数据集标签_分享(二)丨LiDAR点云数据
图片来源于网络激光雷达技术(“光探测和测距”)在遥感界蓬勃发展,应用已较为广泛。例如空中激光扫描(ALS),可用于大规模建筑、道路和森林测量;地面激光扫描(TLS),可用于室内外环境中更详细但速度较慢的城市测量;移动激光扫描(MLS)精度比TLS低,但由于传感器安装在同一辆车上而具有更高的效率。图片来源于网络随着这些技术发展,近年来可用的三维地理数据和处理技术数量激增。针对三维城市点云的...
图片来源于网络
激光雷达技术(“光探测和测距”)在遥感界蓬勃发展,应用已较为广泛。例如空中激光扫描(ALS),可用于大规模建筑、道路和森林测量;地面激光扫描(TLS),可用于室内外环境中更详细但速度较慢的城市测量;移动激光扫描(MLS)精度比TLS低,但由于传感器安装在同一辆车上而具有更高的效率。

图片来源于网络
随着这些技术发展,近年来可用的三维地理数据和处理技术数量激增。针对三维城市点云的分析,已有许多半自动和自动的方法。这是一个有着良好发展前景的研究领域。然而,对于最佳的检测、分割和分类方法还没有达成共识。因此,小编推荐8个LiDAR数据集供大家使用,希望不断提出新的检测、分割和分类方法。
本期分享的LiDAR数据集如下:
1. WHU-TLS点云数据集
2. Oakland 3-D点云数据集
3. Paris-rue-Madame数据集
4. IQmulus & TerraMobilita数据集
5. District of Columbia数据集
6. semantic3d数据集
7. Paris-Lille-3D数据集
8. DublinCity数据集
 WHU-TLS点云数据集
WHU-TLS点云数据集
武汉大学空间智能研究所课题组结合近十年来的数据积累,联合慕尼黑工业大学、芬兰大地所、挪威科技大学、代尔夫特理工大学发布全球最大规模和最多样化场景类型的TLS点云配准基准数据集。
本次公开的WHU-TLS基准数据集涵盖了地铁站、高铁站、山地、森林、公园、校园、住宅、河岸、文化遗产建筑、地下矿道、隧道等11种不同的环境,共包含115个测站、17.4亿个三维点以及点云之间的真实转换矩阵。此外,该基准数据集也为铁路安全运营、河流勘测和治理、森林结构评估、文化遗产保护、滑坡监测和地下资产管理等应用提供了典型有效数据。
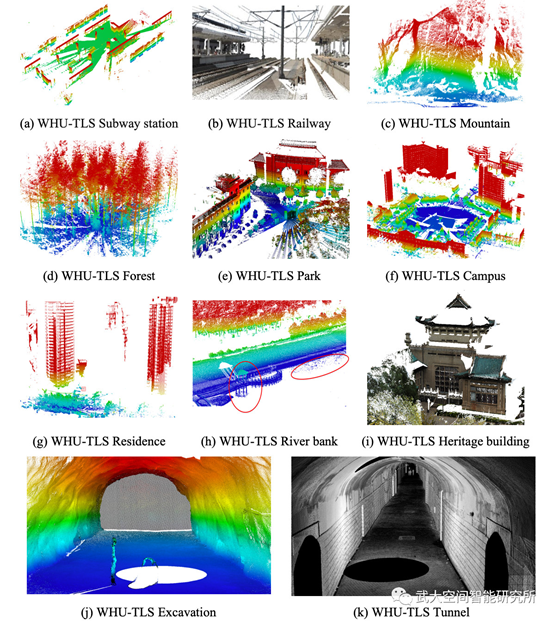
图1 WHU-TLS基准数据集
下载地址:
http://3s.whu.edu.cn/ybs/en/benchmark.htm
参考文献:
Dong Z., Liang F., Yang B., Xu Y., Zang Y., Li J., Wang Y., Dai W., Fan H., Liang X., Stilla U., 2020. Registration of large-scale TLS Point Clouds: A Review and Benchmark. ISPRS J. Photogramm. Remote Sens. (In press)
Oakland 3-D点云数据集
