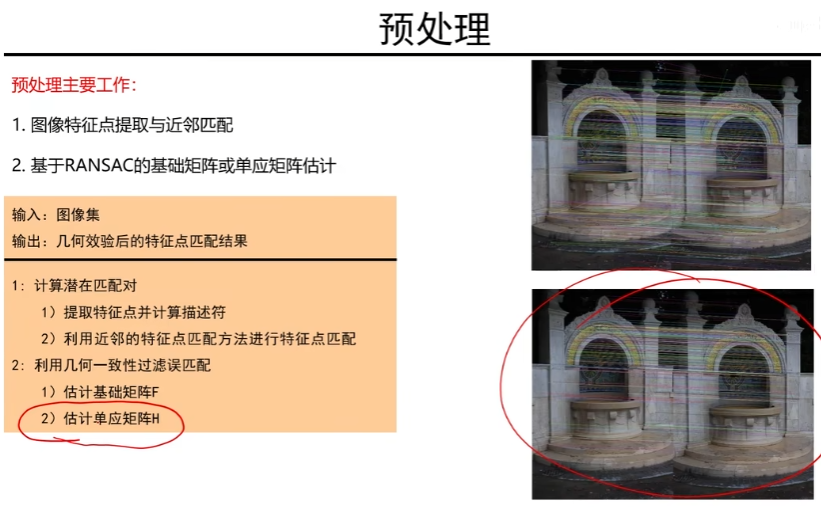
由于初始的匹配结果可能会存在噪声,就可以用RANSAC的方法来优化匹配结果
RANSAC 的全称是 Random Sample Consensus(随机采样一致性),它是一种常用的 鲁棒参数估计方法,常用于在数据中含有大量噪声或离群点(outliers)的情况下,寻找最符合多数数据的模型。
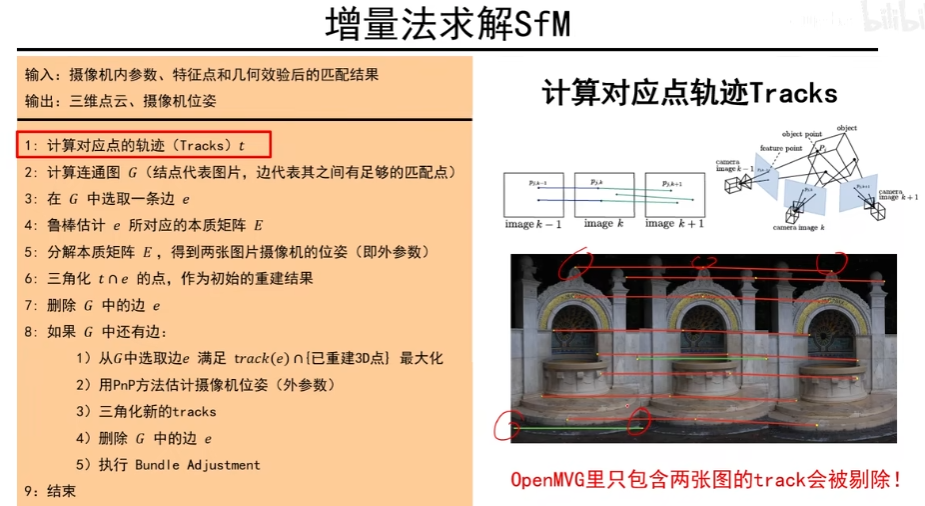
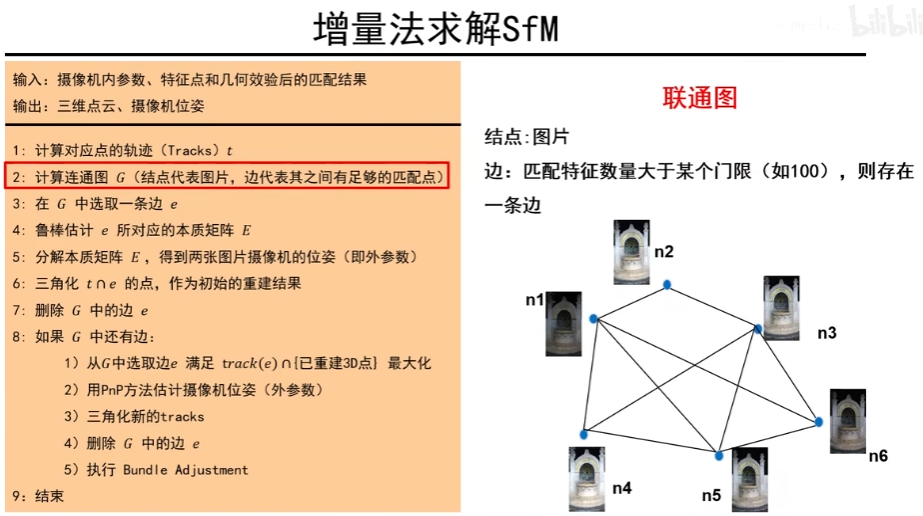
