芒果YOLOv12改进32:损失函数IoU篇之Wise-IoU:最新YOLOv8结合最新WIoU损失函数,超越CIoU, SIoU性能,涨点神器|让YOLO模型高效涨点,目标检测的新损失
芒果YOLOv12改进32:损失函数IoU篇之Wise-IoU:最新YOLOv8结合最新WIoU损失函数,超越CIoU, SIoU性能,涨点神器|让YOLO模型高效涨点,目标检测的新损失
💡只订阅这一个专栏即可阅读:芒果YOLOv12所有改进内容
即插即用 | 损失函数IoU篇之Wise-IoU:最新YOLOv12结合最新WIoU损失函数,超越CIoU, SIoU性能,涨点神器|让YOLO模型高效涨点,目标检测的新损失: Wise-IoU
重点:🔥🔥🔥YOLOv12 使用这个 Wise-IoU 创新点 在数据集改进做实验:即插即用
内附的改进源代码改进,按步骤操作运行改进后的代码即可
适合用来改进作为 🚀改进点 重点:原创给出多种配置:针对论文原版的改进版本
来自COCO数据集训练 涨点情况
本博客附其他IoU损失函数改进:包括SIoU、GIoU、EIoU、α-IoU等,包含完整源代码
改进源码教程 | 详情如下🥇
文章目录
一、Wise-IoU理论部分 + YOLOv12代码实践