Oakland 3-D数据是使用Navlab11和侧视的LMS激光扫描仪收集的。数据采集点位于宾夕法尼亚州匹兹堡奥克兰市的芝加哥大学校园。数据以ascii格式提供:x, y, z标签置信度,每行一点,空格作为分隔符。还提供了相应的vrml文件(.wrl)和标签计数文件(.stats)。数据集由两个子集(part2,part3)组成,每个子集有自己的本地参考帧,其中每个文件包含10万个三维点。对训练集/验证集和测试集进行了筛选,并将其从44个标签重新映射到5个标签中。
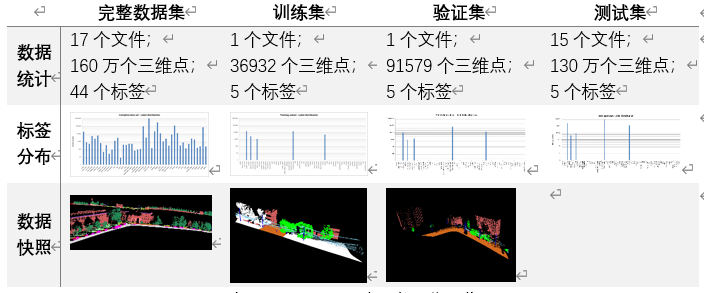
图2 Oakland 3-D点云数据集概览
下载地址:
http://www.cs.cmu.edu/~vmr/datasets/oakland_3d/cvpr09/doc/
参考文献:Daniel Munoz, J. Andrew (Drew) Bagnell, Nicolas Vandapel and Martial HebertConference Paper, Proceedings of IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR), June, 2009
Paris-rue-Madame数据集
Paris-rue-Madame数据集由三维移动激光扫描仪收集得到。数据收集于法国巴黎第六区的一个街道rue Madame,试验区包含从rue Mézières至rue Vaugirard的160 m长的街道;数据获取时间为2013年2月8日13:30。
该数据集是在TerraMobilita项目的框架下开发的。它是由位于法国普里斯帕里斯蒂奇矿山的机器人实验室(CAOR)的LARA2-3D三维激光扫描仪获得的。数据标注是由法国枫丹白露矿业中心(MINES ParisTech)的数学形态学中心(CMM)以人工辅助的方式进行的。
数据集包含两个ply文件,每个ply文件包含有1000万个点。每个文件包含一个点列表(x, y, z, reflective, label, class),其中x, y, z对应于Lambert 93和altitude IGN1969(grid RAF09)参考坐标系中的地理参考坐标(E, N, U),reflective是激光强度,label是分割后获得的对象标签,class是对象类别。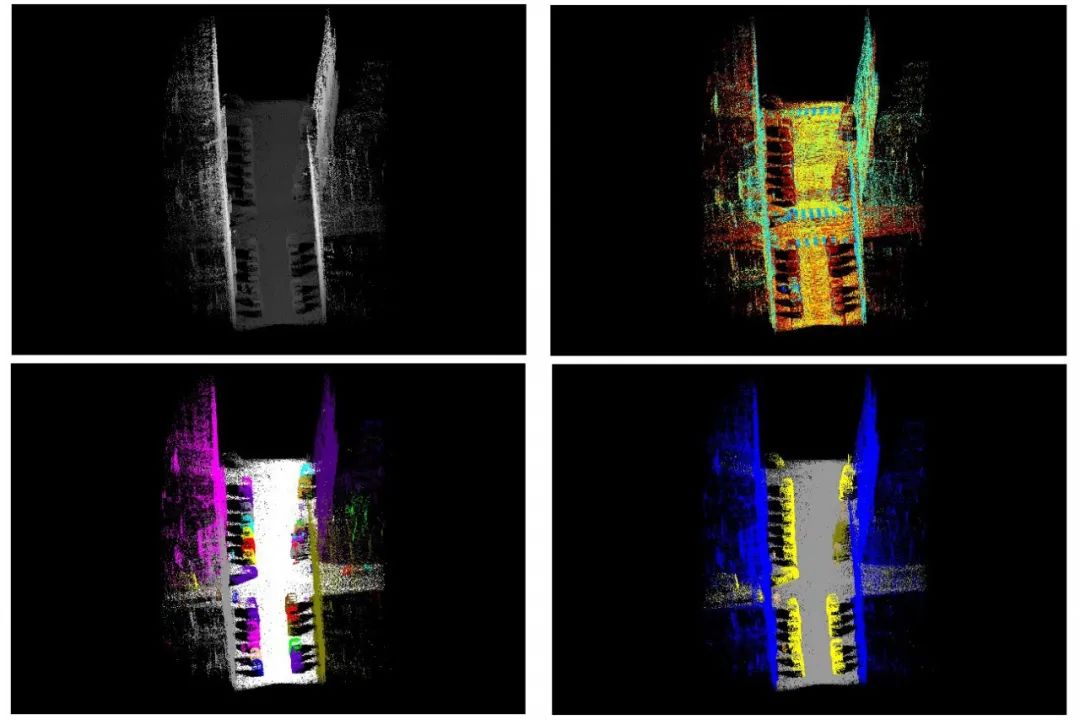
图3 GT_Madame1_2.ply文件点云的快照,由Z坐标值、反射率、对象标签和对象类着色。
下载地址:
http://www.cmm.mines-paristech.fr/~serna/rueMadameDataset.html
参考文献:A. Serna, B. Marcotegui, F. Goulette and J.-E. Deschaud "Paris-rue-Madame database: a 3D mobile laser scanner dataset for benchmarking urban detection, segmentation and classification methods". ICPRAM 2014.
