【39】图像分割:Chan-Vese水平集方法原理与实现
图像分割的核心是从复杂背景中分离出目标区域,但传统边缘-based方法往往受限于模糊边界或弱对比度。2001年,Tony F. Chan和Luminita Vese提出的ACWE模型(Active Contours Without Edges),结合了Mumford-Shah分割理论与水平集方法,无需依赖图像梯度(边缘信息),而是通过区域统计特征引导轮廓演化,特别适合复杂结构(如医学影像、弱边缘目
简介
图像分割的核心是从复杂背景中分离出目标区域,但传统边缘-based方法往往受限于模糊边界或弱对比度。2001年,Tony F. Chan和Luminita Vese提出的ACWE模型(Active Contours Without Edges),结合了Mumford-Shah分割理论与水平集方法,无需依赖图像梯度(边缘信息),而是通过区域统计特征引导轮廓演化,特别适合复杂结构(如医学影像、弱边缘目标)的分割。
一、水平集方法:从曲线到高维函数的隐式表达
水平集(Level Set)是一种隐式轮廓跟踪方法,由Sethian和Osher于1988年提出。其核心思想是:将低维空间中的运动曲线/曲面,隐含地表示为高维函数的“零水平集”(即函数值为0的点集)。
举个直观例子:二维平面上的圆 (x2+y2=1(x^2 + y^2 = 1(x2+y2=1),可以看作三维空间中函数 (f(x,y)=x2+y2(f(x,y) = x^2 + y^2(f(x,y)=x2+y2) 的“1水平集”(所有满足 (f(x,y)=1(f(x,y)=1(f(x,y)=1) 的点)。若我们让这个圆随时间演化(比如扩张或收缩),只需修改高维函数 (f(x,y,t)(f(x,y,t)(f(x,y,t)),再从每个时刻的函数中提取“零水平集”,就能得到动态的轮廓。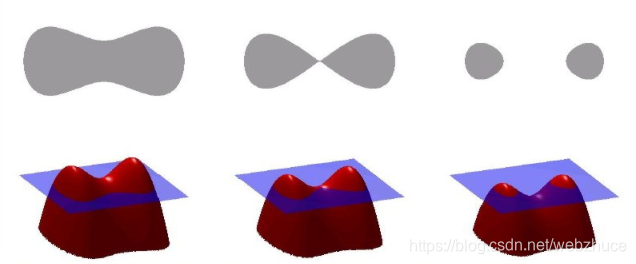
水平集的优势在于:
- 自动处理拓扑变化:无需手动调整轮廓的连接/分裂(如分割多个目标时,轮廓可自然分裂);
- 数学严谨性:通过偏微分方程(PDE)描述轮廓演化,便于融入正则项(如平滑、长度约束)。
二、Chan-Vese模型:无边缘的区域主动轮廓
Chan-Vese模型(简称CV模型)是水平集方法与Mumford-Shah分割的结合,其能量函数仅依赖区域的统计特征(如灰度均值),而非边缘梯度。
1. 能量函数的构成
对于图像(u0(x,y))(u_0(x,y))(u0(x,y)),CV模型的能量函数定义为:E(ϕ)=μL(ϕ)+uA(ϕ)+λ1∫Ω(u0−c1)2H(ϕ)dxdy+λ2∫Ω(u0−c2)2(1−H(ϕ))dxdy E(\phi) = \mu L(\phi) + u A(\phi) + \lambda_1 \int_{\Omega} (u_0 - c_1)^2 H(\phi) dxdy + \lambda_2 \int_{\Omega} (u_0 - c_2)^2 (1 - H(\phi)) dxdy E(ϕ)=μL(ϕ)+uA(ϕ)+λ1∫Ω(u0−c1)2H(ϕ)dxdy+λ2∫Ω(u0−c2)2(1−H(ϕ))dxdy
其中:
- (L(ϕ))(L(\phi))(L(ϕ)):轮廓的长度(正则项,约束轮廓平滑);
- (A(ϕ)(A(\phi)(A(ϕ)):轮廓包围的面积(可选正则项,控制轮廓大小);
- (c1(c_1(c1):轮廓内部((ϕ>0(\phi > 0(ϕ>0))的灰度均值;
- (c2(c_2(c2):轮廓外部((ϕ<0(\phi < 0(ϕ<0))的灰度均值;
- (H(ϕ)(H(\phi)(H(ϕ)):Heaviside函数(区分内外区域);
- (μ,u,λ1,λ2(\mu, u, \lambda_1, \lambda_2(μ,u,λ1,λ2):权重参数(平衡各能量项)。
2. 平滑的Heaviside与Dirac函数
原始Heaviside函数是阶跃函数(不连续),Dirac函数是冲激函数(不可导),无法直接用于数值计算。因此CV模型使用平滑近似:
- 平滑Heaviside函数:Hϵ(ϕ)=12(1+2πarctan(ϕϵ)) H_\epsilon(\phi) = \frac{1}{2} \left( 1 + \frac{2}{\pi} \arctan\left( \frac{\phi}{\epsilon} \right) \right) Hϵ(ϕ)=21(1+π2arctan(ϵϕ))