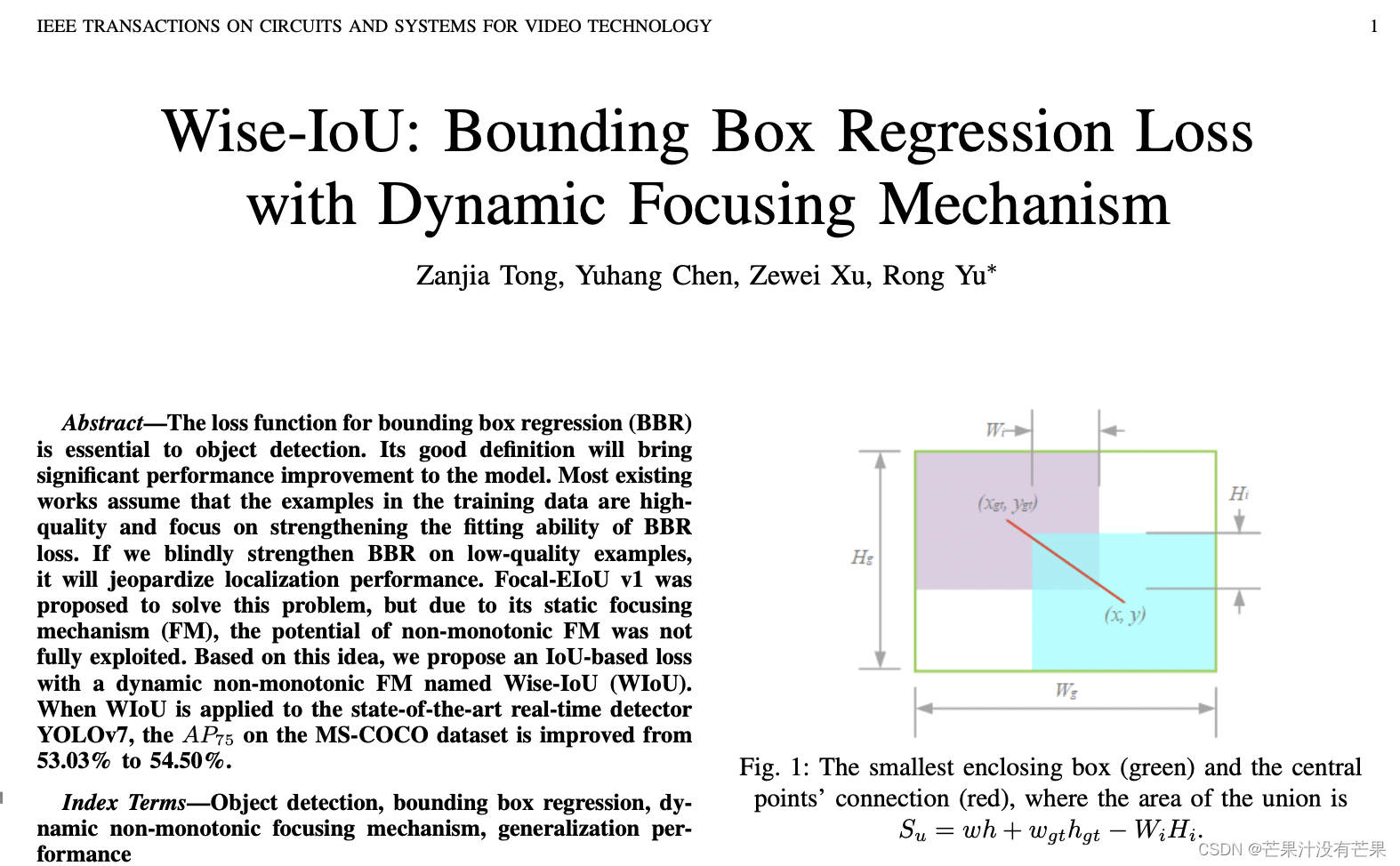
边界框回归 (BBR) 的损失函数对于对象检测至关重要。其良好的定义将为模型带来显着的性能提升。大多数现有工作都假设训练数据中的示例是高质量的,并且侧重于加强 BBR 损失的拟合能力。如果我们盲目地在低质量示例上加强 BBR,将会危及本地化性能。Focal-EIoU v1被提出来解决这个问题,但由于其静态聚焦机制(FM),非单调FM的潜力没有得到充分发挥。基于这个想法,我们提出了一种基于 IoU 的损失,该损失具有名为 Wise-IoU (WIoU) 的动态非单调 FM。
当 WIoU 应用于最先进的实时检测器 YOLOv7 时,MS-COCO 数据集上的 AP-75 从 53.03% 提高到 54.50%。
涨点效果(实测涨点)
有同学反馈,YOLOv5 进行改进实验 实测涨点。
其他YOLO系列实验(涨点)
在其他YOLO系列上也尝试过,也是涨点的情况
来自COCO数据集训练中
论文主要贡献
- 提出了
BBR的基于注意力的损失WIoU v1,它在仿真实验中实现了比最先进的SIoU更低的回归误差。 - 设计了
具有单调FM的WIoU v2和具有动态非单调FM的WIoU v3。利用动态非单调FM的明智的梯度增益分配策略。 - 对低质量的样本的影响进行了一系列详细的研究,证明了动态非单调调频的有效性和效率。