IQmulus & TerraMobilita数据集
IQmulus & TerraMobilita数据集是一个比赛数据集,数据包含由3亿个三维点组成的点云数据,数据于2013年1月在法国的一个城市密集区域获取。该数据集是在iQmulus和TerraMobilita项目的框架下生成的。它由法国国家测绘局(IGN)开发的MLS系统Stereopolis II获取。数据标注由IGN的MATIS实验室以手动方式进行。
在这个数据集中,数据存储为ply文件格式,整个三维点云被分割和分类,即每个点包含一个标签和一个类。因此,检测分割分类方法的逐点评价成为可能。
所有坐标对应于Lambert 93和altitude IGN1969(grid RAF09)参考系统中的地理参考坐标(E, N, U),反射率为激光强度。已从XY坐标中减去偏移量,目的是提高数据精度。每个文件包含以下属性:
-
(float32) X, Y, Z:Lambert 93系统中的笛卡尔地理参考坐标
-
(float32) X, Y, Z:原始坐标
-
(float32) reflectance:后向散射强度校正距离
-
(uint8) num_echo:回声的数量(处理多个回声)
每个参与者提供的每个经过处理的文件一定是包含原始点的PLY文件(顺序相同),它们的原始属性和两个附加属性如下:
-
(uint32) id: 包含每个分段对象的唯一标识符/标签。
-
(uint32) class: 包含使用语义分类树中的标签对每个分段对象的分类结果。具有相同id的两点必须具有相同的类。
由于数据集的每个点都包含一个id和一个类,因此将以逐点的方式执行计算。
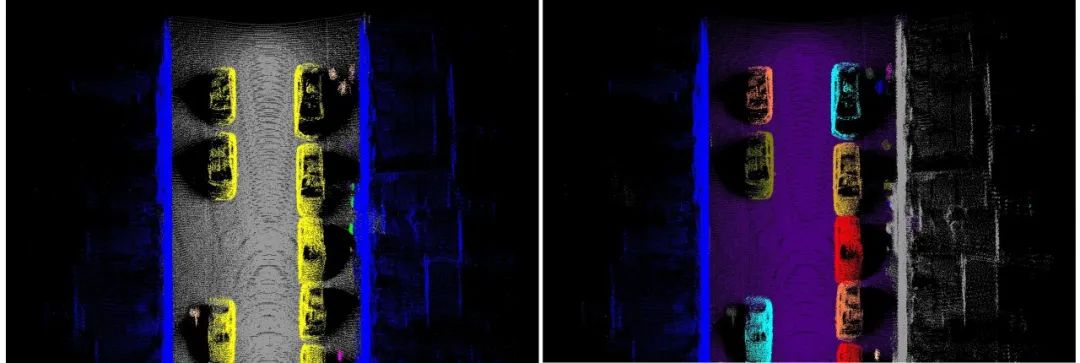
图4 数据标签(左)和类别(右)示例
下载地址:
http://data.ign.fr/benchmarks/UrbanAnalysis/
参考文献:Bruno Vallet, Mathieu Brédif, Andrés Serna, Beatriz Marcotegui, Nicolas Paparoditis. TerraMobilita/IQmulus urban point cloud analysis benchmark. Computers and Graphics, Elsevier, 2015, Computers and Graphics, 49, pp.126-133.