- 平滑Dirac函数(Heaviside的导数):δϵ(ϕ)=ϵπ(ϵ2+ϕ2) \delta_\epsilon(\phi) = \frac{\epsilon}{\pi (\epsilon^2 + \phi^2)} δϵ(ϕ)=π(ϵ2+ϕ2)ϵ其中 (epsilonepsilonepsilon) 是控制平滑程度的小参数(通常取1)。
3. 水平集的迭代更新
通过变分法最小化能量函数 (E(ϕ)(E(\phi)(E(ϕ)),可得到水平集函数 (ϕ(\phi(ϕ) 的演化方程:∂ϕ∂t=δϵ(ϕ)(μκ−u−λ1(u0−c1)2+λ2(u0−c2)2) \frac{\partial \phi}{\partial t} = \delta_\epsilon(\phi) \left( \mu \kappa - u - \lambda_1 (u_0 - c_1)^2 + \lambda_2 (u_0 - c_2)^2 \right) ∂t∂ϕ=δϵ(ϕ)(μκ−u−λ1(u0−c1)2+λ2(u0−c2)2)其中 (κ(\kappa(κ) 是轮廓的曲率(控制轮廓平滑)。
迭代过程中,需交替计算:
- (Hϵ(ϕ)(H_\epsilon(\phi)(Hϵ(ϕ)) 和 (δϵ(ϕ)(\delta_\epsilon(\phi)(δϵ(ϕ));
- 内部均值 (c1(c_1(c1) 和外部均值 (c2(c_2(c2);
- 曲率 (κ(\kappa(κ);
- 更新 (ϕ(\phi(ϕ)。
三、python实现
import cv2
import numpy as np
import math
class LevelSet:
def __init__(self, src):
"""构造函数:处理输入图像"""
if len(src.shape) == 3:
self.src_ = cv2.cvtColor(src, cv2.COLOR_BGR2GRAY)
self.image_ = src.copy() # 保留彩色图用于可视化
else:
self.src_ = src.copy()
self.image_ = cv2.cvtColor(src, cv2.COLOR_GRAY2BGR)
self.src_ = self.src_.astype(np.float32) # 转换为32位浮点型
self.phi_ = np.zeros(self.src_.shape, dtype=np.float32)
self.dirac_ = np.zeros(self.src_.shape, dtype=np.float32)
self.heaviside_ = np.zeros(self.src_.shape, dtype=np.float32)
self.curvature_ = np.zeros(self.src_.shape, dtype=np.float32)
# 参数设置
self.iter_num_ = 100 # 迭代次数
self.lambda1_ = 1.0 # c1拟合项权重
self.lambda2_ = 1.0 # c2拟合项权重
self.mu_ = 0.1 * 255 * 255 # 长度项权重(μ)
self.nu_ = 0.0 # 面积项权重(ν,默认0)
self.timestep_ = 0.1 # 时间步长(δt)
self.epsilon_ = 1.0 # 平滑参数(ε)
self.c1_ = 0.0 # 内部灰度均值
self.c2_ = 0.0 # 外部灰度均值
def initializePhi(self, center, radius):
"""初始化水平集函数(圆)"""
c = 2.0 # 内外区域的函数值(非零)
rows, cols = self.src_.shape
for i in range(rows):
for j in range(cols):
dist = math.sqrt((j - center[0]) ** 2 + (i - center[1]) ** 2)
value = -dist + radius
if abs(value) < 0.1:
self.phi_[i, j] = 0 # 零水平集(初始轮廓)
elif value >= 0.1:
self.phi_[i, j] = c # 内部
else:
self.phi_[i, j] = -c # 外部