论文方法
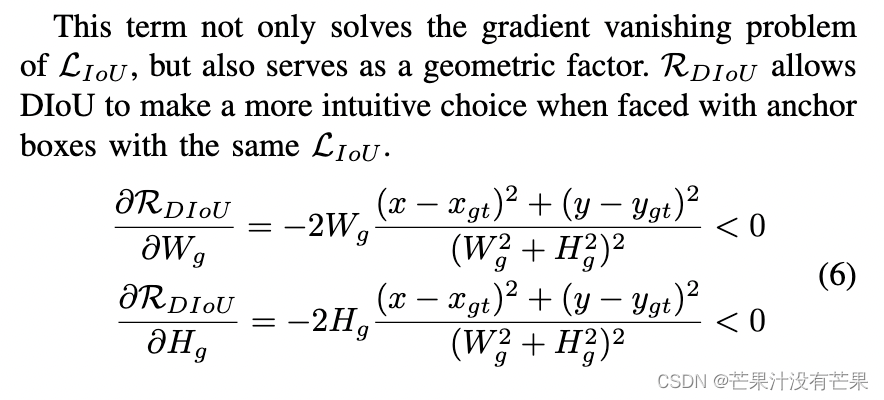
梯度消失问题的解决方案
现有的 BBR 损失 [15]-[18] 是基于加法的,并且遵循低范式如方程式所示。 4.
距离 IoU:Zhaohui Zheng 等人。
- 定义 R_DIoU [16]作为两个中心点之间的归一化距离边界框:

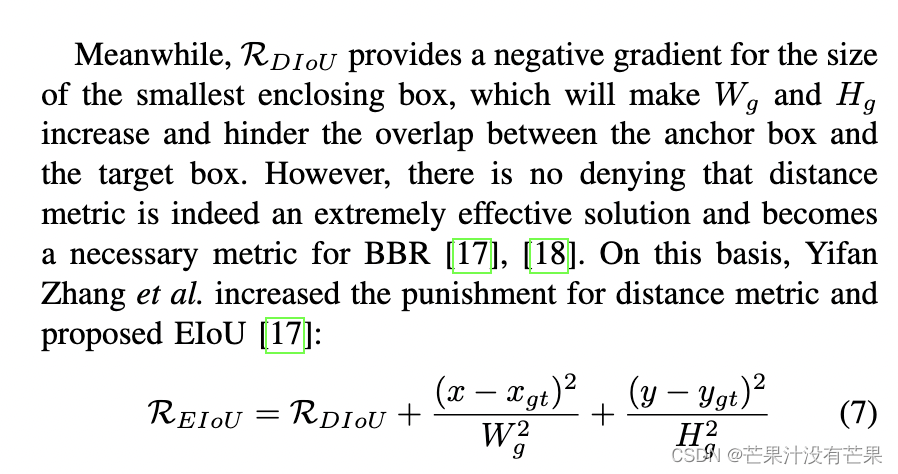
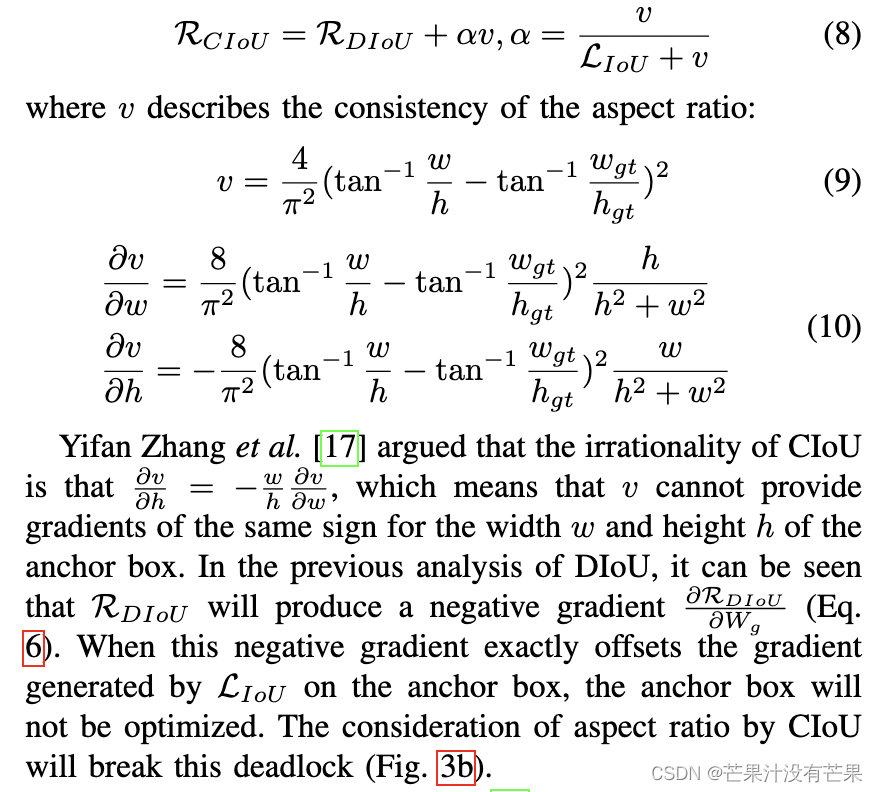
- Complete IoU:在 RDIoU 的基础上,Zhaohui Zheng 等人。 添加了纵横比的考虑,提出了 RCIoU [16]:
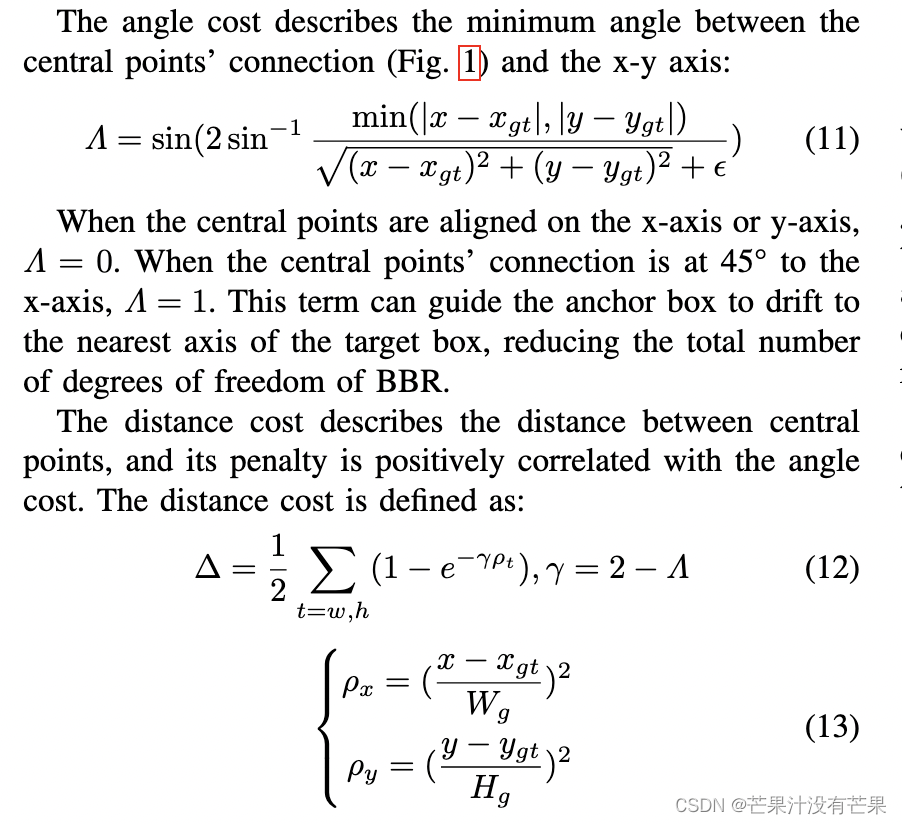
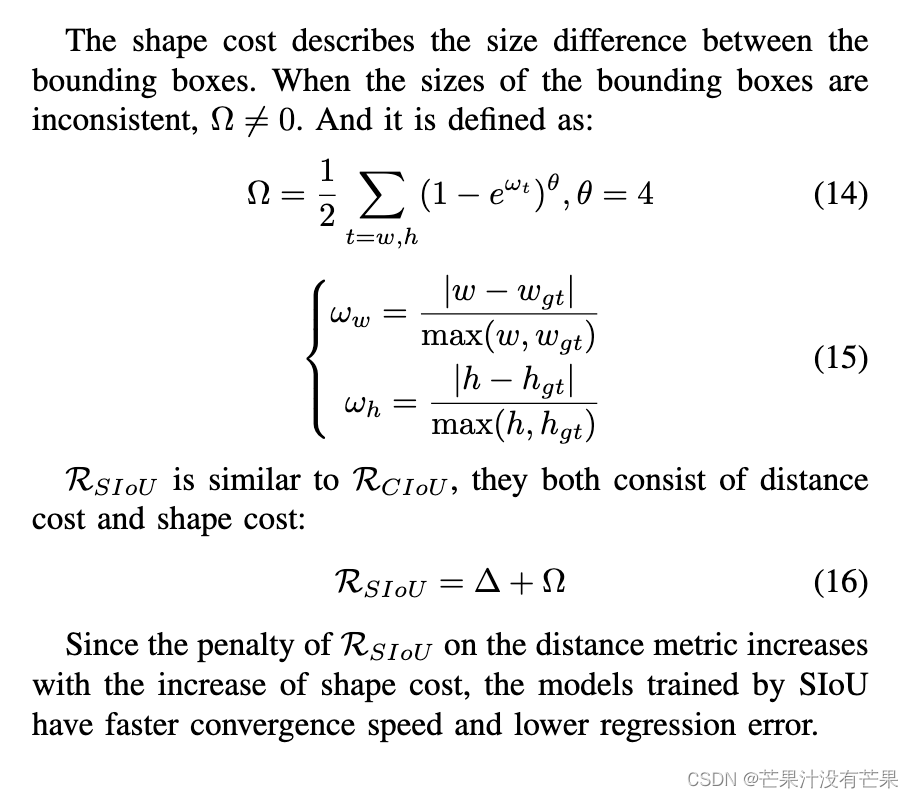
- Zhora Gevorgyan [18] 证明了中心-对齐的anchor box会有更快的收敛速度,并根据角度成本、距离成本和形状成本构造了SIoU。
论文方法
- 从 focal loss 中学习:
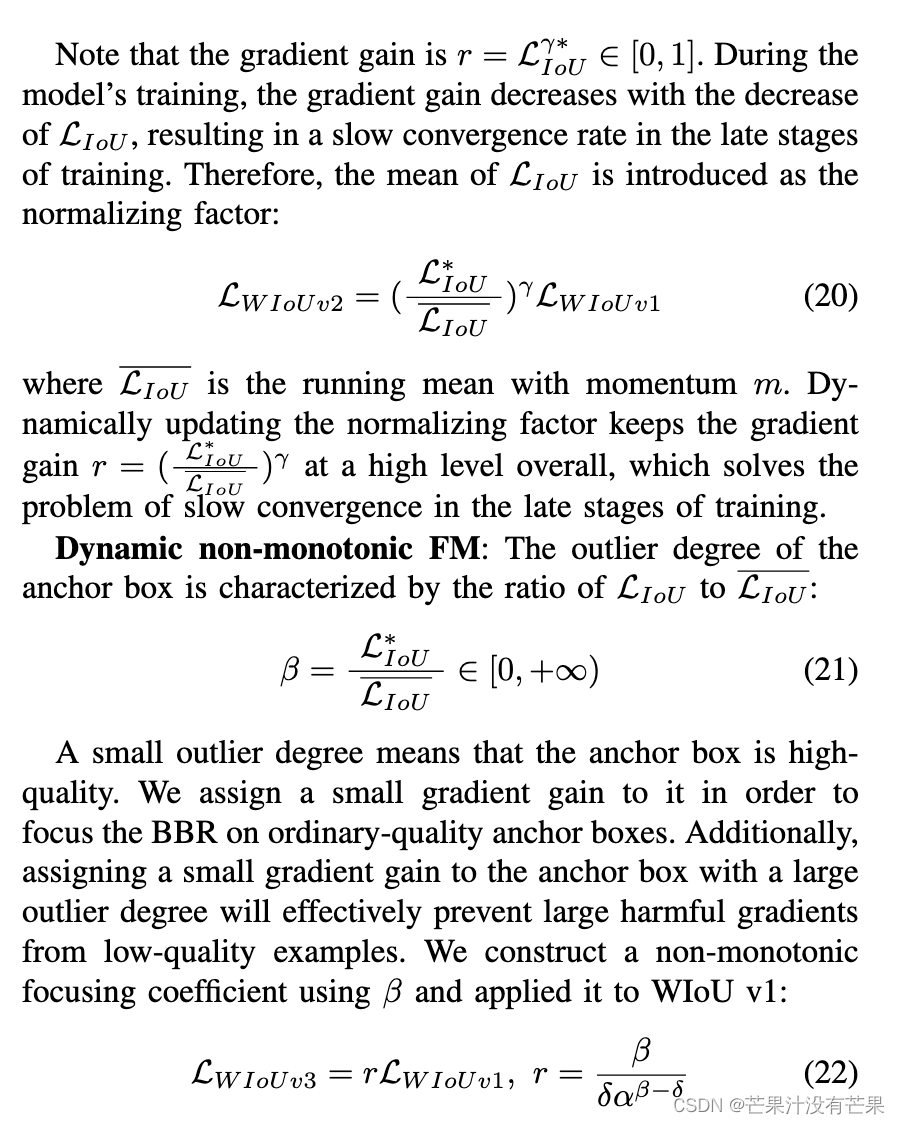