https://hal.archives-ouvertes.fr/hal-01167995v1
District of Columbia数据集
华盛顿的LiDAR点云数据可供任何人在Amazon S3上使用。该数据集由首席技术官办公室(OCTO)通过哥伦比亚特区地理信息系统计划管理,包含整个特区的平铺点云数据以及相关元数据。点云中的每个点都已根据以下模式进行了分类。
-
Class 1: Processed, but unclassified
-
Class 2: Bare earth
-
Class 7: Low noise
-
Class 9: Water
-
Class 10: Ignored ground
-
Class 11: Withheld
-
Class 17: Bridge decks
-
Class 18: High noise
下载地址:
https://registry.opendata.aws/dc-lidar-2015/
semantic3d数据集
semantic3d提供一个带有大标签自然场景的3D点云数据集,总计超过40亿个点。它还涵盖了多种多样的城市场景:churches, streets, railroad tracks, squares, villages, soccer fields, castles等。semantic3d提供的点云已使用最先进的设备进行静态扫描,包含非常精细的细节。
semantic3d数据集三维场景中的语义分割评估有一个框架,该框架提供:
-
大量点云,包含超过40亿个标记点
-
真实标签,由专业评估人员手工标记
-
一个通用的评估工具,可提供已建立的交叉联合度量方法以及完整的混淆矩阵
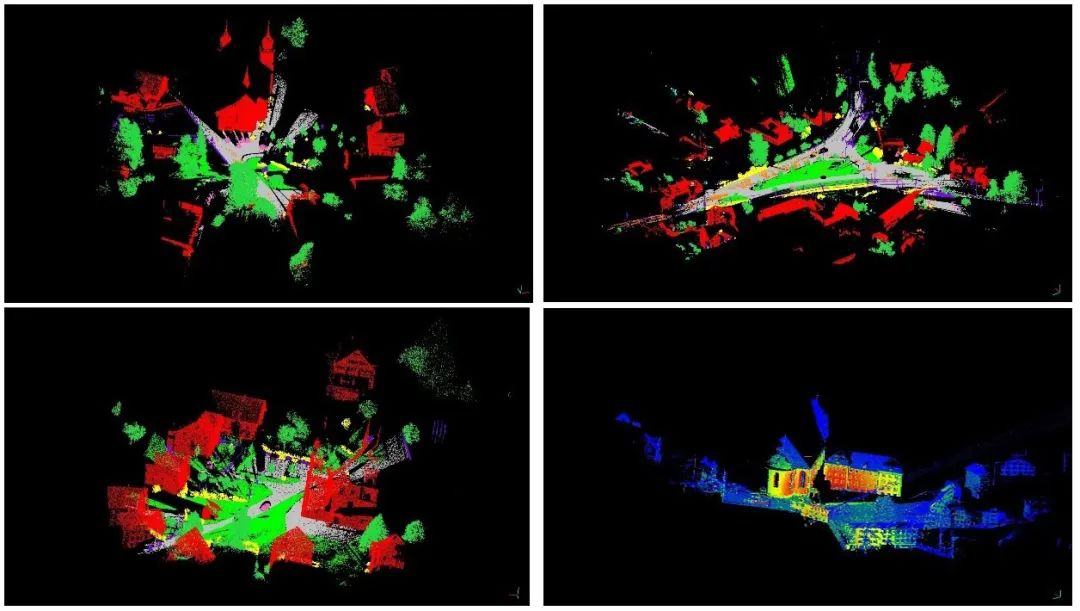
图5 semantic3d数据集示例
下载地址:
http://www.semantic3d.net/
参考文献:Hackel T, Savinov N, Ladicky L, et al. Semantic3d. net: A new large-scale point cloud classification benchmark[J]. arXiv preprint arXiv:1704.03847, 2017.