def computeGradient(self, src):
"""计算梯度"""
if src.shape[0] < 2 or src.shape[1] < 2:
return np.zeros_like(src), np.zeros_like(src)
grad_x = np.zeros_like(src)
grad_y = np.zeros_like(src)
rows, cols = src.shape
# 计算x方向梯度
for i in range(rows):
for j in range(cols):
if j == 0:
grad_x[i, j] = src[i, j + 1] - src[i, j]
elif j == cols - 1:
grad_x[i, j] = src[i, j] - src[i, j - 1]
else:
grad_x[i, j] = (src[i, j + 1] - src[i, j - 1]) / 2.0
# 计算y方向梯度
for j in range(cols):
for i in range(rows):
if i == 0:
grad_y[i, j] = src[i + 1, j] - src[i, j]
elif i == rows - 1:
grad_y[i, j] = src[i, j] - src[i - 1, j]
else:
grad_y[i, j] = (src[i + 1, j] - src[i - 1, j]) / 2.0
return grad_x, grad_y
def computeDirac(self):
"""计算平滑Dirac函数"""
k1 = self.epsilon_ / math.pi
k2 = self.epsilon_ * self.epsilon_
for i in range(self.src_.shape[0]):
for j in range(self.src_.shape[1]):
phi = self.phi_[i, j]
self.dirac_[i, j] = k1 / (k2 + phi * phi)
def computeHeaviside(self):
"""计算平滑Heaviside函数"""
k = 2.0 / math.pi
for i in range(self.src_.shape[0]):
for j in range(self.src_.shape[1]):
phi = self.phi_[i, j]
self.heaviside_[i, j] = 0.5 * (1 + k * math.atan(phi / self.epsilon_))
def computeCurvature(self):
"""计算曲率"""
grad_x, grad_y = self.computeGradient(self.phi_)
# 计算梯度的模长
grad_norm = np.sqrt(grad_x ** 2 + grad_y ** 2)
grad_norm[grad_norm == 0] = 1e-10 # 避免除零
# 计算单位梯度
dx_unit = grad_x / grad_norm
dy_unit = grad_y / grad_norm
# 计算单位梯度的二阶导数
dxx, _ = self.computeGradient(dx_unit)
_, dyy = self.computeGradient(dy_unit)
self.curvature_ = dxx + dyy
def computeC(self):
"""计算区域均值c1、c2"""
sum_in = 0.0
sum_out = 0.0
count_in = 0.0
count_out = 0.0
for i in range(self.src_.shape[0]):
for j in range(self.src_.shape[1]):
h = self.heaviside_[i, j]
pix = self.src_[i, j]
sum_in += h * pix
count_in += h
sum_out += (1 - h) * pix
count_out += (1 - h)
self.c1_ = sum_in / (count_in + 1e-10) # 避免除零
self.c2_ = sum_out / (count_out + 1e-10)