Focal loss [20] 设计了一个交叉熵的单调FM,有效降低简单示例对损失值的贡献。 就这样模型可以专注于困难的例子并获得分类性能改进。 同样,我们构造单调的聚焦系数 Lγ* LW IoU v1 的 IoU
论文实验
消融实验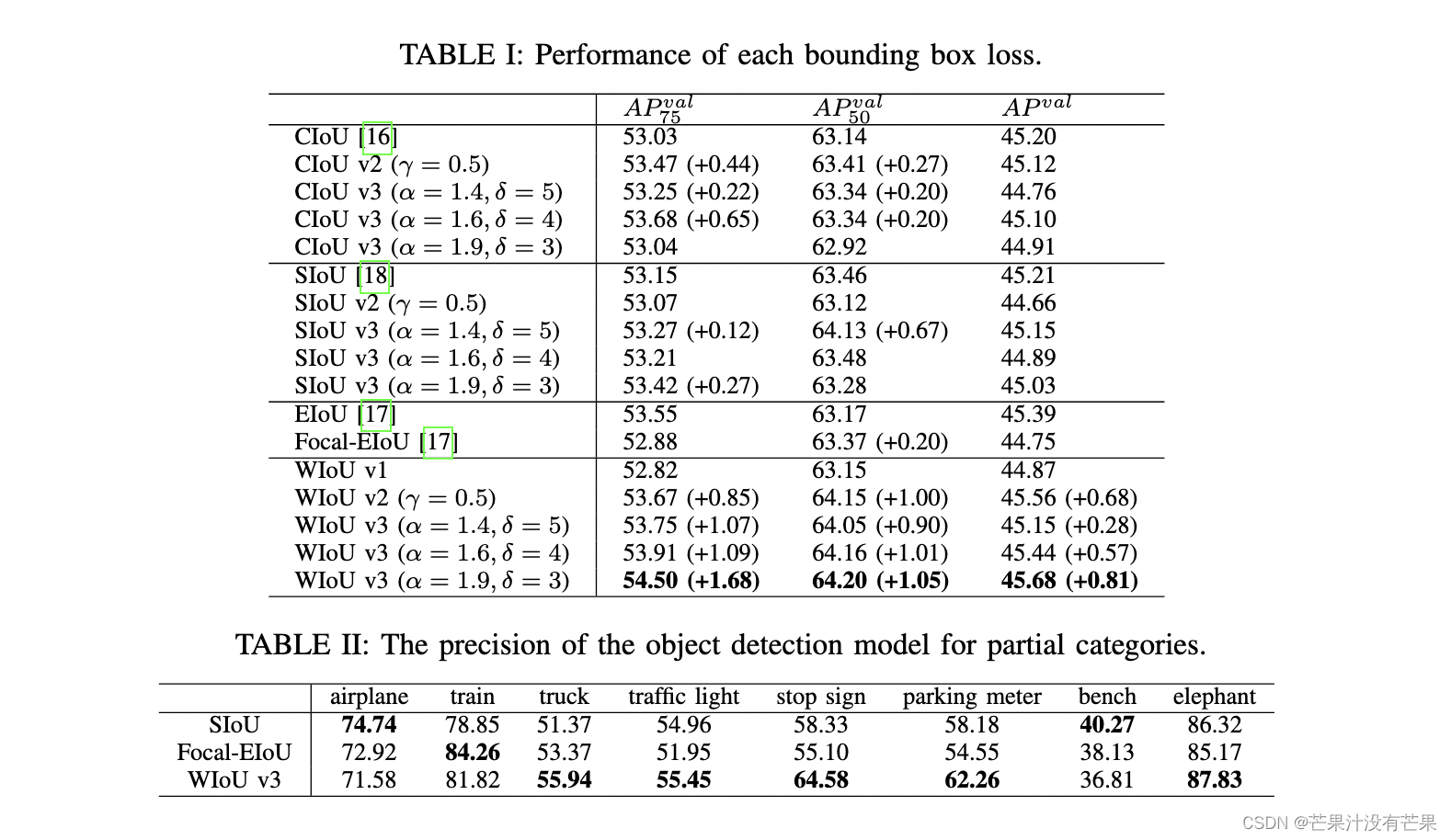
消融实验分析
在表一中,BBR损失的原始版本的性能排名为:EIoU > SIoU > CIoU > WIoU v1。这样的命令也符合对距离度量的惩罚的强度。然而,当应用FMs时,BBR损失的性能增益的顺序则相反。在进行的实验中,由WIoU v3训练的模型取得了最好的性能。
更多论文细节,可以查看作者的原论文
一、 代码| 将 Wise-IoU 应用到YOLOv12
🥇🥇🥇
添加博主联系方式:
已订阅专栏用户可以添加博主QQ: 2434798737, 可以拉友好的读者进 芒果YOLOv12改进专栏交流群
🚀🚀🚀
改进核心代码(Wise-IoU + YOLOv12)
新增部分
在ultralytics.yolo.utils文件下面,新增一个wiou.py文件, 增加以下代码
import math
import torch
red = 'orangered'
orange = 'darkorange'
yellow = 'gold'
green = 'greenyellow'
cyan = 'aqua'
blue = 'deepskyblue'
purple = 'mediumpurple'
pink = 'violet'
COLORS = [purple, blue, green, yellow, orange]
def xywh_to_ltrb(attr):
attr[..., :2] -= attr[..., 2: 4] / 2
attr[..., 2: 4] += attr[..., :2]
return attr
def ltrb_to_xywh(attr):
attr[..., 2: 4] -= attr[..., :2]
attr[..., :2] += attr[..., 2: 4] / 2
return attr
class IoU_Cal:
''' pred, target: x0,y0,x1,y1
monotonous: {
None: origin
True: monotonic FM
False: non-monotonic FM
}
momentum: The momentum of running mean'''
iou_mean = 1.
