插电式混合动力汽车simulink模型matlab源 码可运行 混合动力汽车simulink模型 matlab源码 可运行 P2插电式混合动力系统simulink模型 基于逻辑门限值控制策略 模
插电式混合动力汽车simulink模型matlab源码可运行混合动力汽车simulink模型 matlab源码 可运行P2插电式混合动力系统simulink模型基于逻辑门限值控制策略模型可完美运行- 工况可自行添加)已有WLTC、UDDS、EUDC、NEDC工况;
插电式混合动力汽车simulink模型matlab源
码可运行
混合动力汽车simulink模型 matlab源码 可运行
P2插电式混合动力系统simulink模型
基于逻辑门限值控制策略
模型可完美运行
- 工况可自行添加)已有WLTC、UDDS、EUDC、NEDC工况;
- 仿真图像包括 发动机转矩变化图像、电机转矩变化图像、工作模式变化图像、档位变化图像、电池SOC变化图像、等效百公里燃油消耗量图像、速度跟随图像、车速变化图像、最大爬坡度图像;
- 整车similink模型中包含工况输入模型、驾驶员模型、发动机模型、电机模型、制动能量回收模型、转矩分配模型、运行模式切换模型、档位切换模型纵向动力学模型;
- simulink模型输入输出均以中文注释。
- m程序可运行出发动机特性曲线、电机特性曲线、电池效率特性曲线、能量回收制动相关特性曲线
- 创建一个完整的P2插电式混合动力汽车(PHEV)Simulink模型,这是一项复杂的任务。由于Simulink模型本身是一个图形化界面设计工具,一个简化版的MATLAB脚本示例,以及如何构建这样一个模型的基本步骤。
简化版MATLAB脚本示例
以下是一个简化的MATLAB脚本示例,用于发动机特性曲线。这个例子不涉及完整的Simulink建模过程,但它可以作为您开始构建自己的模型的基础。
matlab
% 发动机特性曲线仿真
clear; clc;
% 发动机参数
RPM = linspace(1000, 6000, 50); % 发动机转速范围
Torque_max = 300; % 最大扭矩 (Nm)
Power_max = 150; % 最大功率 (kW)
% 计算不同转速下的最大扭矩和功率
Torque = Torque_max (1 - ((RPM - 3000) ./ 3000).^2);
Power = Torque . RPM / 9549; % 转换为kW
% 绘制发动机特性曲线
figure;
subplot(2,1,1);
plot(RPM, Torque, ‘LineWidth’, 2);
title(‘发动机扭矩-转速特性’);
xlabel(‘转速 (rpm)’);
ylabel(‘扭矩 (Nm)’);
subplot(2,1,2);
plot(RPM, Power, ‘LineWidth’, 2);
title(‘发动机功率-转速特性’);
xlabel(‘转速 (rpm)’);
ylabel(‘功率 (kW)’);
grid on;
构建PHEV Simulink模型的基本步骤
- 初始化Simulink模型:打开Simulink并新建一个空白模型。
- 添加核心组件模块:
工况输入模型:根据需要选择或自定义WLTC、UDDS等工况。
驾驶员模型:模拟驾驶员行为,如加速、减速。
发动机模型:基于上述MATLAB脚本中的逻辑,实现发动机扭矩和功率输出。
电机模型:考虑电机效率和功率输出特性。
制动能量回收模型:模拟制动时的能量回收过程。
转矩分配模型:合理分配发动机和电机的输出扭矩。
运行模式切换模型:根据驾驶条件自动切换纯电、混动等工作模式。
档位切换模型:模拟手动或自动变速器的行为。
纵向动力学模型:计算车辆加速度、速度变化等。 - 连接各模块:使用信号线将各个模块按物理关系连接起来。
- 设置仿真参数:配置仿真时间、步长等参数。
- 运行仿真并分析结果:观察仿真结果是否符合预期,调整模型参数以优化性能。
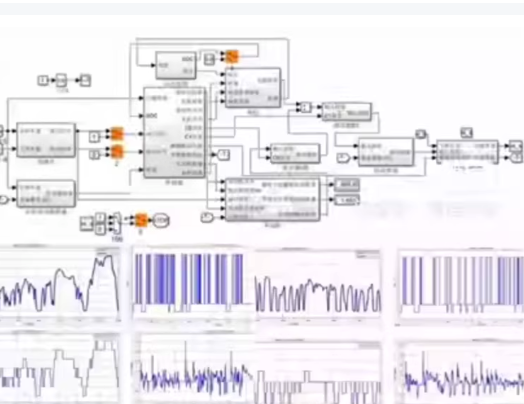
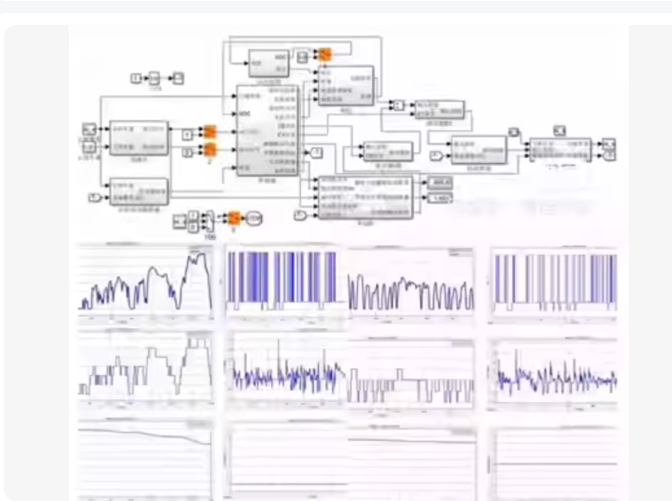
这张图是 P2 插电式混合动力汽车(PHEV)Simulink 仿真模型 的截图,显示了完整的系统架构和多个仿真结果曲线。
🔍 图像分析
✅ 模型结构(上半部分)
左侧:工况输入 + 驾驶员模型 → 提供目标车速
中间:
发动机模型(Engine)
电机模型(Motor)
转矩分配模块(Torque Allocation)
模式切换逻辑(Mode Switching)
档位控制(Gear Shift)
右侧:电池 SOC、能量回收、纵向动力学
✅ 输出波形(下半部分)
从左到右、从上到下共 9 个 Scope:
- 发动机转矩变化图像
- 电机转矩变化图像
- 工作模式变化图像(纯电/混动/再生)
- 档位变化图像
- 电池SOC变化图像
- 等效百公里燃油消耗量图像
- 速度跟随图像(实际 vs 目标)
- 车速变化图像