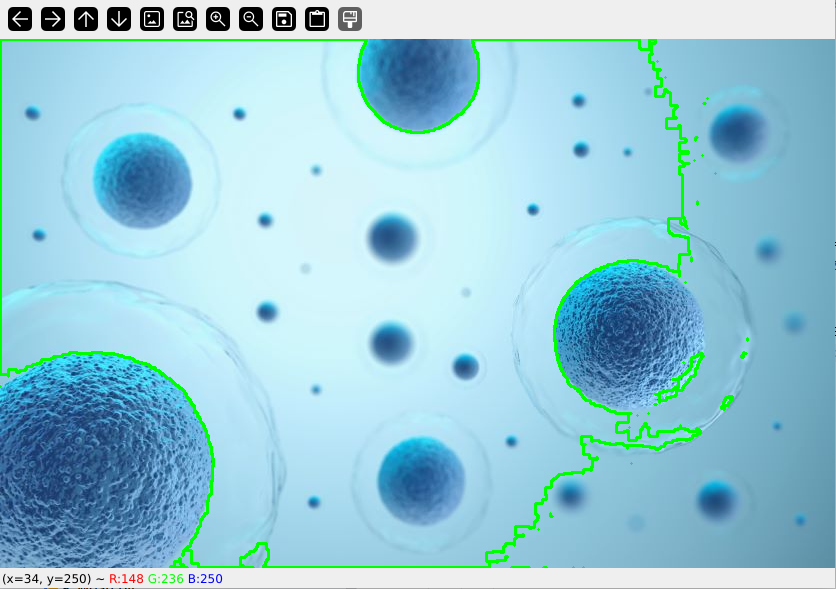
def showEvolving(self):
"""显示演化过程"""
show_img = self.image_.copy()
mask = self.phi_ >= 0 # 内部区域(φ≥0)
# 膨胀+腐蚀去除噪声,提取轮廓
kernel = np.ones((3, 3), np.uint8)
mask = mask.astype(np.uint8)
mask = cv2.dilate(mask, kernel, iterations=3)
mask = cv2.erode(mask, kernel, iterations=3)
# 查找并绘制轮廓
contours, _ = cv2.findContours(mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
cv2.drawContours(show_img, contours, -1, (0, 255, 0), 2)
cv2.imshow("Evolving Contour", show_img)
cv2.waitKey(10) # 延迟10ms,观察演化过程
def evolving(self):
"""主迭代函数"""
self.showEvolving() # 显示初始轮廓
for iter in range(self.iter_num_):
self.computeHeaviside() # 计算H_ε(φ)
self.computeDirac() # 计算δ_ε(φ)
self.computeCurvature() # 计算曲率κ
self.computeC() # 计算c1、c2
# 更新水平集函数φ
for i in range(self.src_.shape[0]):
for j in range(self.src_.shape[1]):
phi = self.phi_[i, j]
dirac = self.dirac_[i, j]
curv = self.curvature_[i, j]
pix = self.src_[i, j]
# 演化项:长度项 + 面积项 + 拟合项
length_term = self.mu_ * dirac * curv
area_term = self.nu_ * dirac
fit_term = dirac * (-self.lambda1_ * (pix - self.c1_) ** 2
+ self.lambda2_ * (pix - self.c2_) ** 2)
delta_phi = self.timestep_ * (length_term + area_term + fit_term)
self.phi_[i, j] += delta_phi
self.showEvolving() # 显示当前演化结果
cv2.waitKey(0)
cv2.destroyAllWindows()
# 使用示例
if __name__ == "__main__":
# 读取图像
img = cv2.imread("image/11.jpeg")
if img is None:
# 如果没有图像,创建一个测试图像
img = np.ones((300, 300, 3), dtype=np.uint8) * 128
cv2.circle(img, (150, 150), 80, (255, 255, 255), -1)
# 创建LevelSet对象
ls = LevelSet(img)
# 初始化水平集函数(圆心和半径)
center = (img.shape[1] // 2, img.shape[0] // 2)
radius = min(img.shape[0], img.shape[1]) // 4
ls.initializePhi(center, radius)
# 开始演化
ls.evolving()
获取更多资料
我给大家整理了一套全网最全的人工智能学习资料(1.5T),包括:机器学习,深度学习,大模型,CV方向,NLP方向,kaggle大赛,实战项目、自动驾驶,AI就业等免费获取。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 8
8 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)