monotonous = False
momentum = 1 - pow(0.5, exp=1 / 7000)
# 如果有File "C:/yolov7-main\utils\iouc.py", line 38, in IoU_Cal momentum = 1 - pow(0.5, exp=1 / 7000) TypeError: pow() takes no keyword arguments类似的报错改成下面的
# momentum = 1 - 0.5 ** (1 / 7000)
_is_train = True
def __init__(self, pred, target):
self.pred, self.target = pred, target
self._fget = {
# x,y,w,h
'pred_xy': lambda: (self.pred[..., :2] + self.pred[..., 2: 4]) / 2,
'pred_wh': lambda: self.pred[..., 2: 4] - self.pred[..., :2],
'target_xy': lambda: (self.target[..., :2] + self.target[..., 2: 4]) / 2,
'target_wh': lambda: self.target[..., 2: 4] - self.target[..., :2],
# x0,y0,x1,y1
'min_coord': lambda: torch.minimum(self.pred[..., :4], self.target[..., :4]),
'max_coord': lambda: torch.maximum(self.pred[..., :4], self.target[..., :4]),
# The overlapping region
'wh_inter': lambda: self.min_coord[..., 2: 4] - self.max_coord[..., :2],
's_inter': lambda: torch.prod(torch.relu(self.wh_inter), dim=-1),
# The area covered
's_union': lambda: torch.prod(self.pred_wh, dim=-1) +
torch.prod(self.target_wh, dim=-1) - self.s_inter,
# The smallest enclosing box
'wh_box': lambda: self.max_coord[..., 2: 4] - self.min_coord[..., :2],
's_box': lambda: torch.prod(self.wh_box, dim=-1),
'l2_box': lambda: torch.square(self.wh_box).sum(dim=-1),
# The central points' connection of the bounding boxes
'd_center': lambda: self.pred_xy - self.target_xy,
'l2_center': lambda: torch.square(self.d_center).sum(dim=-1),
# IoU
'iou': lambda: 1 - self.s_inter / self.s_union
}
self._update(self)
def __setitem__(self, key, value):
self._fget[key] = value
def __getattr__(self, item):
if callable(self._fget[item]):
self._fget[item] = self._fget[item]()
return self._fget[item]
@classmethod
def train(cls):
cls._is_train = True
@classmethod
def eval(cls):
cls._is_train = False
@classmethod
def _update(cls, self):
if cls._is_train: cls.iou_mean = (1 - cls.momentum) * cls.iou_mean + \
cls.momentum * self.iou.detach().mean().item()
def _scaled_loss(self, loss, gamma=1.9, delta=3):
if isinstance(self.monotonous, bool):
if self.monotonous:
loss *= (self.iou.detach() / self.iou_mean).sqrt()
else:
beta = self.iou.detach() / self.iou_mean
alpha = delta * torch.pow(gamma, beta - delta)
loss *= beta / alpha
return loss
@classmethod
def IoU(cls, pred, target, self=None):
self = self if self else cls(pred, target)
return self.iou
@classmethod
def WIoU(cls, pred, target, self=None):
self = self if self else cls(pred, target)
dist = torch.exp(self.l2_center / self.l2_box.detach())
return self._scaled_loss(dist * self.iou)
修改部分
PS:友好的专栏读者 还没加群的可以私信博主加群
修改步骤0
将ultralytics/yolo/utils/metrics.py文件下的bbox_iou函数替换如下
def bbox_iou(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, WIoU=False, eps=1e-7):
"""
Calculate Intersection over Union (IoU) of box1(1, 4) to box2(n, 4).
Args:
box1 (torch.Tensor): A tensor representing a single bounding box with shape (1, 4).
box2 (torch.Tensor): A tensor representing n bounding boxes with shape (n, 4).
xywh (bool, optional): If True, input boxes are in (x, y, w, h) format. If False, input boxes are in
(x1, y1, x2, y2) format. Defaults to True.
GIoU (bool, optional): If True, calculate Generalized IoU. Defaults to False.
DIoU (bool, optional): If True, calculate Distance IoU. Defaults to False.
CIoU (bool, optional): If True, calculate Complete IoU. Defaults to False.
eps (float, optional): A small value to avoid division by zero. Defaults to 1e-7.
Returns:
(torch.Tensor): IoU, GIoU, DIoU, or CIoU values depending on the specified flags.
"""
# Get the coordinates of bounding boxes
if xywh: # transform from xywh to xyxy
(x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, -1), box2.chunk(4, -1)
w1_, h1_, w2_, h2_ = w1 / 2, h1 / 2, w2 / 2, h2 / 2
b1_x1, b1_x2, b1_y1, b1_y2 = x1 - w1_, x1 + w1_, y1 - h1_, y1 + h1_
b2_x1, b2_x2, b2_y1, b2_y2 = x2 - w2_, x2 + w2_, y2 - h2_, y2 + h2_
else: # x1, y1, x2, y2 = box1
b1_x1, b1_y1, b1_x2, b1_y2 = box1.chunk(4, -1)
b2_x1, b2_y1, b2_x2, b2_y2 = box2.chunk(4, -1)
w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + eps
w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps
# Intersection area
inter = (b1_x2.minimum(b2_x2) - b1_x1.maximum(b2_x1)).clamp_(0) * \
(b1_y2.minimum(b2_y2) - b1_y1.maximum(b2_y1)).clamp_(0)
# Union Area
union = w1 * h1 + w2 * h2 - inter + eps
# IoU
iou = inter / union