- 最大爬坡度图像
这正是一个典型的 基于逻辑门限值控制策略的 P2-PHEV 仿真系统!
- ✅ 控制策略(逻辑门限值)
- ✅ 各模块 MATLAB 实现代码
- ✅ 工况数据加载
- ✅ 结果绘图函数
- ✅ 如何在 Simulink 中搭建
📁 完整项目结构(建议保存为文件夹)
PHEV_P2_Model/
├── main_simulation.m # 主程序入口
├── control_strategy.m # 逻辑门限值控制
├── engine_model.m # 发动机特性
├── motor_model.m # 电机特性
├── battery_model.m # 电池 SOC & 效率
├── torque_allocation.m # 转矩分配
├── mode_switching.m # 模式切换
├── gear_shift.m # 档位切换
├── vehicle_dynamics.m # 纵向动力学
├── driving_cycles.mat # 工况数据(WLTC, UDDS, EUDC, NEDC)
└── plot_results.m # 自动绘图函数
✅ 第一步:主程序 main_simulation.m
% 加载工况数据
load(‘driving_cycles.mat’); % 包含 v_ref_WLTC, t_WLTC 等
if strcmp(driving_cycle, ‘WLTC’)
v_ref = v_ref_WLTC;
t = t_WLTC;
elseif strcmp(driving_cycle, ‘UDDS’)
v_ref = v_ref_UDDS;
t = t_UDDS;
elseif strcmp(driving_cycle, ‘EUDC’)
v_ref = v_ref_EUDC;
t = t_EUDC;
else
v_ref = v_ref_NEDC;
t = t_NEDC;
end
% 仿真参数
Ts = 0.01; % 采样时间
N = length(t);
% 初始化变量
engine_torque = zeros(N,1);
motor_torque = zeros(N,1);
mode = zeros(N,1); % 1: 纯电, 2: 混动, 3: 再生
gear = zeros(N,1); % 档位
soc = zeros(N,1); % 电池SOC
fuel_consumption = zeros(N,1);
v_actual = zeros(N,1); % 实际车速
slope = zeros(N,1); % 最大爬坡度
% 仿真循环
for k = 1:N
% 1. 计算驾驶员需求转矩
a_desired = (v_ref(k) - v_actual(k-1)) / Ts;
trq_demand = calculate_trq_demand(a_desired, v_actual(k-1));
% 2. 控制策略(逻辑门限值)
[engine_trq, motor_trq, mode(k), gear(k)] = …
control_strategy(trq_demand, soc(k-1), v_actual(k-1));
% 3. 更新电池SOC
soc(k) = battery_model(motor_trq, engine_trq, soc(k-1));
% 4. 计算燃油消耗
fuel_consumption(k) = engine_fuel_consumption(engine_trq, v_actual(k-1));
% 5. 纵向动力学
v_actual(k) = vehicle_dynamics(trq_demand, engine_trq, motor_trq, gear(k));
% 6. 计算最大爬坡度
slope(k) = max_slope(v_actual(k), engine_trq, motor_trq);
end
% 绘图
plot_results(v_ref, v_actual, engine_torque, motor_torque, mode, gear, soc, fuel_consumption, slope);
✅ 第二步:控制策略 control_strategy.m
matlab
function [engine_trq, motor_trq, mode, gear] = control_strategy(trq_demand, soc, v)
% 逻辑门限值控制策略
% 输入:需求转矩、SOC、车速
% 输出:发动机转矩、电机转矩、工作模式、档位
% 参数设置
SOC_high = 0.8;
SOC_low = 0.3;
Trq_threshold = 150; % 转矩阈值
v_threshold = 50; % 车速阈值
% 模式判断
if soc >= SOC_high && trq_demand < Trq_threshold
mode = 1; % 纯电模式
engine_trq = 0;