Paris-Lille-3D数据集
Paris-Lille-3D是点云分类的基准数据集。数据由法国两个不同城市(巴黎和里尔)的移动激光系统(MLS)产生。点云已完全被手工标记为50种不同的类别,以帮助对社区进行自动点云分割和分类算法的研究。数据的每个文件均以单独的ply文件存储。数据的汇总见表1,每个ply点云文件均包含10个属性:
-
x, y, z (float) : 点的位置
-
x_origin, y_origin, z_origin (float) : LiDAR位置
-
GPS_time (double) : 点云获取时间
-
reflectance (uint8) : 反射率
-
label (uint32) : 点云所属标签
-
class (uint32) : 点云所属类别
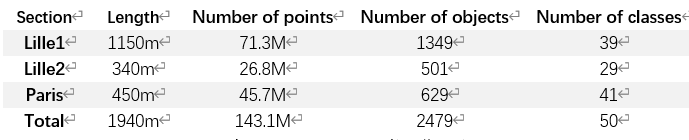
表1 Paris-Lille-3D数据集汇总
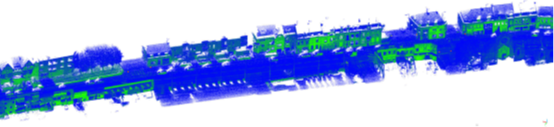
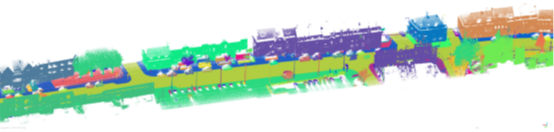
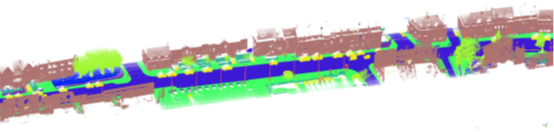
图6 部分数据集示例
下载地址:
http://npm3d.fr/paris-lille-3d
参考文献:Roynard X, Deschaud J E, Goulette F. Paris-Lille-3D: A Point Cloud Dataset for Urban Scene Segmentation and Classification[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops. 2018: 2027-2030.
DublinCity数据集
DublinCity数据集是都柏林大学学院(UCD)的城市建模小组通过ALS设备扫描都柏林市中心的主要区域(大约5.6 km²)获得的。在总共的14亿个点云中包含大约2.6亿个标记点。标记区域位于点云的最密集采样部分,并且被航空影像完全覆盖。
数据集被标注为3个级别共13个类(图7):
Level 1:此级别包含粗略的标签,包括4个类别:(a)Building;(b)Ground;(c)Vegetation;(d)Undefined。建筑物都是可居住的城市结构(例如房屋,办公室,学校和图书馆)。地面主要包含位于地形高程的点。植被类别包括所有类型的植物。未定义的点是那些不太受欢迎的点,可包含在城市元素中(例如垃圾桶,装饰雕塑,汽车,长凳,电线杆,邮政信箱和非静态物体)。大约10%的被标记为未定义的点主要是河流,铁路和建筑工地。
Level 2:在此级别中,级别1的前三个类别进一步精细分类。建筑物被标记为屋顶和外墙;植被被分为不同的植物(例如乔木和灌木丛);地面点分为街道,人行道和草地。
Level 3:包括屋顶(例如屋顶窗和天窗)和外墙上的任何类型的门窗。
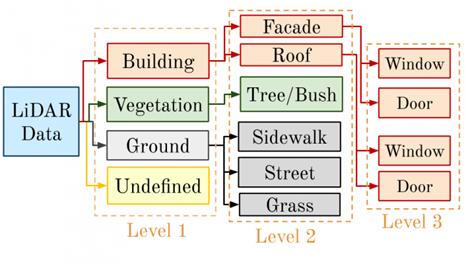
图7 数据标注细节

图8 数据采集区域
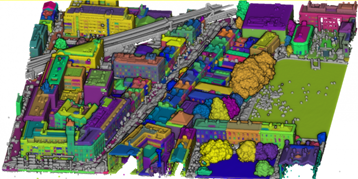
图9 数据集示例
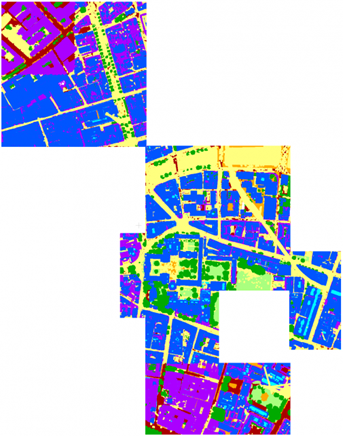
图10 数据标注示例
下载地址:
https://v-sense.scss.tcd.ie/DublinCity/
参考文献:S M Iman Zolanvari, Susana Ruano, Aakanksha Rana, Alan Cummins, Rogerio Eduardo da Silva, Morteza Rahbar, Aljosa Smolic. 2019 DublinCity: Annotated LiDAR Point Cloud and its Applications. 30th BMVC, September 2019.
