电动车辆路径规划算法EVRP优化
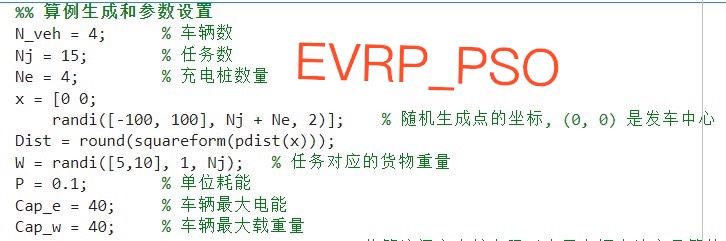
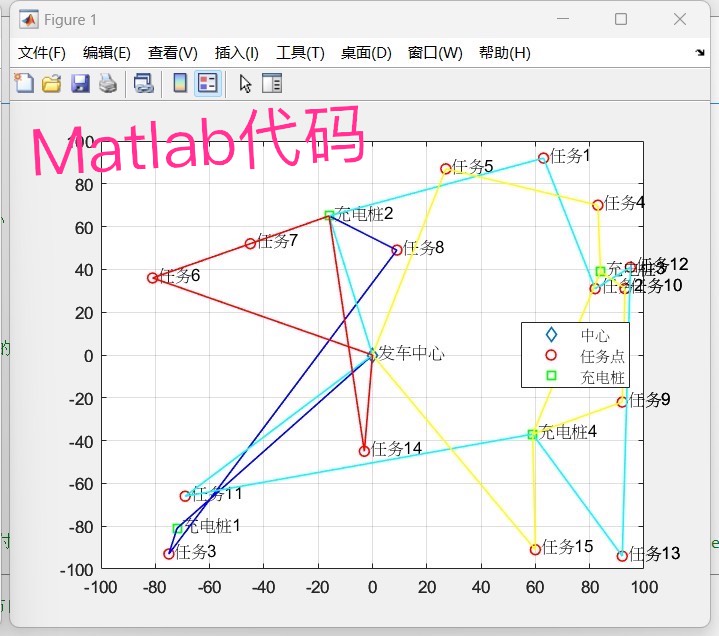
车辆路径规划问题VRP,电动车辆路径规划算法EVRP,粒子群算法PSO求解。 考虑车辆电量,载重容量,充电桩充电的车辆路径规划vrp;同时考虑(1)车辆最大电能;(2)车辆最大载重量两个因素 车辆由发车中心发出,途中,任务货物重量不能超过车辆最大载重,同时车辆电能不足时需要去充电桩充电,优化目标:总行程能耗
在物流和运输领域,车辆路径规划(VRP)一直是个热门话题。尤其是当我们把电动车(EV)引入这个方程时,问题就变得更加复杂了。这就是电动车辆路径规划(EVRP)的由来。今天,我们就来聊聊如何用粒子群算法(PSO)来解决这个问题,同时考虑车辆的电量和载重容量。
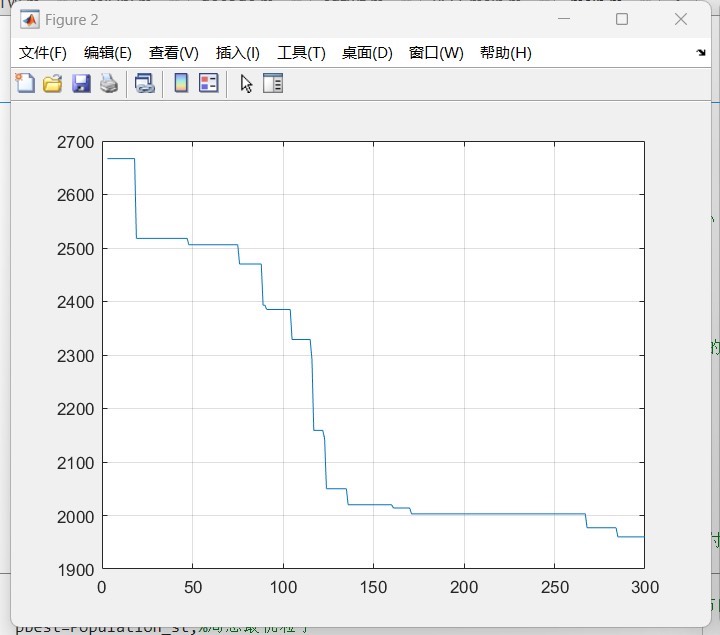
首先,我们得明确几个关键点:车辆的最大电能和最大载重量。这两个因素直接影响到车辆的行驶路线和效率。我们的目标是优化总行程能耗,也就是说,找到一条既能完成任务,又尽可能节省电量的路线。

让我们从基础开始,定义一个简单的车辆类:
class Vehicle:
def __init__(self, max_energy, max_load):
self.max_energy = max_energy
self.max_load = max_load
self.current_energy = max_energy
self.current_load = 0这个类有两个主要属性:maxenergy和maxload,分别代表车辆的最大电能和最大载重量。currentenergy和currentload则是当前的电量和载重。
接下来,我们需要考虑充电桩的位置和充电效率。假设我们有一个充电桩类:
class ChargingStation:
def __init__(self, location, charging_rate):
self.location = location
self.charging_rate = charging_ratelocation是充电桩的位置,charging_rate是充电速度。
现在,我们有了车辆和充电桩,接下来就是路径规划的核心部分。这里我们使用粒子群算法(PSO)来寻找最优路径。PSO是一种基于群体智能的优化算法,通过模拟鸟群觅食的过程来寻找最优解。
车辆路径规划问题VRP,电动车辆路径规划算法EVRP,粒子群算法PSO求解。 考虑车辆电量,载重容量,充电桩充电的车辆路径规划vrp;同时考虑(1)车辆最大电能;(2)车辆最大载重量两个因素 车辆由发车中心发出,途中,任务货物重量不能超过车辆最大载重,同时车辆电能不足时需要去充电桩充电,优化目标:总行程能耗
首先,我们定义一个粒子类:
class Particle:
def __init__(self, position, velocity):
self.position = position
self.velocity = velocity
self.best_position = position
self.best_score = float('inf')position表示粒子的当前位置,velocity表示速度,bestposition和bestscore分别记录粒子历史上的最佳位置和对应的得分。
接下来,我们初始化一群粒子,并让它们开始搜索:
def initialize_particles(num_particles, num_dimensions):
particles = []
for _ in range(num_particles):
position = [random.uniform(0, 1) for _ in range(num_dimensions)]
velocity = [random.uniform(-1, 1) for _ in range(num_dimensions)]
particles.append(Particle(position, velocity))
return particlesnumparticles是粒子的数量,numdimensions是搜索空间的维度。
在每次迭代中,粒子会根据自身的历史最佳位置和群体最佳位置更新自己的速度和位置:
def update_particles(particles, global_best_position, inertia_weight, cognitive_weight, social_weight):
for particle in particles:
for i in range(len(particle.position)):
r1 = random.random()
r2 = random.random()
cognitive_component = cognitive_weight * r1 * (particle.best_position[i] - particle.position[i])
social_component = social_weight * r2 * (global_best_position[i] - particle.position[i])
particle.velocity[i] = inertia_weight * particle.velocity[i] + cognitive_component + social_component
particle.position[i] += particle.velocity[i]inertiaweight、cognitiveweight和social_weight是控制粒子行为的参数。
最后,我们需要一个评估函数来计算每条路径的总行程能耗:
def evaluate_path(path, vehicle, charging_stations):
total_energy_consumption = 0
current_energy = vehicle.max_energy
current_load = 0
for point in path:
distance = calculate_distance(point, vehicle.location)
energy_consumption = calculate_energy_consumption(distance, current_load)
if current_energy < energy_consumption:
nearest_station = find_nearest_charging_station(point, charging_stations)
distance_to_station = calculate_distance(point, nearest_station.location)
energy_to_station = calculate_energy_consumption(distance_to_station, current_load)
if current_energy < energy_to_station:
return float('inf') # Not enough energy to reach charging station
total_energy_consumption += energy_to_station
current_energy = nearest_station.charging_rate * (vehicle.max_energy - current_energy)
distance = calculate_distance(nearest_station.location, point)
energy_consumption = calculate_energy_consumption(distance, current_load)
total_energy_consumption += energy_consumption
current_energy -= energy_consumption
current_load += point.load
return total_energy_consumption这个函数会计算每条路径的总能耗,如果车辆在某个点电量不足,它会寻找最近的充电桩并计算充电后的能耗。
通过这种方式,我们可以用PSO算法来优化电动车的路径规划,确保在满足载重和电量限制的前提下,找到最节能的路线。当然,这只是一个基础的实现,实际应用中还需要考虑更多的因素,比如交通状况、充电桩的可用性等。不过,这个框架已经为我们提供了一个很好的起点。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 20
20 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)