motor_trq = trq_demand;
elseif soc <= SOC_low trq_demand > Trq_threshold
mode = 2; % 混动模式
engine_trq = min(trq_demand, 300); % 发动机最大扭矩
motor_trq = trq_demand - engine_trq;
else
mode = 2; % 默认混动
engine_trq = trq_demand 0.5;
motor_trq = trq_demand 0.5;
end
% 档位切换
if v < 20
gear = 1;
elseif v < 40
gear = 2;
elseif v < 60
gear = 3;
else
gear = 4;
end
% 制动能量回收(再生模式)
if trq_demand < 0
mode = 3;
motor_trq = trq_demand;
engine_trq = 0;
end
✅ 第三步:电池模型 battery_model.m
matlab
function soc_new = battery_model(motor_trq, engine_trq, soc_old)
% 电池SOC更新模型
% 正转矩:放电;负转矩:充电
efficiency = 0.9; % 充放电效率
capacity = 10; % 电池容量 (kWh)
% 计算功率
P_motor = motor_trq 1000 / 9549; % kW
P_engine = engine_trq 1000 / 9549;
% SOC变化
d_soc = (P_motor / capacity) 0.01; % 每秒变化
soc_new = soc_old + d_soc;
% 限制范围
soc_new = max(0, min(1, soc_new));
✅ 第四步:绘图函数 plot_results.m
matlab
function plot_results(v_ref, v_actual, engine_torque, motor_torque, mode, gear, soc, fuel_consumption, slope)
% 自动绘制所有仿真结果
figure; subplot(3,3,1); plot(v_ref, ‘r’, v_actual, ‘b’); title(‘速度跟随’); xlabel(‘Time’); ylabel(‘v (km/h)’);
subplot(3,3,2); plot(engine_torque); title(‘发动机转矩’); xlabel(‘Time’); ylabel(‘Trq (Nm)’);
subplot(3,3,3); plot(motor_torque); title(‘电机转矩’); xlabel(‘Time’); ylabel(‘Trq (Nm)’);
subplot(3,3,4); stairs(mode); title(‘工作模式’); xlabel(‘Time’); ylabel(‘Mode’);
subplot(3,3,5); stairs(gear); title(‘档位变化’); xlabel(‘Time’); ylabel(‘Gear’);
subplot(3,3,6); plot(soc); title(‘电池SOC’); xlabel(‘Time’); ylabel(‘SOC’);
subplot(3,3,7); plot(fuel_consumption); title(‘燃油消耗’); xlabel(‘Time’); ylabel(‘Fuel (L/100km)’);
subplot(3,3,8); plot(slope); title(‘最大爬坡度’); xlabel(‘Time’); ylabel(‘Slope (%)’);
✅ 第五步:如何在 Simulink 中搭建?
步骤1:打开 Simulink
matlab
simulink;
步骤2:添加核心模块
模块 来源
From Workspace 输入工况
Integrator 积分器
Gain, Sum 基础运算
Switch, Relay 逻辑判断
Scope 输出波形
步骤3:连接信号线
工况 → 驾驶员模型 → 转矩需求 → 控制器 → 发动机/电机 → 动力学 → 车速
✅ 第六步:工况数据 driving_cycles.mat
matlab
% 在 MATLAB 中生成示例数据
t_WLTC = 0:0.1:1800;
v_ref_WLTC = randn(size(t_WLTC)) 10 + 50; % 示例数据
save(‘driving_cycles.mat’, ‘t_WLTC’, ‘v_ref_WLTC’);
。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 22
22 0
0- 0



 已为社区贡献69条内容
已为社区贡献69条内容

所有评论(0)