特别鸣谢:本期微推资料由公众号IMARS遥感大数据智能挖掘与分析提供,联合《遥感学报》微信公众号共同推出。
申明:本期发布的网站内容均不代表本号观点,本号旨在提供参考素材以便学习交流。
激光雷达如何获取点云数据?
图片来源于网络
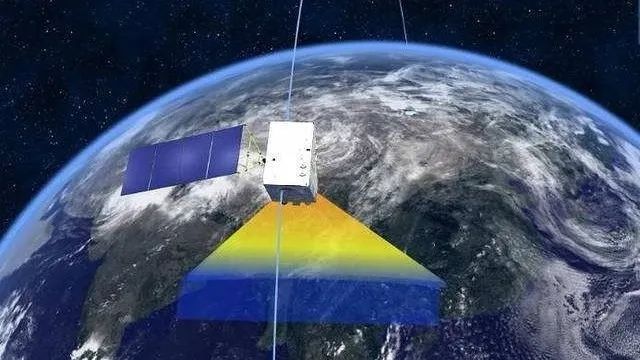
激光雷达(激光探测及测距)主要用激光器作为发射光源,由发射系统、接收系统 、信息处理等部分组成。它利用激光对地球表面进行密集采样,以产生高精度的 x,y,z 测量值。
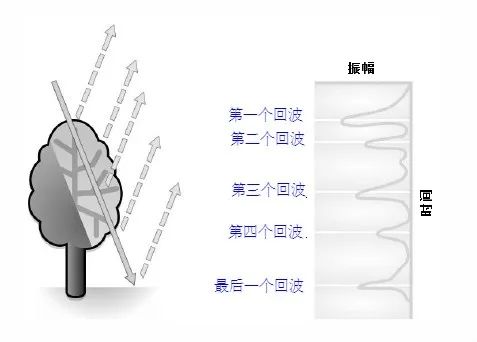
激光雷达系统发射的激光脉冲会从地表面和地表上的物体(植被、建筑物和桥梁等)反射,发射出一个激光脉冲可能会以一个或多个回波的形式返回到激光雷达传感器。任何发射出的激光脉冲在向地面传播时,如果遇到多个反射表面则会被分割成与反射表面一样多的回波。
图片来源于网络
最先返回的激光脉冲是最重要的回波,它与地表最高的要素相关联,如树顶或建筑物顶部。多个回波可以检测向外发射激光脉冲的激光脚点内的多个对象高程。中间的回波通常对应于植被结构,最后的回波常对应于裸露地表。
经过后处理,从空间上进行组织的激光雷达数据被称为点云数据。初始点云是 3D 高程点的大集合,其包括 x 、y 、z 值以及 GPS 时间等属性。在初始激光雷达点云经过后处理后,可对激光遇到的特定表面要素进行分类。任何激光束在测量过程中遇到的物体(如地面、建筑物、森林冠层、高速公路)构成了激光点云数据。
往 期 推 荐

资源共享第三弹,统计资料精粹

资源分享第二弹,数据资料大荟萃

资源分享第一弹:在哪都能好好学
分享(一)高光谱遥感数据集

地震遥感论文集萃

水资源遥感论文集萃

编辑:薇薇
审校:雪儿
指导:梧桐君
声明
欢迎转载、转发本号原创内容,转载信息请与本号联系授权,标注原作者和信息来源为《遥感学报》。
本号转载信息旨在传播交流,其内容由作者负责,不代表本号观点。文中部分资料来源于网络,如涉及作品文字、图片等内容、版权和其他问题请在20日内与本号联系,我们将在第一时间处理。《遥感学报》拥有最终解释权。
微信加群
为便于学术交流,提供优质服务,《遥感学报》建立了微信群。需要加群的小伙伴,请加小编个人微信入群,并备注:姓名+单位。营销广告者勿扰。
微推转载、合作联系:
E-mail:jrs@radi.ac.cn 或 微信后台留言。


 投稿网站:http://www.jors.cn
投稿网站:http://www.jors.cn 好看就点这里哦
好看就点这里哦

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 0
0 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)