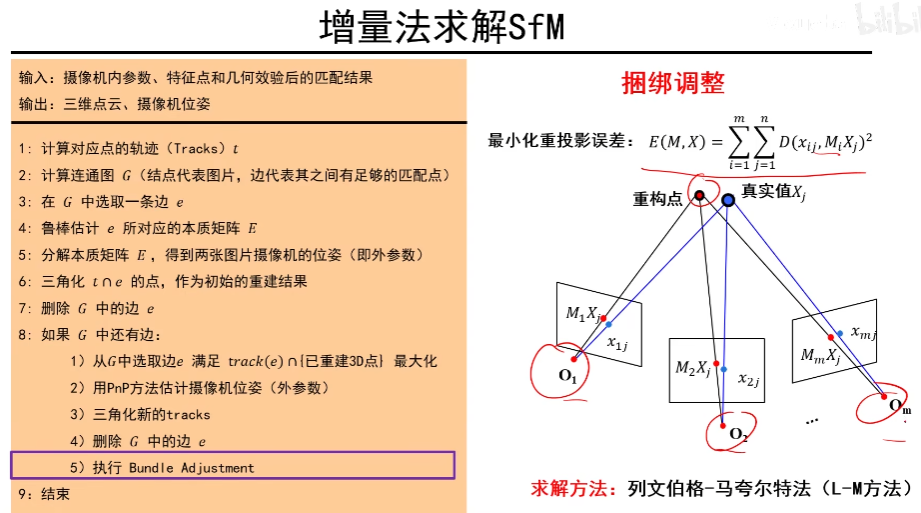
基于增量法的SfM系统:
通常以第一个摄像机为世界坐标系
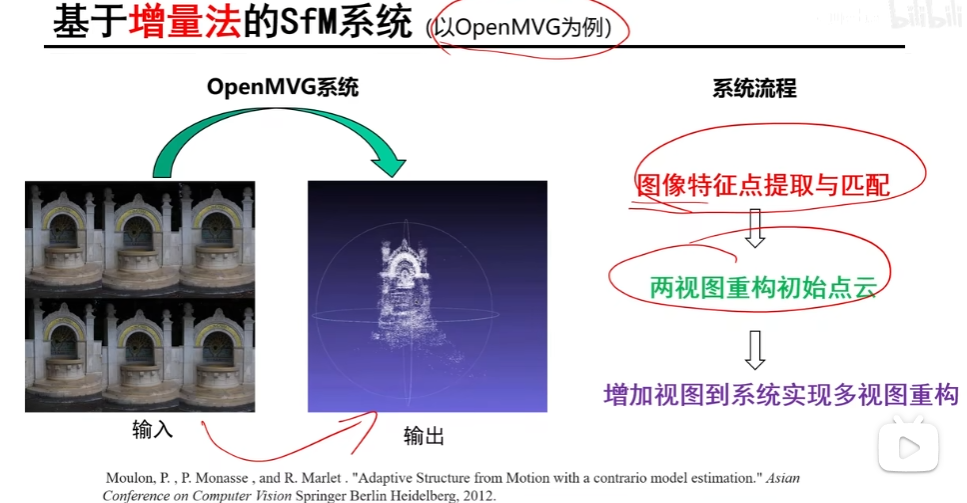
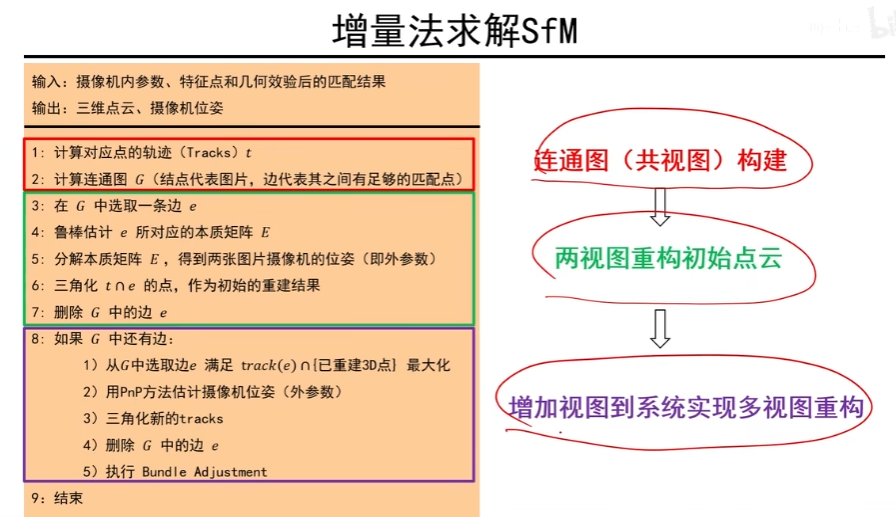
每步都用bundle adjustment进行修正

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 5
5 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)