if CIoU or DIoU or GIoU or WIoU:
cw = b1_x2.maximum(b2_x2) - b1_x1.minimum(b2_x1) # convex (smallest enclosing box) width
ch = b1_y2.maximum(b2_y2) - b1_y1.minimum(b2_y1) # convex height
if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
c2 = cw ** 2 + ch ** 2 + eps # convex diagonal squared
rho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 + (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center dist ** 2
if CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
v = (4 / math.pi ** 2) * (torch.atan(w2 / h2) - torch.atan(w1 / h1)).pow(2)
with torch.no_grad():
alpha = v / (v - iou + (1 + eps))
return iou - (rho2 / c2 + v * alpha) # CIoU
return iou - rho2 / c2 # DIoU
elif WIoU:
from ultralytics.yolo.utils.wiou import IoU_Cal
b1 = torch.stack([b1_x1, b1_y1, b1_x2, b1_y2], dim=-1)
b2 = torch.stack([b2_x1, b2_y1, b2_x2, b2_y2], dim=-1)
self = IoU_Cal(b1, b2)
loss = getattr(IoU_Cal, 'WIoU')(b1, b2, self=self)
iou = 1 - self.iou
return loss, iou
c_area = cw * ch + eps # convex area
return iou - (c_area - union) / c_area # GIoU https://arxiv.org/pdf/1902.09630.pdf
return iou # IoU
修改步骤1
在ultralytics/yolo/utils/loss.py文件中
在class BboxLoss(nn.Module):内部:
将
iou = bbox_iou(pred_bboxes[fg_mask], target_bboxes[fg_mask], xywh=False, CIoU=True)
loss_iou = ((1.0 - iou) * weight).sum() / target_scores_sum
改为
loss, iou = bbox_iou(pred_bboxes[fg_mask], target_bboxes[fg_mask], xywh=False, WIoU=True)
loss_iou = (loss * weight).sum() / target_scores_sum
YOLOv12网络配置文件
YOLOv12s网络配置文件 (自带)
### YOLOv5网络配置文件
```python
# Ultralytics YOLO 🚀, GPL-3.0 license
# Parameters
nc: 80 # number of classes
depth_multiple: 0.33 # scales module repeats
width_multiple: 0.25 # scales convolution channels
# YOLOv12.0n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4
- [-1, 3, C2f, [128, True]]
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
- [-1, 6, C2f, [256, True]]
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
- [-1, 6, C2f, [512, True]]
- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32
- [-1, 3, C2f, [1024, True]]
- [-1, 1, SPPF, [1024, 5]] # 9
# YOLOv12.0n head
head:
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 6], 1, Concat, [1]] # cat backbone P4
- [-1, 3, C2f, [512]] # 12
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 4], 1, Concat, [1]] # cat backbone P3
- [-1, 3, C2f, [256]] # 15 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 12], 1, Concat, [1]] # cat head P4
- [-1, 3, C2f, [512]] # 18 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]]
- [[-1, 9], 1, Concat, [1]] # cat head P5
- [-1, 3, C2f, [1024]] # 21 (P5/32-large)
- [[15, 18, 21], 1, Detect, [nc]] # Detect(P3, P4, P5)
运行训练命令
运行以下命令即可
python train.py --YOLOv12.yaml
注
以上内容可以忽略
附录: SIoU、EIoU、GIoU、α-IoU改进
以下SIoU、EIoU、GIoU、α-IoU改进作为附录,代码均在博主开源的https://github1s.com/iscyy/yoloair/blob/HEAD/utils/metrics.py 中有写
核心代码
使用以下函数替换原有的ultralytics/utils/loss.py文件中的bbox_iou函数
def bbox_iou(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, EIoU=False, SIoU=False, eps=1e-7):
# Returns the IoU of box1 to box2. box1 is 4, box2 is nx4
box2 = box2.T
# Get the coordinates of bounding boxes
if xywh: # transform from xywh to xyxy
(x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, -1), box2.chunk(4, -1)
w1_, h1_, w2_, h2_ = w1 / 2, h1 / 2, w2 / 2, h2 / 2
b1_x1, b1_x2, b1_y1, b1_y2 = x1 - w1_, x1 + w1_, y1 - h1_, y1 + h1_
b2_x1, b2_x2, b2_y1, b2_y2 = x2 - w2_, x2 + w2_, y2 - h2_, y2 + h2_
else: # x1, y1, x2, y2 = box1
b1_x1, b1_y1, b1_x2, b1_y2 = box1.chunk(4, -1)
b2_x1, b2_y1, b2_x2, b2_y2 = box2.chunk(4, -1)
w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + eps
w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps
# Intersection area
inter = (b1_x2.minimum(b2_x2) - b1_x1.maximum(b2_x1)).clamp_(0) * (
b1_y2.minimum(b2_y2) - b1_y1.maximum(b2_y1)
).clamp_(0)
union = w1 * h1 + w2 * h2 - inter + eps
iou = inter / union
if CIoU or DIoU or GIoU or EIoU or SIoU:
cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width
ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height
if CIoU or DIoU or EIoU or SIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
c2 = cw ** 2 + ch ** 2 + eps # convex diagonal squared
rho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 +
(b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center distance squared
if DIoU: #DIoU
return iou - rho2 / c2 # DIoU
