探索改进A星算法路径规划:从细节优化到邻域拓展
改进A星算法路径规划1.删去离障碍物太近的节点2.引入启发函数动态权重3.冗余点处理以及接5*5邻域(16邻域),7*7邻域(32邻域)等改进A星在路径规划领域,A星算法堪称经典,但随着实际应用场景复杂度的提升,对其进行改进显得尤为必要。今天咱们就来唠唠几种对A星算法的优化思路,包括节点筛选、启发函数调整、冗余点处理,以及不同邻域设置带来的改进。
改进A星算法路径规划 1.删去离障碍物太近的节点 2.引入启发函数动态权重 3.冗余点处理 以及接5*5邻域(16邻域),7*7邻域(32邻域)等改进A星
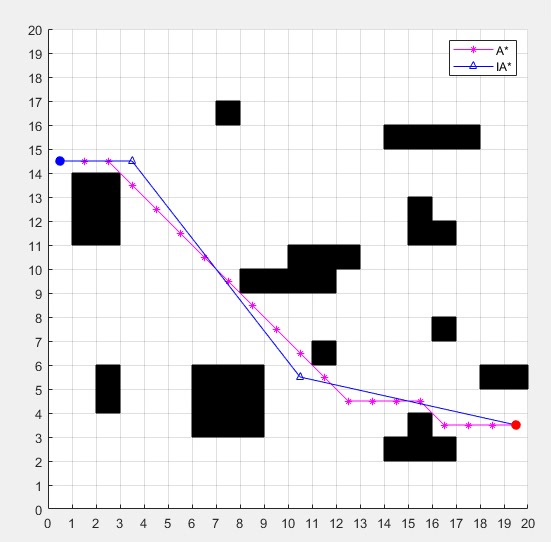
在路径规划领域,A星算法堪称经典,但随着实际应用场景复杂度的提升,对其进行改进显得尤为必要。今天咱们就来唠唠几种对A星算法的优化思路,包括节点筛选、启发函数调整、冗余点处理,以及不同邻域设置带来的改进。
一、删去离障碍物太近的节点
在实际场景中,靠近障碍物的节点往往不是最优路径的选择,甚至可能把算法引入死胡同。通过提前筛除这些节点,可以大大减少算法的搜索空间,提升效率。
假设我们有一个表示地图的二维数组map,值为1表示障碍物,0表示可通行区域。以下是简单的Python代码示例,用于判断节点是否离障碍物太近:
def is_close_to_obstacle(node, map, threshold):
x, y = node
rows, cols = len(map), len(map[0])
for i in range(max(0, x - threshold), min(rows, x + threshold + 1)):
for j in range(max(0, y - threshold), min(cols, y + threshold + 1)):
if map[i][j] == 1:
return True
return False在A星算法搜索节点时,就可以调用这个函数:
# 在A星算法的节点生成过程中
new_node = (x, y)
if not is_close_to_obstacle(new_node, map, 2): # 这里阈值设为2
# 将new_node加入待扩展节点列表
open_list.append(new_node)分析:上述代码通过双重循环遍历以当前节点为中心,边长为2 * threshold + 1的方形区域,检查是否存在障碍物。如果存在,说明该节点离障碍物太近,应被舍弃。
二、引入启发函数动态权重
启发函数在A星算法中用于引导搜索方向,传统的启发函数权重往往是固定的。但在一些复杂环境中,固定权重无法灵活适应不同的地形或需求。引入动态权重可以让启发函数根据实际情况调整。
假设我们有一个简单的启发函数heuristic,通常使用曼哈顿距离或欧几里得距离。现在,我们让权重weight根据节点与目标点的距离动态变化:
import math
def heuristic(node, goal, weight):
x1, y1 = node
x2, y2 = goal
return weight * math.sqrt((x2 - x1) ** 2 + (y2 - y1) ** 2) # 这里用欧几里得距离举例在A星算法中,我们根据节点与目标点的距离动态调整权重:
# 在A星算法计算节点代价时
distance_to_goal = heuristic(current_node, goal, 1)
if distance_to_goal > some_threshold:
weight = 1.5
else:
weight = 1
f_value = g_value + heuristic(current_node, goal, weight)分析:上述代码中,当节点离目标点较远时,增加启发函数的权重,让算法更倾向于朝着目标点快速搜索;当节点离目标点较近时,减小权重,使算法更注重局部最优解,避免错过最优路径。
三、冗余点处理
在A星算法生成的路径中,可能存在一些冗余点,这些点对于路径的连通性没有实质影响,但会增加路径长度和计算量。
一种简单的冗余点处理方法是使用“直线检测”。假设我们有一条路径path,由一系列节点组成:
def remove_redundant_points(path):
new_path = [path[0]]
for i in range(2, len(path)):
p1 = path[i - 2]
p2 = path[i - 1]
p3 = path[i]
if (p3[1] - p1[1]) * (p2[0] - p1[0])!= (p2[1] - p1[1]) * (p3[0] - p1[0]):
new_path.append(path[i - 1])
new_path.append(path[-1])
return new_path分析:这段代码通过判断三个连续节点是否共线来决定是否删除中间节点。如果不共线,则保留中间节点,否则说明该节点是冗余的,可被删除。这样可以在不改变路径连通性的前提下,简化路径。
四、5*5邻域(16邻域),7*7邻域(32邻域)等改进A星
传统A星算法通常使用4邻域(上下左右)或8邻域(包括对角线)进行节点扩展。而增加邻域范围,如55邻域(16邻域,除去中心节点本身)或77邻域(32邻域,除去中心节点本身),可以让算法在搜索时拥有更多选择,可能找到更优路径。
以5*5邻域为例,生成邻域节点的代码如下:
def get_5x5_neighbors(node):
x, y = node
neighbors = []
for i in range(x - 2, x + 3):
for j in range(y - 2, y + 3):
if (i, j)!= node and 0 <= i < rows and 0 <= j < cols:
neighbors.append((i, j))
return neighbors在A星算法扩展节点时,使用这个函数替换原来的邻域获取函数:
# 在A星算法扩展节点步骤
current_node = open_list.pop(0)
neighbors = get_5x5_neighbors(current_node)
for neighbor in neighbors:
if neighbor not in closed_set:
# 计算邻居节点的g、h、f值,并加入open_list分析:通过扩大邻域范围,算法在每一步搜索时有更多的节点可供选择,增加了找到更优路径的可能性。但同时,由于需要处理更多的节点,计算量也会相应增加,所以在实际应用中需要权衡计算资源和路径优化程度。
通过以上几种改进,A星算法在复杂环境下的路径规划能力得到显著提升,无论是搜索效率还是路径质量都有可观的改善。希望这些思路能给大家在相关领域的应用开发带来一些启发。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 19
19 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)