视觉SLAM十四讲笔记(ch7)
第七讲 视觉里程计1
根据相邻图像的信息估算相机的运动称为视觉里程计(VO)。一般需要先提取两幅图像的特征点,然后进行匹配,根据匹配的特征点估计相机运动。从而给后端提供较为合理的初始值。
1. 特征点:特征检测算子SIFT,SURF,ORB等等。
SIFT算子比较“奢侈”,考虑的比较多,对于SLAM算法来说有点太“奢侈”。不太常用目前。
ORB算子是在FAST算子基础上发展起来,在特征点数量上精简了,而且加上了方向和旋转特性(通过求质心),并改进了尺度不变性(通过构建图像金字塔)。从而实现通过FAST提取特征点并计算主方向,通过BRIEF计算描述子的ORB算法。
2. 特征匹配:特征匹配精度将影响到后续的位姿估计、优化等。
根据提取的匹配点对,估计相机的运动。由于相机的不同,情况不同:
1.当相机为单目时,我们只知道2D的像素坐标,因而问题是根据两组2D点估计运动。该问题用对极几何来解决。2D-2D
2.当相机为双目、RGB-D时,或者我们通过某种方法得到了距离信息,那问题就是根据两组3D点估计运动。该问题通常用ICP来解决。3D-3D
3.如果我们有3D点和它们在相机的投影位置,也能估计相机的运动。该问题通过PnP求解。
分别来介绍。3D-2D
一、 对极几何
假设我们从两张图像中,得到了若干对这样的匹配点,就可以通过这些二维图像点的对应关系,恢复出在两帧之间摄像机的运动。
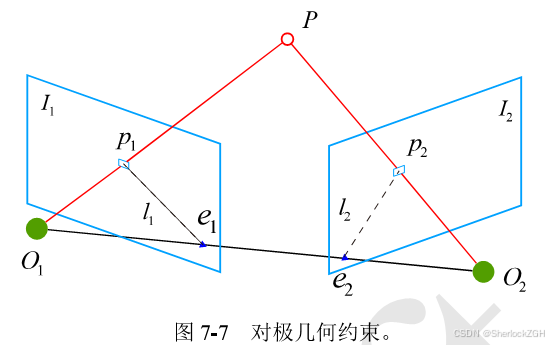
通过推导可得对极约束为:
![]()
其中,P1和P2表示像素坐标,K表示相机内参,t和R表示相机运动。该等式的几何意义为三角形O1PO2共面。可以将上式中间的参数合并为一个矩阵,即本质矩阵:
![]()
其中,x1和x2表示归一化平面坐标,当然可以将内参与本质矩阵合并得到基础矩阵:
![]()
本质矩阵
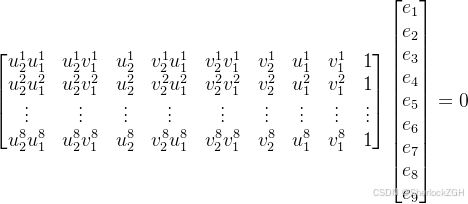
一般采用八点法求解E矩阵:
通过本质矩阵求解相机运动R,t的过程是由奇异值分解SVD得到的:
![]()
![]()
分解结果存在4个解,仅有两个相机中P点都是正深度才是正确的解。而一般情况下,得到的匹配特征点是远远多于8对匹配点的,所以可以采用最小二乘法或随机采样一致性求解E。
单应矩阵
描述了两个平面之间的映射关系,自由度为8的单应矩阵可以通过4对匹配特征点算出。
二、PnP
DLT
已知世界坐标系下P点坐标和在相机中投影点,则可根据下式进行求解相机运动:
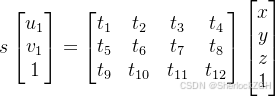
转换为线性方程为:
![]()
t有12个未知量,可通过6对匹配点,即可线性求解,超过6对时,可通过最小二乘求解。但由于t中未考虑的约束,所以t举证左边3X3的矩阵块需要进行近似化,即
![]()
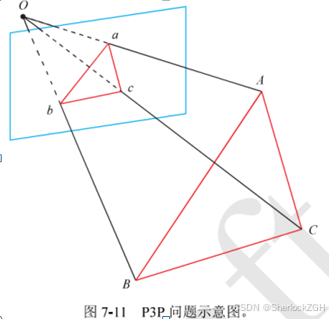
P3P
仅使用3对匹配点,可求得匹配点在该相机时刻下的坐标,接下来再使用ICP即可求出相机的相对运动。
最小重投影误差 BA
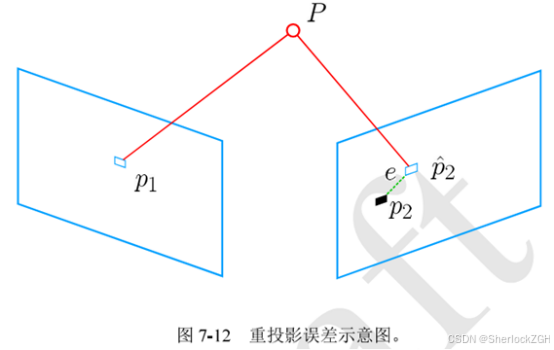
非线性优化方法,将相机位姿和路标坐标放在一起进行优化,像素坐标与空间点的位置关系如下:
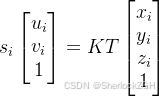
在pnp问题中,空间点位置已知,仅为优化相机位姿T的问题。构建最小二乘问题,寻找最好的相机位姿:
![]()
上式二范数中可记为误差项e(x),误差项表示3D的投影位置与观测位置做差,即重投影误差。此处,将会用到李代数进行优化,用到的知识点主要有ch4和ch6。由于优化的为相机位姿,所以误差项中的x为李代数ξ,对误差项线性化为:
接下来,需要推导出雅可比矩阵J的具体表达形式。
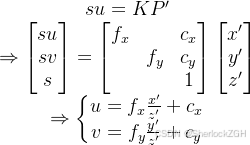
空间点坐标P在相机坐标系下的坐标P’为:
![]()
P’的像素坐标为:
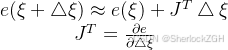
对T左乘扰动量,则e关于△ξ的求导如下:
![]()
其中,左边部分表示为误差项关于相机坐标系下坐标求偏微分,右边部分可转换为李代数求导。左边部分可表示为如下所示:
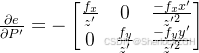
右边部分可表示为如下所示:
![]()
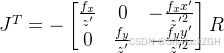
由此,可推到出JT为:

若se(3)旋转在前,平移在后,则需要将该矩阵前3列和后3列对调即可。
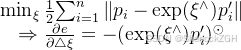
上面皆为对相机姿态T进行雅克比矩阵推导,同样也可用对路标点进行雅可比矩阵推导:
![]()
![]()
由此可推导出误差项关于路标点的雅克比矩阵:
三、ICP
假设有一组匹配好的3D点![]() 和
和![]() ,即可表示为:
,即可表示为:
![]()
3D-3D位姿估计问题中无需相机模型
ICP求解分为线性代数SVD和非线性优化方法BA
SVD
误差项可表示为:
![]()
对很多匹配点可进行最小二乘法求解位姿:

其中![]() ,
,![]() ,所以ICP在SVD方法下分为以下三个步骤:
,所以ICP在SVD方法下分为以下三个步骤:
- 计算每个点的去质心坐标:

- 在最小二乘表达式中,左边部分仅与R有关,所以可以先根据下式对R进行优化求解:
![]()
经过一系列推导可得:
![]()
设![]() ,对其进行SVD分解即可求出
,对其进行SVD分解即可求出![]() ,若R求得的行列式为负数,则取-R为最优值。
,若R求得的行列式为负数,则取-R为最优值。
根据计算得到了R,即可求出t:
![]()
非线性优化方法
非线性优化不断迭代求解最优值,ICP对初值的要求比较宽松,其实就是扰动模型:

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 11
11 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)