elif CIoU: #CIoU https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / h2) - torch.atan(w1 / h1), 2)
with torch.no_grad():
alpha = v / (v - iou + (1 + eps))
return iou - (rho2 / c2 + v * alpha) # CIoU
elif SIoU:# SIoU
s_cw = (b2_x1 + b2_x2 - b1_x1 - b1_x2) * 0.5
s_ch = (b2_y1 + b2_y2 - b1_y1 - b1_y2) * 0.5
sigma = torch.pow(s_cw ** 2 + s_ch ** 2, 0.5)
sin_alpha_1 = torch.abs(s_cw) / sigma
sin_alpha_2 = torch.abs(s_ch) / sigma
threshold = pow(2, 0.5) / 2
sin_alpha = torch.where(sin_alpha_1 > threshold, sin_alpha_2, sin_alpha_1)
angle_cost = torch.cos(torch.arcsin(sin_alpha) * 2 - math.pi / 2)
rho_x = (s_cw / cw) ** 2
rho_y = (s_ch / ch) ** 2
gamma = angle_cost - 2
distance_cost = 2 - torch.exp(gamma * rho_x) - torch.exp(gamma * rho_y)
omiga_w = torch.abs(w1 - w2) / torch.max(w1, w2)
omiga_h = torch.abs(h1 - h2) / torch.max(h1, h2)
shape_cost = torch.pow(1 - torch.exp(-1 * omiga_w), 4) + torch.pow(1 - torch.exp(-1 * omiga_h), 4)
return iou - 0.5 * (distance_cost + shape_cost)
else:# EIoU
w_dis=torch.pow(b1_x2-b1_x1-b2_x2+b2_x1, 2)
h_dis=torch.pow(b1_y2-b1_y1-b2_y2+b2_y1, 2)
cw2=torch.pow(cw , 2)+eps
ch2=torch.pow(ch , 2)+eps
return iou-(rho2/c2+w_dis/cw2+h_dis/ch2)
else:
c_area = cw * ch + eps # convex area
return iou - (c_area - union) / c_area # GIoU https://arxiv.org/pdf/1902.09630.pdf
return iou # IoU
α-IoU核心代码
def bbox_alpha_iou(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, alpha=2, eps=1e-9):
# Returns tsqrt_he IoU of box1 to box2. box1 is 4, box2 is nx4
box2 = box2.T
# Get the coordinates of bounding boxes
if xywh: # transform from xywh to xyxy
(x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, -1), box2.chunk(4, -1)
w1_, h1_, w2_, h2_ = w1 / 2, h1 / 2, w2 / 2, h2 / 2
b1_x1, b1_x2, b1_y1, b1_y2 = x1 - w1_, x1 + w1_, y1 - h1_, y1 + h1_
b2_x1, b2_x2, b2_y1, b2_y2 = x2 - w2_, x2 + w2_, y2 - h2_, y2 + h2_
else: # x1, y1, x2, y2 = box1
b1_x1, b1_y1, b1_x2, b1_y2 = box1.chunk(4, -1)
b2_x1, b2_y1, b2_x2, b2_y2 = box2.chunk(4, -1)
w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + eps
w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps
# Intersection area
inter = (b1_x2.minimum(b2_x2) - b1_x1.maximum(b2_x1)).clamp_(0) * (
b1_y2.minimum(b2_y2) - b1_y1.maximum(b2_y1)
).clamp_(0)
union = w1 * h1 + w2 * h2 - inter + eps
# change iou into pow(iou+eps)
# iou = inter / union
iou = torch.pow(inter/union + eps, alpha)
# beta = 2 * alpha
if GIoU or DIoU or CIoU:
cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width
ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height
if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
c2 = (cw ** 2 + ch ** 2) ** alpha + eps # convex diagonal
rho_x = torch.abs(b2_x1 + b2_x2 - b1_x1 - b1_x2)
rho_y = torch.abs(b2_y1 + b2_y2 - b1_y1 - b1_y2)
rho2 = ((rho_x ** 2 + rho_y ** 2) / 4) ** alpha # center distance
if DIoU:
return iou - rho2 / c2 # DIoU
elif CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / h2) - torch.atan(w1 / h1), 2)
with torch.no_grad():
alpha_ciou = v / ((1 + eps) - inter / union + v)
# return iou - (rho2 / c2 + v * alpha_ciou) # CIoU
return iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)) # CIoU
else: # GIoU https://arxiv.org/pdf/1902.09630.pdf
# c_area = cw * ch + eps # convex area
# return iou - (c_area - union) / c_area # GIoU
c_area = torch.max(cw * ch + eps, union) # convex area
return iou - torch.pow((c_area - union) / c_area + eps, alpha) # GIoU
else:
return iou # torch.log(iou+eps) or iou
SIoU改进
参考上面的核心代码
将
iou = bbox_iou(pred_bboxes[fg_mask], target_bboxes[fg_mask], xywh=False, CIoU=True)
替换为
iou = bbox_iou(pred_bboxes[fg_mask], target_bboxes[fg_mask], xywh=False, SIoU=True)
EIoU改进
参考上面的核心代码
将
iou = bbox_iou(pred_bboxes[fg_mask], target_bboxes[fg_mask], xywh=False, CIoU=True)
替换为
iou = bbox_iou(pred_bboxes[fg_mask], target_bboxes[fg_mask], xywh=False, EIoU=True)
GIoU改进
参考上面的核心代码
将
iou = bbox_iou(pred_bboxes[fg_mask], target_bboxes[fg_mask], xywh=False, CIoU=True)
替换为
iou = bbox_iou(pred_bboxes[fg_mask], target_bboxes[fg_mask], xywh=False, GIoU=True)
α-IoU改进
参考上面的核心代码
bbox_alpha_iou
将
iou = bbox_iou(pred_bboxes[fg_mask], target_bboxes[fg_mask], xywh=False, CIoU=True)
替换为
iou = bbox_alpha_iou(pred_bboxes[fg_mask], target_bboxes[fg_mask], xywh=False, CIoU=True)

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 13
13 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)